Automated Detection and Mitigation of Inefficient Visual Searching Using Electroencephalography and Machine Learning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Working Memory Capacity and the Top-Down Control of Visual Search: Exploring the Boundaries of “Executive Attention”
Working Memory Capacity and the Top-Down Control of Visual Search: Exploring the Boundaries of “Executive Attention” By: Michael J. Kane, Bradley J. Poole, Stephen W. Tuholski, Randall W. Engle Kane, M.J., Poole, B.J., Tuholski, S.W., & Engle, R.W. (2006). Working memory capacity and the top-down control of visual search: Exploring the boundaries of ―executive attention.‖ Journal of Experimental Psychology: Learning, Memory, and Cognition, 32, 749-777. Made available courtesy of The American Psychological Association: http://www.apa.org/ *** Note: Figures may be missing from this format of the document Abstract: The executive attention theory of working memory capacity (WMC) proposes that measures of WMC broadly predict higher order cognitive abilities because they tap important and general attention capabilities (R. W. Engle & M. J. Kane, 2004). Previous research demonstrated WMC-related differences in attention tasks that required restraint of habitual responses or constraint of conscious focus. To further specify the executive attention construct, the present experiments sought boundary conditions of the WMC–attention relation. Three experiments correlated individual differences in WMC, as measured by complex span tasks, and executive control of visual search. In feature-absence search, conjunction search, and spatial configuration search, WMC was unrelated to search slopes, although they were large and reliably measured. Even in a search task designed to require the volitional movement of attention (J. M. Wolfe, G. A. Alvarez, & T. -

Modeling Saccadic Targeting in Visual Search
Modeling Saccadic Targeting in Visual Search Rajesh P. N. Rao Gregory J. Zelinsky Computer Science Department Center for Visual Science University of Rochester University of Rochester Rochester, NY 14627 Rochester, NY 14627 [email protected] [email protected] Mary M. Hayhoe Dana H. Ballard Center for Visual Science Computer Science Department University of Rochester University of Rochester Rochester, NY 14627 Rochester, NY 14627 [email protected] [email protected] Abstract Visual cognition depends criticalIy on the ability to make rapid eye movements known as saccades that orient the fovea over targets of interest in a visual scene. Saccades are known to be ballistic: the pattern of muscle activation for foveating a prespecified target location is computed prior to the movement and visual feedback is precluded. Despite these distinctive properties, there has been no general model of the saccadic targeting strategy employed by the human visual system during visual search in natural scenes. This paper proposes a model for saccadic targeting that uses iconic scene representations derived from oriented spatial filters at multiple scales. Visual search proceeds in a coarse-to-fine fashion with the largest scale filter responses being compared first. The model was empirically tested by comparing its perfonnance with actual eye movement data from human subjects in a natural visual search task; preliminary results indicate substantial agreement between eye movements predicted by the model and those recorded from human subjects. 1 INTRODUCTION Human vision relies extensively on the ability to make saccadic eye movements. These rapid eye movements, which are made at the rate of about three per second, orient the high-acuity foveal region of the eye over targets of interest in a visual scene. -

Visual Search in Alzheimer's Disease: a Deficiency in Processing
Neuropsychologia 40 (2002) 1849–1857 Visual search in Alzheimer’s disease: a deficiency in processing conjunctions of features A. Tales a,1, S.R. Butler a, J. Fossey b, I.D. Gilchrist c, R.W. Jones b, T. Troscianko d,∗ a Burden Neurological Institute, Frenchay Hospital, Bristol BS16 1 JB, UK b The Research Institute For The Care Of The Elderly, St. Martin’s Hospital, Bath BA2 5RP, UK c Department of Experimental Psychology, University of Bristol, 8 Woodland Road, Bristol BS8 1TN, UK d School of Cognitive and Computing Sciences, University of Sussex, Brighton BN1 9QH, UK Received 19 February 2001; received in revised form 20 May 2002; accepted 20 May 2002 Abstract Human vision often needs to encode multiple characteristics of many elements of the visual field, for example their lightness and orien- tation. The paradigm of visual search allows a quantitative assessment of the function of the underlying mechanisms. It measures the ability to detect a target element among a set of distractor elements. We asked whether Alzheimer’s disease (AD) patients are particularly affected in one type of search, where the target is defined by a conjunction of features (orientation and lightness) and where performance depends on some shifting of attention. Two non-conjunction control conditions were employed. The first was a pre-attentive, single-feature, “pop-out” task, detecting a vertical target among horizontal distractors. The second was a single-feature, partly attentive task in which the target element was slightly larger than the distractors—a “size” task. This was chosen to have a similar level of attentional load as the conjunction task (for the control group), but lacked the conjunction of two features. -

EEG Signatures of Contextual Influences on Visual Search With
bioRxiv preprint doi: https://doi.org/10.1101/2020.10.08.332247; this version posted October 9, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. 1 EEG signatures of contextual influences on visual 2 search with real scenes 3 4 Abbreviated title: EEG signatures of scene context in visual search 5 Author names and affiliations: 6 Amir H. Meghdadi1,2, Barry Giesbrecht1,2,3, Miguel P Eckstein1,2,3 7 1Department of Psychological and Brain Sciences, University of California, Santa Barbara, Santa 8 Barbara, CA, 93106-9660 9 2Institute for Collaborative Biotechnologies, University of California, Santa Barbara, Santa 10 Barbara, CA, 93106-5100 11 3Interdepartmental Graduate Program in Dynamical Neuroscience, University of California, 12 Santa Barbara, Santa Barbara, CA, 93106-5100 13 Corresponding author: 14 Amir H. Meghdadi ([email protected]) 15 1Department of Psychological and Brain Sciences, University of California, Santa Barbara, Santa 16 Barbara, C, 93106-9660 17 18 Number of pages: 26 excluding Figures 19 Number of figures: 11 20 Number of tables: 1 21 Number of words in total excluding abstract (n=4747), abstract (n= 222), introduction (n=668) 22 and discussion (n=1048) 23 Keywords: EEG, ssVEP, visual search 24 Acknowledgments: 25 The first author is currently with Advanced Brain Monitoring Inc, Carlsbad, CA, 92008 26 1 bioRxiv preprint doi: https://doi.org/10.1101/2020.10.08.332247; this version posted October 9, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. -

Visual Search Is Guided by Prospective and Retrospective Memory
Perception & Psychophysics 2007, 69 (1), 123-135 Visual search is guided by prospective and retrospective memory MATTHEW S. PETERSON, MELIssA R. BECK, AND MIROSLAVA VOMELA George Mason University, Fairfax, Virginia Although there has been some controversy as to whether attention is guided by memory during visual search, recent findings have suggested that memory helps to prevent attention from needlessly reinspecting examined items. Until now, it has been assumed that some form of retrospective memory is responsible for keeping track of examined items and preventing revisitations. Alternatively, some form of prospective memory, such as stra- tegic scanpath planning, could be responsible for guiding attention away from examined items. We used a new technique that allowed us to selectively prevent retrospective or prospective memory from contributing to search. We demonstrated that both retrospective and prospective memory guide attention during visual search. When we search the environment, we often have some could involve planning a series of shifts to specific objects idea of what we are looking for, and through top-down or something as mundane as searching in a clockwise pat- guidance, attention is attracted to items that closely match tern. This strategic planning could prevent revisitations, the description of the search target (Treisman & Gormi- even in the absence of retrospective memory (Gilchrist & can, 1988; Wolfe, 1994). Even without a goal in mind, Harvey, 2006; Zingale & Kowler, 1987). attention does not flail around aimlessly. Instead, atten- Until recently, the potential contribution of prospective tion is attracted to the most salient visible items—namely, memory to search had been largely ignored. Employing a items that differ from other items in the environment, novel task that prevented the planning of more than one especially when they are different from their immediate saccade in advance, McCarley et al. -
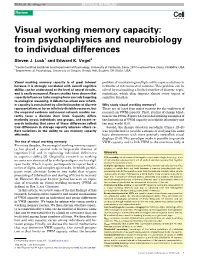
Visual Working Memory Capacity: from Psychophysics and Neurobiology to Individual Differences
TICS-1215; No. of Pages 10 Review Visual working memory capacity: from psychophysics and neurobiology to individual differences 1 2 Steven J. Luck and Edward K. Vogel 1 Center for Mind and Brain and Department of Psychology, University of California, Davis, 267 Cousteau Place, Davis, CA 95618, USA 2 Department of Psychology, University of Oregon, Straub Hall, Eugene, OR 97403, USA Visual working memory capacity is of great interest problem of maintaining multiple active representations in because it is strongly correlated with overall cognitive networks of interconnected neurons. This problem can be ability, can be understood at the level of neural circuits, solved by maintaining a limited number of discrete repre- and is easily measured. Recent studies have shown that sentations, which then impacts almost every aspect of capacity influences tasks ranging from saccade targeting cognitive function. to analogical reasoning. A debate has arisen over wheth- er capacity is constrained by a limited number of discrete Why study visual working memory? representations or by an infinitely divisible resource, but There are at least four major reasons for the explosion of the empirical evidence and neural network models cur- research on VWM capacity. First, studies of change blind- rently favor a discrete item limit. Capacity differs ness in the 1990s (Figure 1A) provided striking examples of markedly across individuals and groups, and recent re- the limitations of VWM capacity in both the laboratory and search indicates that some of these differences reflect the real world [5,6]. true differences in storage capacity whereas others re- Second, the change detection paradigm (Figure 1B–D) flect variations in the ability to use memory capacity was popularized to provide a means of studying the same efficiently. -

The Cognitive and Neural Basis of Developmental Prosopagnosia
The Quarterly Journal of Experimental Psychology ISSN: 1747-0218 (Print) 1747-0226 (Online) Journal homepage: http://www.tandfonline.com/loi/pqje20 The cognitive and neural basis of developmental prosopagnosia John Towler, Katie Fisher & Martin Eimer To cite this article: John Towler, Katie Fisher & Martin Eimer (2017) The cognitive and neural basis of developmental prosopagnosia, The Quarterly Journal of Experimental Psychology, 70:2, 316-344, DOI: 10.1080/17470218.2016.1165263 To link to this article: http://dx.doi.org/10.1080/17470218.2016.1165263 Accepted author version posted online: 11 Mar 2016. Published online: 27 Apr 2016. Submit your article to this journal Article views: 163 View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=pqje20 Download by: [Birkbeck College] Date: 15 November 2016, At: 07:22 THE QUARTERLY JOURNAL OF EXPERIMENTAL PSYCHOLOGY, 2017 VOL. 70, NO. 2, 316–344 http://dx.doi.org/10.1080/17470218.2016.1165263 The cognitive and neural basis of developmental prosopagnosia John Towler, Katie Fisher and Martin Eimer Department of Psychological Sciences, Birkbeck College, University of London, London, UK ABSTRACT ARTICLE HISTORY Developmental prosopagnosia (DP) is a severe impairment of visual face recognition Received 28 July 2015 in the absence of any apparent brain damage. The factors responsible for DP have not Accepted 1 February 2016 yet been fully identified. This article provides a selective review of recent studies First Published Online 27 investigating cognitive and neural processes that may contribute to the face April 2016 fi recognition de cits in DP, focusing primarily on event-related brain potential (ERP) KEYWORDS measures of face perception and recognition. -

Applying the Flanker Task to Political Psychology: a Research Note
bs_bs_banner Political Psychology, Vol. xx, No. xx, 2013 doi: 10.1111/pops.12056 Applying the Flanker Task to Political Psychology: A Research Note Scott P. McLean University of Delaware John P. Garza University of Nebraska-Lincoln Sandra A. Wiebe University of Alberta Michael D. Dodd University of Nebraska-Lincoln Kevin B. Smith University of Nebraska-Lincoln John R. Hibbing University of Nebraska-Lincoln Kimberly Andrews Espy University of Oregon One of the two stated objectives of the new “Research Note” section of Political Psychology is to present short reports that highlight novel methodological approaches. Toward that end, we call readers’ attention to the “flanker task,” a research protocol widely employed in the study of the cognitive processes involved with detection, recognition, and distraction. The flanker task has increasingly been modified to study social traits, and we believe it has untapped value in the area of political psychology. Here we describe the flanker task—discussing its potential for political psychology—and illustrate this potential by presenting results from a study correlating political ideology to flanker effects. KEY WORDS: attention, flanker task, liberals conservatives, emotions Imagine you were given the assignment of identifying some feature of a still image appearing in the center of a computer screen—a letter, a number, or the direction an arrow is pointing. Now imagine conducting this task when additional letters, numbers, or arrows are placed on each side of the central, target image. These “flanking” images are sometimes congruent with that target image 1 0162-895X © 2013 International Society of Political Psychology Published by Wiley Periodicals, Inc., 350 Main Street, Malden, MA 02148, USA, 9600 Garsington Road, Oxford, OX4 2DQ, and PO Box 378 Carlton South, 3053 Victoria, Australia 2 McLean et al. -

At First Sight: a High-Level Pop out Effect for Faces
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Vision Research 45 (2005) 1707–1724 www.elsevier.com/locate/visres At first sight: A high-level pop out effect for faces Orit Hershler, Shaul Hochstein * Neurobiology Department, Institute of Life Sciences and Center for Neural Computation, Hebrew University, Jerusalem 91904, Israel Received 23 February 2004; received in revised form 9 December 2004 Abstract To determine the nature of face perception, several studies used the visual search paradigm, whereby subjects detect an odd target among distractors. When detection reaction time is set-size independent, the odd element is said to ‘‘pop out’’, reflecting a basic mechanism or map for the relevant feature. A number of previous studies suggested that schematic faces do not pop out. We show that natural face stimuli do pop out among assorted non-face objects. Animal faces, on the other hand, do not pop out from among the same assorted non-face objects. In addition, search for a face among distractors of another object category is easier than the reverse search, and face search is mediated by holistic face characteristics, rather than by face parts. Our results indicate that the association of pop out with elementary features and lower cortical areas may be incorrect. Instead, face search, and indeed all fea- ture search, may reflect high-level activity with generalization over spatial and other property details. Ó 2005 Elsevier Ltd. All rights reserved. Keywords: Visual; Search; Face; Detection; Asymmetry 1. Introduction & James, 1967). Numerous brain studies imply the exis- tence of specific face recognition units and areas within The human face is one of the most important object the brain, including single cell recordings in monkey categories that we recognize and numerous studies sug- (infero-temporal cortex; Perrett, Rolls, & Caan, 1982), gest a unique processing mechanism within our visual human fMRI brain scans (the fusiform face area, system. -

Improvement in Visual Search with Practice: Mapping Learning-Related Changes in Neurocognitive Stages of Processing
The Journal of Neuroscience, April 1, 2015 • 35(13):5351–5359 • 5351 Behavioral/Cognitive Improvement in Visual Search with Practice: Mapping Learning-Related Changes in Neurocognitive Stages of Processing Kait Clark,1,3 L. Gregory Appelbaum,1,4 Berry van den Berg,1,5 Stephen R. Mitroff,1,2 and Marty G. Woldorff1,2,4 1Center for Cognitive Neuroscience and 2Department of Psychology and Neuroscience, Duke University, Durham, North Carolina 27708, 3School of Psychology, Cardiff University, Cardiff CF10 3AT, United Kingdom, 4Department of Psychiatry, Duke University Medical Center, Durham, North Carolina 27708, and 5BCN Neuroimaging Center, University of Groningen, 9700 AB Groningen, The Netherlands Practice can improve performance on visual search tasks; the neural mechanisms underlying such improvements, however, are not clear. Response time typically shortens with practice, but which components of the stimulus–response processing chain facilitate this behav- ioral change? Improved search performance could result from enhancements in various cognitive processing stages, including (1) sensory processing, (2) attentional allocation, (3) target discrimination, (4) motor-response preparation, and/or (5) response execution. We measured event-related potentials (ERPs) as human participants completed a five-day visual-search protocol in which they reported the orientation of a color popout target within an array of ellipses. We assessed changes in behavioral performance and in ERP compo- nents associated with various stages of processing. After practice, response time decreased in all participants (while accuracy remained consistent), and electrophysiological measures revealed modulation of several ERP components. First, amplitudes of the early sensory- evoked N1 component at 150 ms increased bilaterally, indicating enhanced visual sensory processing of the array. -
Electrophysiological Correlates of Visual Search in the Autism Spectrum
Electrophysiological Correlates of Visual Search in the Autism Spectrum Stephanie Dunn A thesis submitted for the degree of Doctor of Philosophy (PhD) The University of Sheffield Department of Psychology March 2016 Publications arising from this thesis: Dunn, S.A., Freeth, M., & Milne, E. (2016). Electrophysiological evidence of atypical spatial attention in those with a high level of self-reported autistic traits. Journal of Autism and Developmental Disorders, 46(6), 2199-2210. i Contents Chapter 1 : Selective Attention and the Autism Spectrum ........................................................ 1 Autism Spectrum Conditions ................................................................................... 1 Autistic Traits in the Typically Developed Population ........................................ 2 Theories of ASC ....................................................................................................... 3 Weak Central Coherence ...................................................................................... 3 Enhanced Discrimination and Reduced Generalisation........................................ 4 Enhanced Perceptual Functioning ........................................................................ 4 Enhanced Perceptual Capacity .............................................................................. 5 Neural Under-Connectivity................................................................................... 5 Selective Attention in ASC ..................................................................................... -

Guidance of Attention by Working Memory Is a Matter of Representational Fidelity
Guidance of attention by working memory is a matter of representational fidelity Jamal R. Williams1, Timothy F. Brady1, & Viola S. Störmer1,2 1. Department of Psychology, University of California, San Diego 2. Department of Psychological and Brain Sciences, Dartmouth College Word Count: 14960 Please address correspondence to: Jamal R. Williams Department of Psychology University of California, San Diego 9500 Gilman Drive #0109 La Jolla, CA, 92093 Email: [email protected] Memory fidelity drives guidance Abstract Items that are held in visual working memory can guide attention towards matching features in the environment. Predominant theories propose that to guide attention, a memory item must be internally prioritized and given a special template status, which builds on the assumption that there are qualitatively distinct states in working memory. Here, we propose that no distinct states in working memory are necessary to explain why some items guide attention and others do not. Instead, we propose variations in attentional guidance arise because individual memories naturally vary in their representational fidelity, and only highly accurate memories automatically guide attention. Across a series of experiments and a simulation we show that (1) items in working memory vary naturally in representational fidelity; (2) attention is guided by all well-represented items, though frequently only one item is represented well enough to guide; and (3) no special working memory state for prioritized items is necessary to explain guidance. These findings challenge current models of attentional guidance and working memory and instead support a simpler account for how working memory and attention interact: only the representational fidelity of memories, which varies naturally between items, determines whether and how strongly a memory representation guides attention.