Adjacency-Preserving Spatial Treemaps
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

HAMPTON WICK the Thames Landscape Strategy Review 2 2 7
REACH 05 HAMPTON WICK The Thames Landscape Strategy Review 2 2 7 Landscape Character Reach No. 5 HAMPTON WICK 4.05.1 Overview 1994-2012 • Part redevelopment of the former Power Station site - refl ecting the pattern of the Kingston and Teddington reaches, where blocks of 5 storeys have been introduced into the river landscape. • A re-built Teddington School • Redevelopment of the former British Aerospace site next to the towpath, where the river end of the site is now a sports complex and community centre (The Hawker Centre). • Felling of a row of poplar trees on the former power station site adjacent to Canbury Gardens caused much controversy. • TLS funding bid to the Heritage Lottery Fund for enhancements to Canbury Gardens • Landscaping around Half Mile Tree has much improved the entrance to Kingston. • Construction of an upper path for cyclists and walkers between Teddington and Half Mile Tree • New visitor moorings as part of the Teddington Gateway project have enlivened the towpath route • Illegal moorings are increasingly a problem between Half Mile Tree and Teddington. • Half Mile Tree Enhancements 2007 • Timber-yards and boat-yards in Hampton Wick, the Power Station and British Aerospace in Kingston have disappeared and the riverside is more densely built up. LANDSCAPE CHARACTER 4.05.2 The Hampton Wick Reach curves from Kingston Railway Bridge to Teddington Lock. The reach is characterised by residential areas interspersed with recreation grounds. Yet despite tall apartment blocks at various locations on both banks dating from the last 30 years of the 20th century, the reach remains remarkably green and well-treed. -
Thades. [Essex
10~4 SHO THADES. [ESSEX. SHOPKEEPEitS contmued. Rutledge T, o Beaconsfield road, Can~ Shaw John, Witton Wood. .lane,. Rickett William iWalter, I Hart par ning Town E , Frinton-on~Sea ade~ Ilford lane, Ilford Sach Frederick, Copford,. Colchester Sheffield William, gz Chapel street,. Riddell A. 20 Queen's rd, Plaistow E Sadler Herbert, W1:ittle, Chelmsford Stratford E Riddleston Harry,. Layer-de-la-Haye, SaAller Herbsrt · F~rederick William, Sheldxake Mrs-. Katet 30 JI[udson rd. Colchester 74 Northgate street, Colchester Canning Town E Ridgewell Miss Grace, London road, Sage Mrs.Herbert, 8 King st.PlaistwE Shelley G. Galleywcxxi Com. Chlmsfd . Copford, Colchester Sains George, High st. Southminster Shelley U. J. Rivenhall, Witbam Ridgewell Miss Ruth, Netley road, Salmon Joseph, Stebbing, Chelmsford Shelton Mrs. Alice M. 3 Morant rd~ Newbury park, Ilford Salmon M. I Castle st.Saffron Walden Colchester Ridoutt James, ;r Norfolk road, Salmon Mrs. M.Io8Clarence rd.Grays Shelton Harry, North bank, Farm Higham hill, Walthamstow NE Salmon Mrs.Rosetta, Thorpe-le-Soken hill, Waltham Abbey :Rigg E. W. Mount Pleasant, Halstead Salmon S. Post office, High Beech, Shamming E. A. II7 North st.Halstd Riley A. Spring St.Netteswell,Harlow Loughton Sherlock Mrs. Rose, 124 Smart's lane,. Riley Mrs. .Alice, 58 Beaconsfield rd. Samson Ernest, 2 West road, South Loughton Walthamstow NE Stifford, Grays ., · Shipley John, 67 Exmouth road, Riley Harris J. Brentwood road,Heath Sansum James, 15 Rivett street, Walthamsto1v N E Park, Romford Canning Town E Shank Mrs.L.II Beatrice t>t.Plaistw E Binge Mrs. Thomas, Tolleshunt Sapsford Charles, Chigwell Row Shonk Stephen, 2 Cary road, J.,ey- Major, Witham Sargent )'d:rs. -

Canbury Gardens - Development Plan Royal Borough of Kingston Upon Thames
Canbury Gardens - Development plan Royal Borough of Kingston upon Thames Kingston Town Neighbourhood Introduction to the Royal Borough of Kingston upon Thames Kingston is often referred to as a ‘green and leafy’ suburb of Greater London. This characterisation is given partly because of the diverse range of open spaces, from the formal parkland of Canbury Gardens in Kingston Town to the informal hay meadows of Tolworth Court Farm Fields Local Nature Reserve in Tolworth. There are many large and small parks, playing fields and wayside gardens in between. Other open spaces include large mature private gardens in the north of the Borough to the Green Belt farmland in the south. Many of the streets are lined with mature large trees in the Victorian and Edwardian streets and smaller ornamental species in the post-war and modern developments. As a whole, the ‘green leafy’ description is accurate. The Kingston Open Space Assessment (Atkins May 2006) investigated the supply, quality and value of open space. The report provides detailed analysis of all public and private open space provision. % Total Open Open Space Type No. Sites Area (ha) Space District Park 1 10.36 1.2% Local Park 17 113.38 13.3% Small local park/open space 13 18.93 2.2% Linear park/open space 12 22.34 2.6% Total park provision 43 165.01 19.4% Allotments 23 41.70 4.9% Amenity Green space 92 17.81 2.1% Cemeteries 5 18.54 2.2% Horticulture 6 2.22 0.3% Natural/Semi-natural 18 102.13 12.0% Play space 37 22.09 2.6% Playing field (public) 28 87.47 10.3% Woodland 14 47.83 5.6% Total other space provision 223 339.79 40.0% Total park + other space 266 504.8 59.4% Private open space 49 346.32 40.6% Total open space (includes 318 851.12 100% private landholding Open Space provision by type (Atkins 2006) 2 Introduction to Canbury Gardens Address Lower Ham Road, Kingston. -

Meeting Places in Kingston Upon Thames
Meeting Places in Kingston upon Thames NO COST TO HIRERS … Charity Number required upon booking … JOHN LEWIS COMMUNITY HUB 0208 547 4872 NO COST One large room with refreshment [email protected] facilities, tables, chairs and armchairs. Wood Street, Kingston upon Thames, KT1 1TE rd o Wheelchair access to 3 Floor – next to the Nursery Department. o Lifts. o Underground parking. WIFI AVAILABLE and automatically logs into BT John Lewis. Good reception. Password, etc. available upon booking. KINGSTON COUNCIL COMMUNITY ROOM 03337 000595 NO COST o Maximum 14 guests seated around an oval table. The Guildhall Main Building, High Street, [email protected] o 7.00am – 7pm, Monday-Friday Kingston upon Thames, KT1 1EU www.kingston.gov.uk o Tuesday – Wednesday – Thursday, hours can be extended. o Disabled access via lift to the first floor. o Catering can be provided at a cost – contact: [email protected]. o Costs for equipment and catering. WiFi AVAILABLE (passwords, etc. available on the day). Power sockets - Head table with seating for speaker OFFERED TO REGISTERED CHARITIES ONLY AND SCREENED FOR SUITABILITY HIRING COSTS … It is recommended to make contact with the organisation to confirm current fees ACHIEVING FOR CHILDREN 0208 547 6982 £40.00 for o 4 rooms to hire, 3 of which are 1st 4 hours classroom size (see below) King Charles Centre, Surbiton, KT5 9AL [email protected] and £20.00 Events & Training Facilities Assistant thereafter. o 3 x classroom sized rooms with seating capacity from 24 – 42 – classroom seating arrangement. o Hall – seating capacity of 72 classroom seating and 100 theatre style. -

London's Rail & Tube Services
A B C D E F G H Towards Towards Towards Towards Towards Hemel Hempstead Luton Airport Parkway Welwyn Garden City Hertford North Towards Stansted Airport Aylesbury Hertford East London’s Watford Junction ZONE ZONE Ware ZONE 9 ZONE 9 St Margarets 9 ZONE 8 Elstree & Borehamwood Hadley Wood Crews Hill ZONE Rye House Rail & Tube Amersham Chesham ZONE Watford High Street ZONE 6 8 Broxbourne 8 Bushey 7 ZONE ZONE Gordon Hill ZONE ZONE Cheshunt Epping New Barnet Cockfosters services ZONE Carpenders Park 7 8 7 6 Enfield Chase Watford ZONE High Barnet Theydon Bois 7 Theobalds Chalfont Oakwood Grove & Latimer 5 Grange Park Waltham Cross Debden ZONE ZONE ZONE ZONE Croxley Hatch End Totteridge & Whetstone Enfield Turkey Towards Southgate Town Street Loughton 6 7 8 9 1 Chorleywood Oakleigh Park Enfield Lock 1 High Winchmore Hill Southbury Towards Wycombe Rickmansworth Moor Park Woodside Park Arnos Grove Chelmsford Brimsdown Buckhurst Hill ZONE and Southend Headstone Lane Edgware Palmers Green Bush Hill Park Chingford Northwood ZONE Mill Hill Broadway West Ruislip Stanmore West Finchley Bounds 5 Green Ponders End Northwood New Southgate Shenfield Hillingdon Hills 4 Edmonton Green Roding Valley Chigwell Harrow & Wealdstone Canons Park Bowes Park Highams Park Ruislip Mill Hill East Angel Road Uxbridge Ickenham Burnt Oak Key to lines and symbols Pinner Silver Street Brentwood Ruislip Queensbury Woodford Manor Wood Green Grange Hill Finchley Central Alexandra Palace Wood Street ZONE North Harrow Kenton Colindale White Hart Lane Northumberland Bakerloo Eastcote -
![(Essex.] East Ham. 80 Post Office](https://docslib.b-cdn.net/cover/5536/essex-east-ham-80-post-office-445536.webp)
(Essex.] East Ham. 80 Post Office
' (ESSEX.] EAST HAM. 80 POST OFFICE Surrogate for granting Licences of Marriage• ~for Baptut Chapel, North Rtreet ; Rev. W m .elements, ministr proving Wills, Rev. Charles Burney, M.A. Vicarage Baptist (Particular) Chapel, High st.; ministers various PuBLIC ScHooLs :- Independent Chapel, Parson's lane; Rev. John Reynolds, Free Grammar, High street; James Flavell, master miniQter; Rev. Joseph Waite, assistant minister St. Andrew'1 National, High street; John Bryon, Independent Chapel, Higb st.; Rev.Benj.Johnson,ministr master; Miss Mary Ann Earthy, mistress Friends' Meeting House, Colchester road National, Greenstead green; John Isaac, master; Miss PosTING HousEs:- Elizabeth Evens, mistress ' George,' Charles Nunn, Market bill Trinity National, Chapel street; Frederick M nrton, 'White Hart,' William Moye, High street master; Mrs. Emma Murton, mistress 'Bull,' John Elsdon, Bridue street Br-itish, Clipt hedges; William Stratton, master; Miss CoAcH TO BRAINTREE STATION.-The Eagle, evPry Elizabeth Freeman, mistress mornin~r & afternoon, sunday excepted, from the' White Infant, Clipt hedges; Miss Sarah Grey, mistress Hart,' Hi~h street PLACES OP WORSHIP:- CARRIERS TO:- St. ilndrew's Church, High street; Rev. Charles Burney, LONDON-William Howard's waggon, from Brid!le foot, M.A. vic11r; Rev. Fredk. Henry Gray,:s.A.. curate; Rev. to the 'Bull,' Aldgate, monday, tue:,day, thursday & friday Robert Helme, B.A. assistant curate COLCHESTER-Francis Mansfield, from his honsP, Trinity Holy Trinity Church, Chapel street; Rev. Duncan Fraser, street, tuesday, thursday & saturday; returns same days M.A. incumbent; Rev. Charles Cobb, l'tl.A.. curate BRAINTREE-Henry Cresswell, every day, & through to St. James's Church, Greenstead green; Rev. William London on friday Billopp, M.A. -

“It Is Health That Is Real Wealth & Not Pieces of Gold and Silver.”
Healthy eating & cooking Cooking lessons in purpose built kitchens with professional chefs. Nutrition and food budget workshops and obesity support groups. Breakfast, after school and holiday clubs. Gardening & growing food We’re all about... A gardening and growing space where children and adults can experience ‘farm healthy eating & cooking, to fork’. A “wetland area” for learning, an gardening & growing food orchard and a beehive. & exercise, fitness & sports. Gardening & growing the The Centre Exercise, fitness & sports • Brand new community centre food we eat & working together Yoga and pilates, a trim-trail, 5-a-side • Café across the generations. football field, fitness sessions and dance. • Teaching cooking kitchen • 2 multi-use areas • Garden and wetland area • Raised beds and an orchard • Grass amphitheatre “It is health that is real Roots4Life wealth & not pieces of Charlton Manor Primary School Indus Road gold and silver.” London SE7 7EF – Mahatma Gandhi Registered Charity No. 1165003 V1.1 The Charity The Problem Roots4Life is a registered charity that helps Childhood obesity and loneliness and social people of all ages to live healthy and happy isolation are two of the UK’s most prominent lives by improving their physical and mental health risks. They kill more people than well-being and resilience. smoking and costs more than police, fire, law courts and prisons put together. The Baker Centre is a community-hub based in south-east London, run by Roots4Life, Public services are unable to address the that will deliver a range of activities in order scale and severity of the situation but to tackle childhood obesity and loneliness community-led prevention will be highly and isolation within the elderly community. -

Order Form Document
Wandle Industrial Museum Order Form Ref Publication/Product Price No Ref Publication/Product Price No Code Required Code Required A1 An Hour Passed: Merton Abbey £1.00 B31 Fulling Mills of Surrey £3.99 A2 An Hour Passed: Mitcham Grove £1.00 B32 ‘On The Wandle’ Dewey-Bates £1.50 A3 An Hour Passed: Morden Hall Park £1.00 B33 Ghost Carp 1 £5.00 A4 An Hour Passed: Ravensbury Mill £1.00 B34 Ghost Carp 2 £5.00 A5 Set of four ‘An Hour Passed’ £2.50 C1 Postcards Small £0.30 * B1 each B2 William and Evelyn De Morgan £5.00 C2 Young’s Brewery Postcards £0.30 * B3 River Wandle Wildlife Guide £2.00 each B4 Historic River Wandle 1 £1.25 C3 Pastime Postcards £0.50 * B5 C4 Wandle Postcards £0.30 * B6 Historic River Wandle 3 £1.25 each B7 Ravensbury Mill £0.75 C5 Set of seven ‘Wandle’ postcards £1.50 B8 Merton Abbey Mills £2.00 C6 Morris Collection Photo Cards per card £0.30 * B9 River Wandle Companion £15.00 Set of all 8 £2.00 B10 Mills of the River Wandle £3.00 C7 Wandle Tapestry Postcard £0.30 B11 Trouble at Mill £3.00 D1 Lavender Bags £0.50 B12 Wimbledon Historical Glimpse £3.00 D2 Lavender Water 250ml £5.00 B13 D3 Pens £1.00 B14 William Morris (Pitkin) £5.00 D4 Pencils £0.15 B15 William Morris at Merton £3.00 D5 Bookmarks £0.55 * B16 Merton Priory £4.50 D6 Pouch for Glasses £8.00 B17 Town Trails £4.50 D7 Canvas Bags (please state pocket or heart) £5.00 B18 D8 Word Search Booklet 1 £2.50 B21 The Influence of Merton Priory £5.00 D9 Word Search Booklet 2 £2.50 B22 Surrey Iron Railway Leaflet £0.50 D10 Wandle Quiz Book £5.00 B23 Framed Morris Hand Block -

Boundary Commission for Wales
BOUNDARY COMMISSION FOR ENGLAND PROCEEDINGS AT THE 2018 REVIEW OF PARLIAMENTARY CONSTITUENCIES IN ENGLAND HELD AT THE MAIN GUILDHALL, HIGH STREET, KINGSTON UPON THAMES ON FRIDAY 28 OCTOBER 2016 DAY TWO Before: Mr Howard Simmons, The Lead Assistant Commissioner ______________________________ Transcribed from audio by W B Gurney & Sons LLP 83 Victoria Street, London SW1H 0HW Telephone Number: 0203 585 4721/22 ______________________________ Time noted: 9.12 am THE LEAD ASSISTANT COMMISSIONER: Good morning, ladies and gentlemen. Welcome to the second day of the hearing here at Kingston. I am Howard Simmons, the Lead Assistant Commissioner responsible for chairing this session, and my colleague Tim Bowden is here from the Boundary Commission, who may want to say something about the administrative arrangements. MR BOWDEN: Thank you very much indeed, Howard, and good morning. We are scheduled to run until 5 pm today. Obviously, Howard can vary that at his discretion. We have quite a number of speakers. I think so far we have about 29 or 30 pre-booked and the first one is due to start in a couple of moments. Just a few housekeeping rules for the day. We are not expecting any fire alarms. If one does go off, it is out of this door and down the stairs and the meeting point is outside the front of the building; toilets out of the back door, please; ladies to the right, gents down the corridor to the left. Can you keep mobile phones on silent or switched off. If you want to take a call please go out of the back of the room. -

Wandle Trail
Wandsworth N Bridge Road 44 To Waterloo Good Cycling Code Way Wandsworth Ri andon ve Town On all routes… he Thamesr Wandle Sw Walk and Cycle Route T Thames Please be courteous! Always cycle with respect Road rrier Street CyCyclecle Route Fe 37 39 77A F for others, whether other cyclists, pedestrians, NCN Route 4 airfieldOld York Street 156 170 337 Enterprise Way Causeway people in wheelchairs, horse riders or drivers, to Richmond R am St. P and acknowledge those who give way to you. Osiers RoadWandsworth EastWandsworth Hill Plain Wandle Trail Wandle Trail Connection Proposed Borough Links to the Toilets Disabled Toilet Parking Public Public Refreshments Seating Tram Stop Museum On shared paths… Street for Walkers for Walkers to the Trail Future Route Boundary London Cycling Telephone House High Garr & Cyclists Network Key to map ● Armoury Way Give way to pedestrians, giving them plenty att 28 220 270 of room 220 270 B Neville u Lane ❿ WANDLE PARK TO PLOUGH LANE ❾ MERTON ABBEY MILLS TO ❽ MORDEN HALL PARK TO MERTON Wandsworth c ● Keep to your side of the dividing line, k Gill 44 270 h (1.56km, 21 mins) WANDLE PARK (Merton) ❿ ABBEY MILLS ❾ (1.76km, 25 mins) Close Road if appropriate ol d R (0.78km, 11 mins) 37 170 o Mapleton along Bygrove Road, cross the bridge over the Follow the avenue of trees through the park. Cross ● Be prepared to slow down or stop if necessary ad P King Ga river, along the path. When you reach the next When you reach Merantun Way cross at the the bridge over the main river channel. -
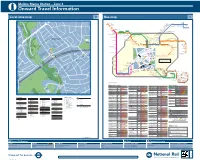
Malden Manor Station – Zone 4 I Onward Travel Information Local Area Map Busbuses Map from Malden Manor
Malden Manor Station – Zone 4 i Onward Travel Information Local area map BusBuses map from Malden Manor 128 55 19 4 9 1 14 O 262 171 BARNFIELD X Subway F O R D C R 185 VOEWOOD CLOSE E K I N S G S 248 W C Ham Beauford Road FRITHAM CLOSE E O N 1 Barnes Putney 144 O Barnes Common T C A D N 101 265 C F Roehampton Lane 250 O K5 L R 8 O HAM D 1 72 259 Lower Richmond Road Putney Bridge S 1 G 1 80 E 44 2 Queen Mary’s 241 A 27 Bowling 22 M A L D E N WAY R Cardinal Avenue 18 207 D E 12 8 47 12 Green E 88 S 2 1 I University Hospital 264 N R 55 A M B E R W O O D R I S E 1 Sports Ground 248 S D 1 O O 71 2 39 Hogsmill River M A L D E N WAY 98 W 1 S R 93 1 M O T S P U R P A R K Roehampton Lane B E 52 BARNES PUTNEY 209 M 1 266 A 2 Supreme 1 2 16 O 85 1 1 ALDRIDGE RISE 276 N 2 Danebury Avenue Bowling Club 1 45 U B Elm Road T R Roehampton River Thames ) O A S H 31 Hail & Ride D Alton Road L S A 2 section A L N Kingston D Roehampton Vale 2 A P S Cromwell Road Bus Station 235 N W ASDA 292 L M Y A I A Kingston Hill 33 N 44 W E S Y B R T G E Kingston Vale E A T Queens Road A K1 294 N D 24 N I C E N W C E A 23 E S Robin Hood E N S Y A 264 C R B V Y 31 ROMNEY ROAD L O O E L E 213 R N R ROEHAMPTON 14 E 39 O U 30 LV Robin Hood Way M T E 279 65 I U 28 W Kingston 2 G 28 S 22 Keswick Avenue H B Hospital G 8 R 1 31 Kingston O R M 306 A N D Eden Street Kingston Norbiton Norbiton Robin Hood Way 24 I 283 I A M D 30 5 35 H Faireld Bus Station Church Coombe Lane West K 45 15 N TURNER ROAD O 26 L ( MILLAIS ROAD A G M Kenley Road Clarence Avenue 1 2 Coombe Girls School O -

Community Spaces in Greenwich
Community Spaces in Greenwich Thamesmead Moorings Abbey Woolwich Riverside Peninsula Wood Plumstead Woolwich Glyndon Charlton Common Blackheath Greenwich West Shooters Hill Kidbrooke Eltham Eltham West North Middle Park & Sutcliffe Eltham South Coldharbour & New Eltham Community Venues for Hire in the Royal Borough of Greenwich Venue Address Telephone Website Contact Name Email Capacity & Facilities Abbey Wood 4 Knee Hill, Large hall, capacity 120, bar and kitchen facilities. Abbey Wood Community 020 8311 www.abbeywoodcommunity Abbey Wood, Ann Arnold [email protected] Small hall, capacity 40, kitchen facilities. Centre 7005 group.org/ London SE2 0YS Disabled access Greenwich & Bexley 185 Bostall Hill, Abbey 020 8312 www.communityhospice.org Variety of rooms, capacity from 10 to 100. Disabled Sue Smyth [email protected] Community Hospice Wood, SE2 0GB 2244 .uk access, full catering service provided. Blackheath & Westcombe 23 Lee Road, 020 8318 http://www.trinitylaban.ac.u 600 seat Great Hall. 160 seat Recital room. Blackheath Halls Blackheath, Hannah Benton [email protected] 9758 k/blackheath-halls.aspx Licensed cafe bar. London SE3 9RQ 90 Mycenae Road, 020 8858 Mark Johnson- Variety of rooms with capacity from 8 to 120. Mycenae House Blackheath, www.mycenaehouse.co.uk/ [email protected] 1749 Brown Kitchen. Disability access ground floor only London SE3 7SE Charlton The Rectory Field, 020 8858 www.blackheathsportsclub.c Contact form on website Bar, dance hall, functions rooms with capacity from Blackheath Sports Club Charlton Road, Tony Bratton 1578 o.uk 10-100. Disability access. London SE3 8SR The Valley, Charlton Athletic Football Floyd Road, 020 8333 Variety of rooms and suites with capacity from 20 www.charltonevents.com [email protected] Club, The Valley Charlton, 4040 to 1000.