Verification of Qualitative Properties of Rule-Based Expert Systems 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wikipedia Knowledge Graph with Deepdive
The Workshops of the Tenth International AAAI Conference on Web and Social Media Wiki: Technical Report WS-16-17 Wikipedia Knowledge Graph with DeepDive Thomas Palomares Youssef Ahres [email protected] [email protected] Juhana Kangaspunta Christopher Re´ [email protected] [email protected] Abstract This paper is organized as follows: first, we review the related work and give a general overview of DeepDive. Sec- Despite the tremendous amount of information on Wikipedia, ond, starting from the data preprocessing, we detail the gen- only a very small amount is structured. Most of the informa- eral methodology used. Then, we detail two applications tion is embedded in unstructured text and extracting it is a non trivial challenge. In this paper, we propose a full pipeline that follow this pipeline along with their specific challenges built on top of DeepDive to successfully extract meaningful and solutions. Finally, we report the results of these applica- relations from the Wikipedia text corpus. We evaluated the tions and discuss the next steps to continue populating Wiki- system by extracting company-founders and family relations data and improve the current system to extract more relations from the text. As a result, we extracted more than 140,000 with a high precision. distinct relations with an average precision above 90%. Background & Related Work Introduction Until recently, populating the large knowledge bases relied on direct contributions from human volunteers as well With the perpetual growth of web usage, the amount as integration of existing repositories such as Wikipedia of unstructured data grows exponentially. Extract- info boxes. These methods are limited by the available ing facts and assertions to store them in a struc- structured data and by human power. -

Expert Systems: an Introduction -46
GENERAL I ARTICLE Expert Systems: An Introduction K S R Anjaneyulu Expert systems encode human expertise in limited domains by representing it using if-then rules. This article explains the development and applications of expert systems. Introduction Imagine a piece of software that runs on your PC which provides the same sort of interaction and advice as a career counsellor helping you decide what education field to go into K S R Anjaneyulu is a and perhaps what course to pursue .. Or a piece of software Research Scientist in the Knowledge Based which asks you questions about your defective TV and provides Computer Systems Group a diagnosis about what is wrong with it. Such software, called at NeST. He is one of the expert systems, actually exist. Expert systems are a part of the authors of a book on rule larger area of Artificial Intelligence. based expert systems. One of the goals of Artificial Intelligence is to develop systems which exhibit 'intelligent' human-like behaviour. Initial attempts in the field (in the 1960s) like the General Problem Solver created by Allen Newell and Herbert Simon from Carnegie Mellon University were to create general purpose intelligent systems which could handle tasks in a variety of domains. However, researchers soon realized that developing such general purpose systems was too difficult and it was better to focus on systems for limited domains. Edward Feigenbaum from Stanford University then proposed the notion of expert systems. Expert systems are systems which encode human expertise in limited domains. One way of representing this human knowledge is using If-then rules. -
Racer - an Inference Engine for the Semantic Web
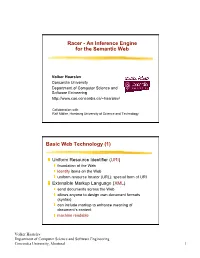
Racer - An Inference Engine for the Semantic Web Volker Haarslev Concordia University Department of Computer Science and Software Enineering http://www.cse.concordia.ca/~haarslev/ Collaboration with: Ralf Möller, Hamburg University of Science and Technology Basic Web Technology (1) Uniform Resource Identifier (URI) foundation of the Web identify items on the Web uniform resource locator (URL): special form of URI Extensible Markup Language (XML) send documents across the Web allows anyone to design own document formats (syntax) can include markup to enhance meaning of document’s content machine readable Volker Haarslev Department of Computer Science and Software Engineering Concordia University, Montreal 1 Basic Web Technology (2) Resource Description Framework (RDF) make machine-processable statements triple of URIs: subject, predicate, object intended for information from databases Ontology Web Language (OWL) based on RDF description logics (as part of automated reasoning) syntax is XML knowledge representation in the web What is Knowledge Representation? How would one argue that a person is an uncle? Jil We might describe family has_parent has_child relationships by a relation has_parent and its inverse has_child Joe Sue Now can can define an uncle a person (Joe) is an uncle if has_child and only if he is male he has a parent (Jil) and this ? parent has a second child this child (Sue) is itself a parent Sue is called a sibling of Joe and vice versa Volker Haarslev Department of Computer Science and Software Engineering Concordia University, -

First-Orderized Researchcyc: Expressivity and Efficiency in A
First-Orderized ResearchCyc : Expressivity and Efficiency in a Common-Sense Ontology Deepak Ramachandran1 Pace Reagan2 and Keith Goolsbey2 1Computer Science Department, University of Illinois at Urbana-Champaign, Urbana, IL 61801 [email protected] 2Cycorp Inc., 3721 Executive Center Drive, Suite 100, Austin, TX 78731 {pace,goolsbey}@cyc.com Abstract The second sentence is non-firstorderizable if we consider Cyc is the largest existing common-sense knowledge base. Its “anyone else” to mean anyone who was not in the group of ontology makes heavy use of higher-order logic constructs Fianchetto’s men who went into the warehouse. such as a context system, first class predicates, etc. Many Another reason for the use of these higher-order con- of these higher-order constructs are believed to be key to structs is the ability to represent knowledge succinctly and Cyc’s ability to represent common-sense knowledge and rea- in a form that can be taken advantage of by specialized rea- son with it efficiently. In this paper, we present a translation soning methods. The validation of this claim is one of the of a large part (around 90%) of the Cyc ontology into First- Order Logic. We discuss our methodology, and the trade- contributions of this paper. offs between expressivity and efficiency in representation and In this paper, we present a tool for translating a significant reasoning. We also present the results of experiments using percentage (around 90%) of the ResearchCyc KB into First- VAMPIRE, SPASS, and the E Theorem Prover on the first- Order Logic (a process we call FOLification). -

Semantic Web & Relative Analysis of Inference Engines
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 2 Issue 10, October - 2013 Semantic Web & Relative Analysis of Inference Engines Ravi L Verma 1, Prof. Arjun Rajput 2 1Information Technology, Technocrats Institute of Technology 2Computer Engineering, Technocrats Institute of Technology, Excellence Bhopal, MP Abstract - Semantic web is an enhancement to the reasoners to make logical conclusion based on the current web that will provide an easier path to find, framework. Use of inference engine in semantic web combine, share & reuse the information. It brings an allows the applications to investigate why a particular idea of having data to be defined & linked in a way that solution has been reached, i.e. semantic applications can can be used for more efficient discovery, integration, provide proof of the derived conclusion. This paper is a automation & reuse across many applications.Today’s study work & survey, which demonstrates a comparison web is purely based on documents that are written in of different type of inference engines in context of HTML, used for coding a body of text with interactive semantic web. It will help to distinguish among different forms. Semantic web provides a common language for inference engines which may be helpful to judge the understanding how data related to the real world various proposed prototype systems with different views objects, allowing a person or machine to start with in on what an inference engine for the semantic web one database and then move through an unending set of should do. databases that are not connected by wires but by being about the same thing. -

Toward a Logic of Everyday Reasoning
Toward a Logic of Everyday Reasoning Pei Wang Abstract: Logic should return its focus to valid reasoning in real-world situations. Since classical logic only covers valid reasoning in a highly idealized situation, there is a demand for a new logic for everyday reasoning that is based on more realistic assumptions, while still keeps the general, formal, and normative nature of logic. NAL (Non-Axiomatic Logic) is built for this purpose, which is based on the assumption that the reasoner has insufficient knowledge and resources with respect to the reasoning tasks to be carried out. In this situation, the notion of validity has to be re-established, and the grammar rules and inference rules of the logic need to be designed accordingly. Consequently, NAL has features very different from classical logic and other non-classical logics, and it provides a coherent solution to many problems in logic, artificial intelligence, and cognitive science. Keyword: non-classical logic, uncertainty, openness, relevance, validity 1 Logic and Everyday Reasoning 1.1 The historical changes of logic In a broad sense, the study of logic is concerned with the principles and forms of valid reasoning, inference, and argument in various situations. The first dominating paradigm in logic is Aristotle’s Syllogistic [Aristotle, 1882], now usually referred to as traditional logic. This study was carried by philosophers and logicians including Descartes, Locke, Leibniz, Kant, Boole, Peirce, Mill, and many others [Bochenski,´ 1970, Haack, 1978, Kneale and Kneale, 1962]. In this tra- dition, the focus of the study is to identify and to specify the forms of valid reasoning Pei Wang Department of Computer and Information Sciences, Temple University, Philadelphia, USA e-mail: [email protected] 1 2 Pei Wang in general, that is, the rules of logic should be applicable to all domains and situa- tions where reasoning happens, as “laws of thought”. -

A Knowledge-Based Approach to Network Security: Applying Cyc in the Domain of Network Risk Assessment
A Knowledge-Based Approach to Network Security: Applying Cyc in the Domain of Network Risk Assessment Blake Shepard, Cynthia Matuszek, C. Bruce Fraser, William Wechtenhiser, David Crabbe, Zelal Güngördü, John Jantos, Todd Hughes, Larry Lefkowitz, Michael Witbrock, Doug Lenat, Erik Larson Cycorp, Inc., 3721 Executive Center Drive, Suite 100, Austin, TX 78731 {blake, cynthia, dcrabbe, zelal, jantos, larry, witbrock, lenat}@cyc.com [email protected], [email protected], [email protected], [email protected] Abstract about what computers are on the network, what programs are installed or running on those computers, what privileges CycSecureTM is a network risk assessment and network monitoring the running programs have, what users are logged into the application that relies on knowledge-based artificial intelligence computers, how the parameters of critical operating system technologies to improve on traditional network vulnerability as- files are set, etc. The formal model is stored directly in the sessment. CycSecure integrates public reports of software faults KB, where it is accessible for inference and planning. This from online databases, data gathered automatically from computers on a network and hand-ontologized information about computers formal representation also allows users to interact directly and computer networks. This information is stored in the Cyc® with the model of the network using ontology editing tools, knowledge base (KB) and reasoned about by the Cyc inference allowing testing of proposed changes or corrections to the engine and planner to provide detailed analyses of the security (and network before implementation. vulnerability) of networks. CycSecure Server CycSecure Outputs Sentinels 1 Introduction Dynamic HTML User Interfaces Natural language (NL) descriptions of Network Model Network Attack Query network attack plans Statistics Plan In maintaining secure computer networks, system adminis- Editor Viewer Tool Tool Analyzer trators face an increasingly time-consuming task. -

The Design and Implementation of Ontology and Rules Based Knowledge Base for Transportation
THE DESIGN AND IMPLEMENTATION OF ONTOLOGY AND RULES BASED KNOWLEDGE BASE FOR TRANSPORTATION Gang Cheng, Qingyun Du School of Resources and Environment Sciences, Wuhan University, Wuhan, [email protected], [email protected] Commission WgS – PS: WG II/2 KEY WORDS: ontology rule, knowledge base reasoning, spatial relations, three-dimension transportation ABSTRACT: The traditional transportation information inquiry mainly uses key words based on the text, and the service the inquiry system provided is onefold and only aims at one transporting means. In addition, the inquiry system lacks the comprehensive transportation inquiry combining water, land and air traffic information; also it lacks semantic level inquiry, bringing users lots of inconvenience. In view of the above questions, we proposed establishing a knowledge base of transportation information based on the OWL ontologies and SWRL rules, which can express the rich semantic knowledge of three dimension transporting means (water, land and air) in formalization. Using the ontologies through kinds, properties, instances and classifications ontologies can express structure knowledge, support knowledge automatic sorting and the instance recognition, so as to provide formal semantics for the description of many concepts involved in the transportation domain and relations between these concepts. Using the SWRL rule can solve problem of insufficient expressivity of ontologies in properties association and operation to provide support for spatial relationships reasoning. In order to make use of these knowledge effectively, we have designed a reasoning system based on the ontologies and rules with the help of Protégé and its plug-ins. The system can eliminate ambiguity of the concepts and discover hidden information by reasoning, realizing knowledge and semantic level transportation information inquiry. -

Guiding Inference with Policy Search Reinforcement Learning Matthew E
Guiding Inference with Policy Search Reinforcement Learning Matthew E. Taylor Cynthia Matuszek, Pace Reagan Smith, and Michael Witbrock Department of Computer Sciences Cycorp, Inc. The University of Texas at Austin 3721 Executive Center Drive Austin, TX 78712-1188 Austin, TX 78731 [email protected] {cynthia,pace,witbrock}@cyc.com Abstract a learner about how efficiently it is able to respond to a set of training queries. Symbolic reasoning is a well understood and effective approach Our inference-learning method is implemented and tested to handling reasoning over formally represented knowledge; 1 however, simple symbolic inference systems necessarily slow within ResearchCyc, a freely available version of Cyc (Lenat as complexity and ground facts grow. As automated approaches 1995). We show that the speed of inference can be signif- to ontology-building become more prevalent and sophisticated, icantly improved over time when training on queries drawn knowledge base systems become larger and more complex, ne- from the Cyc knowledge base by effectively learning low- cessitating techniques for faster inference. This work uses re- level control laws. Additionally, the RL Tactician is also able inforcement learning, a statistical machine learning technique, to outperform Cyc’s built-in, hand-tuned tactician. to learn control laws which guide inference. We implement our Inference in Cyc learning method in ResearchCyc, a very large knowledge base with millions of assertions. A large set of test queries, some of Inference in Cyc is different from most inference engines be- which require tens of thousands of inference steps to answer, cause it was designed and optimized to work over a large can be answered faster after training over an independent set knowledge base with thousands of predicates and hundreds of training queries. -

Traditional Logic and Computational Thinking
philosophies Article Traditional Logic and Computational Thinking J.-Martín Castro-Manzano Faculty of Philosophy, UPAEP University, Puebla 72410, Mexico; [email protected] Abstract: In this contribution, we try to show that traditional Aristotelian logic can be useful (in a non-trivial way) for computational thinking. To achieve this objective, we argue in favor of two statements: (i) that traditional logic is not classical and (ii) that logic programming emanating from traditional logic is not classical logic programming. Keywords: syllogistic; aristotelian logic; logic programming 1. Introduction Computational thinking, like critical thinking [1], is a sort of general-purpose thinking that includes a set of logical skills. Hence logic, as a scientific enterprise, is an integral part of it. However, unlike critical thinking, when one checks what “logic” means in the computational context, one cannot help but be surprised to find out that it refers primarily, and sometimes even exclusively, to classical logic (cf. [2–7]). Classical logic is the logic of Boolean operators, the logic of digital circuits, the logic of Karnaugh maps, the logic of Prolog. It is the logic that results from discarding the traditional, Aristotelian logic in order to favor the Fregean–Tarskian paradigm. Classical logic is the logic that defines the standards we typically assume when we teach, research, or apply logic: it is the received view of logic. This state of affairs, of course, has an explanation: classical logic works wonders! However, this is not, by any means, enough warrant to justify the absence or the abandon of Citation: Castro-Manzano, J.-M. traditional logic within the computational thinking literature. -
Foundations of Artificial Intelligence
Foundations of Artificial Intelligence 2. Introduction: AI Past and Present Malte Helmert and Thomas Keller University of Basel February 19, 2020 A Short History of AI AI Systems Past and Present Summary Introduction: Overview Chapter overview: introduction 1. What is Artificial Intelligence? 2. AI Past and Present 3. Rational Agents 4. Environments and Problem Solving Methods A Short History of AI AI Systems Past and Present Summary A Short History of AI A Short History of AI AI Systems Past and Present Summary The Origins of AI Before AI, philosophy, mathematics, psychology and linguistics asked similar questions and influenced AI. Gestation of AI (∼1943{1956) With the advent of electrical computers, many asked: Can computers mimic the human mind? Turing test A Short History of AI AI Systems Past and Present Summary 60 Years of AI: 1950s Dartmouth workshop (1956): John McCarthy coins the term artificial intelligence “official birth year" of the research area early enthusiasm: Herbert Simon (1957) It is not my aim to surprise or shock you { but the simplest way I can summarize is to say that there are now in the world machines that think, that learn and that create. Moreover, their ability to do these things is going to increase rapidly until { in the visible future { the range of problems they can handle will be coextensive with the range to which the human mind has been applied. A Short History of AI AI Systems Past and Present Summary Early Enthusiasm: General Problem Solver (GPS) GPS: developed in 1957 by Herbert Simon and Allen Newell -

A Brief History and Technical Review of the Expert System Research
IOP Conference Series: Materials Science and Engineering PAPER • OPEN ACCESS Recent citations A brief history and technical review of the expert - Norizan Mat Diah et al system research - Machine Learning and Artificial Intelligence in Neurosurgery: Status, Prospects, and Challenges To cite this article: Haocheng Tan 2017 IOP Conf. Ser.: Mater. Sci. Eng. 242 012111 T Forcht Dagi et al - An expert system framework to support aircraft accident and incident investigations C.B.R. Ng et al View the article online for updates and enhancements. This content was downloaded from IP address 170.106.33.14 on 27/09/2021 at 05:56 ICAMMT 2017 IOP Publishing IOP Conf. Series: Materials Science and Engineering1234567890 242 (2017) 012111 doi:10.1088/1757-899X/242/1/012111 A brief history and technical review of the expert system research Haocheng Tan1, a) 1School of Information Science and Technology, University of Science and Technology of China, Hefei 230026, China a) [email protected] Abstract. The expert system is a computer system that emulates the decision-making ability of a human expert, which aims to solve complex problems by reasoning knowledge. It is an important branch of artificial intelligence. In this paper, firstly, we briefly introduce the development and basic structure of the expert system. Then, from the perspective of the enabling technology, we classify the current expert systems and elaborate four expert systems: The Rule- Based Expert System, the Framework-Based Expert System, the Fuzzy Logic-Based Expert System and the Expert System Based on Neural Network. 1. Introduction The expert system is a computer system that emulates the decision-making ability of a human expert, which aims to solve complex problems by reasoning knowledge.