Musical Applications of Electric Field Sensing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Pro 2 OS 1.4 Addendum
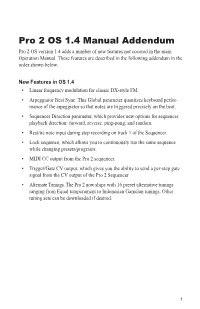
Pro 2 OS 1.4 Manual Addendum Pro 2 OS version 1.4 adds a number of new features not covered in the main Operation Manual. These features are described in the following addendum in the order shown below. New Features in OS 1.4 • Linear frequency modulation for classic DX-style FM. • Arpeggiator Beat Sync. This Global parameter quantizes keyboard perfor- mance of the arpeggiator so that notes are triggered precisely on the beat. • Sequencer Direction parameter, which provides new options for sequencer playback direction: forward, reverse, ping-pong, and random. • Rest/tie note input during step recording on track 1 of the Sequencer. • Lock sequence, which allows you to continuously run the same sequence while changing presets/programs. • MIDI CC output from the Pro 2 sequencer. • Trigger/Gate CV output, which gives you the ability to send a per-step gate signal from the CV output of the Pro 2 Sequencer. • Alternate Tunings. The Pro 2 now ships with 16 preset alternative tunings ranging from Equal temperament to Indonesian Gamelan tunings. Other tuning sets can be downloaded if desired. 1 Checking Your Operating System Version If you’ve just purchased your Pro 2 new, OS 1.4 may already be installed. If not, and you want to use the new features just described, you’ll need to update your OS to version 1.4 or later. To update your Pro 2 OS, you’ll need a computer and a USB cable, or a MIDI cable and MIDI interface. To download the latest version of the Pro 2 OS along with instructions on how to perform a system update, visit the Sequential website at: https://www.sequential.com/download-latest-pro-2-os/ To check your OS version: 1. -
Digital Developments 70'S
Digital Developments 70’s - 80’s Hybrid Synthesis “GROOVE” • In 1967, Max Mathews and Richard Moore at Bell Labs began to develop Groove (Generated Realtime Operations on Voltage- Controlled Equipment) • In 1970, the Groove system was unveiled at a “Music and Technology” conference in Stockholm. • Groove was a hybrid system which used a Honeywell DDP224 computer to store manual actions (such as twisting knobs, playing a keyboard, etc.) These actions were stored and used to control analog synthesis components in realtime. • Composers Emmanuel Gent and Laurie Spiegel worked with GROOVE Details of GROOVE GROOVE System included: - 2 large disk storage units - a tape drive - an interface for the analog devices (12 8-bit and 2 12-bit converters) - A cathode ray display unit to show the composer a visual representation of the control instructions - Large array of analog components including 12 voltage-controlled oscillators, seven voltage-controlled amplifiers, and two voltage-controlled filters Programming language used: FORTRAN Benefits of the GROOVE System: - 1st digitally controlled realtime system - Musical parameters could be controlled over time (not note-oriented) - Was used to control images too: In 1974, Spiegel used the GROOVE system to implement the program VAMPIRE (Video and Music Program for Interactive, Realtime Exploration) • Laurie Spiegel at the GROOVE Console at Bell Labs (mid 70s) The 1st Digital Synthesizer “The Synclavier” • In 1972, composer Jon Appleton, the Founder and Director of the Bregman Electronic Music Studio at Dartmouth wanted to find a way to control a Moog synthesizer with a computer • He raised this idea to Sydney Alonso, a professor of Engineering at Dartmouth and Cameron Jones, a student in music and computer science at Dartmouth. -

The Definitive Guide to Evolver by Anu Kirk the Definitive Guide to Evolver
The Definitive Guide To Evolver By Anu Kirk The Definitive Guide to Evolver Table of Contents Introduction................................................................................................................................................................................ 3 Before We Start........................................................................................................................................................................... 5 A Brief Overview ......................................................................................................................................................................... 6 The Basic Patch........................................................................................................................................................................... 7 The Oscillators ............................................................................................................................................................................ 9 Analog Oscillators....................................................................................................................................................................... 9 Frequency ............................................................................................................................................................................ 10 Fine ...................................................................................................................................................................................... -

NCRC Award Brian Docs
NCRC 2012 Radio Awards Application, Documentary Bio and Program Note Producer: Brian Meagher Bio: It all began when I was six years old and I heard `Popcorn` for the first time. I remember being at the A&W Drive-In, the waitresses arriving at our car on roller skates, and this incredible song providing the soundtrack. Electronic music has provided my soundtrack ever since. Program: Synthumentary (episodes 1-3) Description: Synthumentary is a five-part look at the evolution of the electronic instruments and their place in popular culture, from the earliest electromechanical musical devices to the Moog explosion of the late 60`s and early 70`s. Synthumentary presents a survey of the landmark inventors, instruments, artists and recordings of each era. In each episode, we look at a different scene, discuss the era`s principle actors and play some of their music to illustrate the style of music made at the time. The evolution of electronic music technology is explained to frame each episode. Our aim is to provide the casual listener of electronic music with an appreciation of its possibilities and the more knowledgeable fan with at least a few nuggets of novel information. Among the subjects covered are: The Telharmonium, Theremin, The ”Forbidden Planet” Soundtrack, Raymond Scott, The Ondioline, Jean-Jacques Perrey and Gershon Kingsley, Bob Moog and the Moog music phenomena, Silver Apples, and the Canadian scene: Hugh LeCaine to Bruce Haack to Jean Sauvageau. The intro and outro theme is an original composition written and performed by members of The Unireverse for Synthumentary. The audio submitted contains excerpts from all three episodes. -

Exploring Communication Between Skilled Musicians and Novices During Casual Jam Sessions
Exploring Communication Between Skilled Musicians and Novices During Casual Jam Sessions Theresa Nichols MSc. IT Product Design The University of Southern Denmark Alsion 2, 6400 Sønderborg, Denmark [email protected] ABSTRACT [7], thus by ignoring what is out of reach, the learning process This paper explores the use of communication between skilled itself simplifies the instrument as needed. musicians and novices during casual jam sessions within a community of practice in order to gain insight into how design At a certain level of proficiency with an instrument, the might be used to augment this communication and assist novice instrument and musician become one [7]. When an instrument musicians during the process of playing collaboratively. After becomes an extension of the musician's body, the physical observation, color coded stickers were introduced as place- motions necessary to play notes and chords requires less markers, which aided in the communication of instruction. The concentration. Skilled musicians can also feel the music and are learning that took place and the roles of skilled musicians and able to respond with harmonious notes instinctively. Unlike an novices are considered, and design implications of these experienced musician, a beginner who is in the early stages of considerations are discussed. learning to play an instrument does not have this kind of embodied connection to their instrument or posses the same deep understanding of the language of music. When skilled musicians Keywords and novices play together, the skilled musicians can share some of Collaborative music-making, Jamming, Community of practice their musical knowledge and experience in order to help guide novices throughout their collaboration, creating a community 1. -

UCLA Electronic Theses and Dissertations
UCLA UCLA Electronic Theses and Dissertations Title Performing Percussion in an Electronic World: An Exploration of Electroacoustic Music with a Focus on Stockhausen's Mikrophonie I and Saariaho's Six Japanese Gardens Permalink https://escholarship.org/uc/item/9b10838z Author Keelaghan, Nikolaus Adrian Publication Date 2016 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA Los Angeles Performing Percussion in an Electronic World: An Exploration of Electroacoustic Music with a Focus on Stockhausen‘s Mikrophonie I and Saariaho‘s Six Japanese Gardens A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Musical Arts by Nikolaus Adrian Keelaghan 2016 © Copyright by Nikolaus Adrian Keelaghan 2016 ABSTRACT OF THE DISSERTATION Performing Percussion in an Electronic World: An Exploration of Electroacoustic Music with a Focus on Stockhausen‘s Mikrophonie I and Saariaho‘s Six Japanese Gardens by Nikolaus Adrian Keelaghan Doctor of Musical Arts University of California, Los Angeles, 2016 Professor Robert Winter, Chair The origins of electroacoustic music are rooted in a long-standing tradition of non-human music making, dating back centuries to the inventions of automaton creators. The technological boom during and following the Second World War provided composers with a new wave of electronic devices that put a wealth of new, truly twentieth-century sounds at their disposal. Percussionists, by virtue of their longstanding relationship to new sounds and their ability to decipher complex parts for a bewildering variety of instruments, have been a favored recipient of what has become known as electroacoustic music. -

User Manual Keystep - Overview 4 1.1.2.2
USER MANUAL Special Thanks DIRECTION Frederic BRUN Nicolas DUBOIS Jean-Gabriel Philippe CAVENEL Kévin MOLCARD SCHOENHENZ ENGINEERING Sebastien COLIN Olivier DELHOMME INDUSTRIALIZATION Nicolas DUBOIS DESIGN Glen DARCEY Sébastien ROCHARD DesignBox TESTING Benjamin RENARD BETA TESTING Marco CORREIA Paul BEAUDOIN Gustavo LIMA Tony Flying Squirrel (Koshdukai) Boele GERKES Guillaume BONNEAU Tom HALL Jeff HALER Mark DUNN MANUAL Leo DER STEPANIAN Minoru KOIKE Jose RENDON (author) Vincent LE HEN Holger STEINBRINK Randy Lee Charlotte METAIS Jack VAN © ARTURIA SA – 2019 – All rights reserved. 26 avenue Jean Kuntzmann 38330 Montbonnot-Saint-Martin FRANCE http://www.arturia.com Information contained in this manual is subject to change without notice and does not represent a commitment on the part of Arturia. The software described in this manual is provided under the terms of a license agreement or non-disclosure agreement. The software license agreement specifies the terms and conditions for its lawful use. No part of this manual may be reproduced or transmitted in any form or by any purpose other than purchaser’s personal use, without the express written permission of ARTURIA S.A. All other products, logos or company names quoted in this manual are trademarks or registered trademarks of their respective owners. Product version: 1.1 Revision date: 21 August 2019 Thank you for purchasing the Arturia KeyStep! This manual covers the features and operation of Arturia’s KeyStep, a full-featured USB MIDI keyboard controller complete with a polyphonic sequencer, arpeggiator, a robust set of MIDI and C/V connections, and outfitted with our new Slimkey keyboard for maximum playability in the minimum space. -

Hugh Le Caine: Pioneer of Electronic Music in Canada Gayle Young
Document généré le 25 sept. 2021 13:04 HSTC Bulletin Journal of the History of Canadian Science, Technology and Medecine Revue d’histoire des sciences, des techniques et de la médecine au Canada Hugh Le Caine: Pioneer of Electronic Music in Canada Gayle Young Volume 8, numéro 1 (26), juin–june 1984 URI : https://id.erudit.org/iderudit/800181ar DOI : https://doi.org/10.7202/800181ar Aller au sommaire du numéro Éditeur(s) HSTC Publications ISSN 0228-0086 (imprimé) 1918-7742 (numérique) Découvrir la revue Citer cet article Young, G. (1984). Hugh Le Caine: Pioneer of Electronic Music in Canada. HSTC Bulletin, 8(1), 20–31. https://doi.org/10.7202/800181ar Tout droit réservé © Canadian Science and Technology Historical Association / Ce document est protégé par la loi sur le droit d’auteur. L’utilisation des Association pour l'histoire de la science et de la technologie au Canada, 1984 services d’Érudit (y compris la reproduction) est assujettie à sa politique d’utilisation que vous pouvez consulter en ligne. https://apropos.erudit.org/fr/usagers/politique-dutilisation/ Cet article est diffusé et préservé par Érudit. Érudit est un consortium interuniversitaire sans but lucratif composé de l’Université de Montréal, l’Université Laval et l’Université du Québec à Montréal. Il a pour mission la promotion et la valorisation de la recherche. https://www.erudit.org/fr/ 20 HUGH LE CAINE: PIONEER OF ELECTRONIC MUSIC IN CANADA Gayle Young* (Received 15 November 1983; Revised/Accepted 25 June 1984) Throughout history, technology and music have been closely re• lated. Technological developments of many kinds have been used to improve musical instruments. -

SH-01A Manual.Pages
MONOPHONIC / POLYPHONIC / CHORD MACHINE SYNTHESIZER ローランド SH-01Aのユーザーガイド A USER’S GUIDE TO THE ROLAND SH-01A !1 !2 ACKNOWLEDGEMENTS: This manual was assembled, illustrated, and written by Sunshine Jones. All of the content is taken from either his personal experience, existing documentation, and techniques submitted and found in the public domain. The document is intended as a companion guide for the Roland SH-01A Synthesizer Module. It is in no way offered as a criticism, or intended to be an authoritative guide to replace the official documentation which accompanies the commercial purchase of Roland Boutique, or Roland AIRA musical instruments. Rather, this manual is intended to support the musician, the user of these and other synthesizer modules and inspire them to create music, share sounds, and fully realize the synthesizers in front of them. In the tradition of owner’s manuals, rarely are they opened until problems arise. We tell you over and over again to RTFM, but do you listen? No, no you don’t. Manuals should be both tools for reference and instruction, as well as inspirational guides to possibility. An owner’s manual should be equally a pre purchase discovery, meant to inspire the curious with capability and possibility, and a post purchase celebration of depth, technique, guidance, and surprises. But this is by no means the last word. So many people have read and re read a manual only to still have no idea what the manual was attempting to suggest. This owner’s manual is offered free of charge to anyone curious, or frustrated by the tiny little leaflet which covers the operations of the SH-01A in several languages, as a legible alternative to the official documentation. -

Inventing Television: Transnational Networks of Co-Operation and Rivalry, 1870-1936
Inventing Television: Transnational Networks of Co-operation and Rivalry, 1870-1936 A thesis submitted to the University of Manchester for the degree of Doctor of Philosophy In the faculty of Life Sciences 2011 Paul Marshall Table of contents List of figures .............................................................................................................. 7 Chapter 2 .............................................................................................................. 7 Chapter 3 .............................................................................................................. 7 Chapter 4 .............................................................................................................. 8 Chapter 5 .............................................................................................................. 8 Chapter 6 .............................................................................................................. 9 List of tables ................................................................................................................ 9 Chapter 1 .............................................................................................................. 9 Chapter 2 .............................................................................................................. 9 Chapter 6 .............................................................................................................. 9 Abstract .................................................................................................................... -

Creation and Performance of Music Structures
University of Montana ScholarWorks at University of Montana Graduate Student Theses, Dissertations, & Professional Papers Graduate School 1987 Creation and performance of music structures Charles J. Zacky The University of Montana Follow this and additional works at: https://scholarworks.umt.edu/etd Let us know how access to this document benefits ou.y Recommended Citation Zacky, Charles J., "Creation and performance of music structures" (1987). Graduate Student Theses, Dissertations, & Professional Papers. 1933. https://scholarworks.umt.edu/etd/1933 This Thesis is brought to you for free and open access by the Graduate School at ScholarWorks at University of Montana. It has been accepted for inclusion in Graduate Student Theses, Dissertations, & Professional Papers by an authorized administrator of ScholarWorks at University of Montana. For more information, please contact [email protected]. COPYRIGHT ACT OF 1976 THIS IS AN UNPUBLISHED MANUSCRIPT IN WHICH COPYRIGHT SUBSISTS. ANY FURTHER REPRINTING OF ITS CONTENTS MUST BE APPROVED BY THE AUTHOR, I^TANSFIELD LIBRARY UNIVERSITY OF MONTANA DATE : 19 87 THE CREATION AND PERFORMANCE OF MUSIC STRUCTURES Charles J. Zacky B.A., University of California, 1974 M.M., University of Montana, 1983 Presented in partial fulfillment of the requirements for the degree of Master of Science University of Montana 1987 Approved by Chairman,Board of Examiners Date UMI Number: EP35196 All rights reserved INFORMATION TO ALL USERS The quality of this reproduction is dependent upon the quality of the copy submitted. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if material had to be removed, a note will indicate the deletion. -

Experiments in Sound and Electronic Music in Koenig Books Isbn 978-3-86560-706-5 Early 20Th Century Russia · Andrey Smirnov
SOUND IN Z Russia, 1917 — a time of complex political upheaval that resulted in the demise of the Russian monarchy and seemingly offered great prospects for a new dawn of art and science. Inspired by revolutionary ideas, artists and enthusiasts developed innumerable musical and audio inventions, instruments and ideas often long ahead of their time – a culture that was to be SOUND IN Z cut off in its prime as it collided with the totalitarian state of the 1930s. Smirnov’s account of the period offers an engaging introduction to some of the key figures and their work, including Arseny Avraamov’s open-air performance of 1922 featuring the Caspian flotilla, artillery guns, hydroplanes and all the town’s factory sirens; Solomon Nikritin’s Projection Theatre; Alexei Gastev, the polymath who coined the term ‘bio-mechanics’; pioneering film maker Dziga Vertov, director of the Laboratory of Hearing and the Symphony of Noises; and Vladimir Popov, ANDREY SMIRNO the pioneer of Noise and inventor of Sound Machines. Shedding new light on better-known figures such as Leon Theremin (inventor of the world’s first electronic musical instrument, the Theremin), the publication also investigates the work of a number of pioneers of electronic sound tracks using ‘graphical sound’ techniques, such as Mikhail Tsekhanovsky, Nikolai Voinov, Evgeny Sholpo and Boris Yankovsky. From V eavesdropping on pianists to the 23-string electric guitar, microtonal music to the story of the man imprisoned for pentatonic research, Noise Orchestras to Machine Worshippers, Sound in Z documents an extraordinary and largely forgotten chapter in the history of music and audio technology.