Deadlock Avoidance for Distributed Real-Time and Embedded Systems
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

An Aggregate Computing Approach to Self-Stabilizing Leader Election
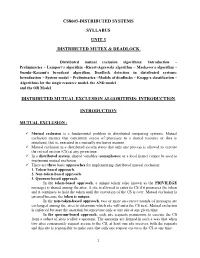
An Aggregate Computing Approach to Self-Stabilizing Leader Election Yuanqiu Mo Jacob Beal Soura Dasgupta University of Iowa Raytheon BBN Technologies University of Iowa⇤ Iowa City, Iowa 52242 Cambridge, MA, USA 02138 Iowa City, Iowa 52242 Email: [email protected] Email: [email protected] Email: [email protected] Abstract—Leader election is one of the core coordination 4" problems of distributed systems, and has been addressed in 3" 1" many different ways suitable for different classes of systems. It is unclear, however, whether existing methods will be effective 7" 1" for resilient device coordination in open, complex, networked 3" distributed systems like smart cities, tactical networks, personal 3" 0" networks and the Internet of Things (IoT). Aggregate computing 2" provides a layered approach to developing such systems, in which resilience is provided by a layer comprising a set of (a) G block (b) C block (c) T block adaptive algorithms whose compositions have been shown to cover a large class of coordination activities. In this paper, Fig. 1. Illustration of three basis block operators: (a) information-spreading (G), (b) information aggregation (C), and (c) temporary state (T) we show how a feedback interconnection of these basis set algorithms can perform distributed leader election resilient to device topology and position changes. We also characterize a key design parameter that defines some important performance a separation of concerns into multiple abstraction layers, much attributes: Too large a value impairs resilience to loss of existing like the OSI model for communication [2], factoring the leaders, while too small a value leads to multiple leaders. -

NUMA-Aware Thread Migration for High Performance NVMM File Systems
NUMA-Aware Thread Migration for High Performance NVMM File Systems Ying Wang, Dejun Jiang and Jin Xiong SKL Computer Architecture, ICT, CAS; University of Chinese Academy of Sciences fwangying01, jiangdejun, [email protected] Abstract—Emerging Non-Volatile Main Memories (NVMMs) out considering the NVMM usage on NUMA nodes. Besides, provide persistent storage and can be directly attached to the application threads accessing file system rely on the default memory bus, which allows building file systems on non-volatile operating system thread scheduler, which migrates thread only main memory (NVMM file systems). Since file systems are built on memory, NUMA architecture has a large impact on their considering CPU utilization. These bring remote memory performance due to the presence of remote memory access and access and resource contentions to application threads when imbalanced resource usage. Existing works migrate thread and reading and writing files, and thus reduce the performance thread data on DRAM to solve these problems. Unlike DRAM, of NVMM file systems. We observe that when performing NVMM introduces extra latency and lifetime limitations. This file reads/writes from 4 KB to 256 KB on a NVMM file results in expensive data migration for NVMM file systems on NUMA architecture. In this paper, we argue that NUMA- system (NOVA [47] on NVMM), the average latency of aware thread migration without migrating data is desirable accessing remote node increases by 65.5 % compared to for NVMM file systems. We propose NThread, a NUMA-aware accessing local node. The average bandwidth is reduced by thread migration module for NVMM file system. -

A Theory of Fault Recovery for Component-Based Models⋆
A Theory of Fault Recovery for Component-based Models? Borzoo Bonakdarpour1, Marius Bozga2, and Gregor G¨ossler3 1 School of Computer Science, University of Waterloo Email: [email protected] 2 VERIMAG/CNRS, Gieres, France Email: [email protected] 3 INRIA-Grenoble, Montbonnot, France Email: [email protected] Abstract. This paper introduces a theory of fault recovery for component- based models. We specify a model in terms of a set of atomic components incrementally composed and synchronized by a set of glue operators. We define what it means for such models to provide a recovery mechanism, so that the model converges to its normal behavior in the presence of faults (e.g., in self-stabilizing systems). We present a sufficient condition for in- crementally composing components to obtain models that provide fault recovery. We identify corrector components whose presence in a model is essential to guarantee recovery after the occurrence of faults. We also for- malize component-based models that effectively separate recovery from functional concerns. We also show that any model that provides fault recovery can be transformed into an equivalent model, where functional and recovery tasks are modularized in different components. Keywords: Fault-tolerance; Transformation; Separation of concerns; BIP 1 Introduction Fault-tolerance has always been an active line of research in design and imple- mentation of dependable systems. Intuitively, tolerating faults involves providing a system with the means to handle unexpected defects, so that the system meets its specification even in the presence of faults. In this context, the notion of spec- ification may vary depending upon the guarantees that the system must deliver in the presence of faults. -
Cs8603-Distributed Systems Syllabus Unit 3 Distributed Mutex & Deadlock Distributed Mutual Exclusion Algorithms: Introducti
CS8603-DISTRIBUTED SYSTEMS SYLLABUS UNIT 3 DISTRIBUTED MUTEX & DEADLOCK Distributed mutual exclusion algorithms: Introduction – Preliminaries – Lamport‘s algorithm –Ricart-Agrawala algorithm – Maekawa‘s algorithm – Suzuki–Kasami‘s broadcast algorithm. Deadlock detection in distributed systems: Introduction – System model – Preliminaries –Models of deadlocks – Knapp‘s classification – Algorithms for the single resource model, the AND model and the OR Model DISTRIBUTED MUTUAL EXCLUSION ALGORITHMS: INTRODUCTION INTRODUCTION MUTUAL EXCLUSION : Mutual exclusion is a fundamental problem in distributed computing systems. Mutual exclusion ensures that concurrent access of processes to a shared resource or data is serialized, that is, executed in a mutually exclusive manner. Mutual exclusion in a distributed system states that only one process is allowed to execute the critical section (CS) at any given time. In a distributed system, shared variables (semaphores) or a local kernel cannot be used to implement mutual exclusion. There are three basic approaches for implementing distributed mutual exclusion: 1. Token-based approach. 2. Non-token-based approach. 3. Quorum-based approach. In the token-based approach, a unique token (also known as the PRIVILEGE message) is shared among the sites. A site is allowed to enter its CS if it possesses the token and it continues to hold the token until the execution of the CS is over. Mutual exclusion is ensured because the token is unique. In the non-token-based approach, two or more successive rounds of messages are exchanged among the sites to determine which site will enter the CS next. Mutual exclusion is enforced because the assertion becomes true only at one site at any given time. -
Resource Access Control in Real-Time Systems
Resource Access Control in Real-time Systems Advanced Operating Systems (M) Lecture 8 Lecture Outline • Definitions of resources • Resource access control for static systems • Basic priority inheritance protocol • Basic priority ceiling protocol • Enhanced priority ceiling protocols • Resource access control for dynamic systems • Effects on scheduling • Implementing resource access control 2 Resources • A system has ρ types of resource R1, R2, …, Rρ • Each resource comprises nk indistinguishable units; plentiful resources have no effect on scheduling and so are ignored • Each unit of resource is used in a non-preemptive and mutually exclusive manner; resources are serially reusable • If a resource can be used by more than one job at a time, we model that resource as having many units, each used mutually exclusively • Access to resources is controlled using locks • Jobs attempt to lock a resource before starting to use it, and unlock the resource afterwards; the time the resource is locked is the critical section • If a lock request fails, the requesting job is blocked; a job holding a lock cannot be preempted by a higher priority job needing that lock • Critical sections may nest if a job needs multiple simultaneous resources 3 Contention for Resources • Jobs contend for a resource if they try to lock it at once J blocks 1 Preempt J3 J1 Preempt J3 J2 blocks J2 J3 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Priority inversion EDF schedule of J1, J2 and J3 sharing a resource protected by locks (blue shading indicated critical sections). -

Separation of Concerns in Multi-Language Specifications
INFORMATICA, 2002, Vol. 13, No. 3, 255–274 255 2002 Institute of Mathematics and Informatics, Vilnius Separation of Concerns in Multi-language Specifications Robertas DAMAŠEVICIUS,ˇ Vytautas ŠTUIKYS Software Engineering Department, Kaunas University of Technology Student¸u 50, 3031 Kaunas, Lithuania e-mail: [email protected], [email protected] Received: April 2002 Abstract. We present an analysis of the separation of concerns in multi-language design and multi- language specifications. The basis for our analysis is the paradigm of the multi-dimensional sepa- ration of concerns, which claims that multiple dimensions of concerns in a design should be imple- mented independently. Multi-language specifications are specifications where different concerns of a design are implemented using separate languages as follows. (1) Target language(s) implement domain functionality. (2) External (or scripting, meta-) language(s) implement generalisation of the repetitive design features, introduce variations, and integrate components into a design. We present case studies and experimental results for the application of the multi-language specifications in hardware design. Key words: multi-language design, separation of concerns, meta-programming, scripting, hardwa- re design. 1. Introduction Today the high-level design of a hardware (HW) system is usually based either on the usage of the pure HW description language (HDL) (e.g., VHDL, Verilog), or the algo- rithmic one (e.g., C++, SystemC), or both. The emerging problems are similar for both, the HW and software (SW) domains. For example, the increasing complexity of SW and HW designs urges the designers and researchers to seek for the new design methodolo- gies. -

Memory and Cache Contention Denial-Of-Service Attack in Mobile Edge Devices
applied sciences Article Memory and Cache Contention Denial-of-Service Attack in Mobile Edge Devices Won Cho and Joonho Kong * School of Electronic and Electrical Engineering, Kyungpook National University, Daegu 41566, Korea; [email protected] * Correspondence: [email protected] Abstract: In this paper, we introduce a memory and cache contention denial-of-service attack and its hardware-based countermeasure. Our attack can significantly degrade the performance of the benign programs by hindering the shared resource accesses of the benign programs. It can be achieved by a simple C-based malicious code while degrading the performance of the benign programs by 47.6% on average. As another side-effect, our attack also leads to greater energy consumption of the system by 2.1× on average, which may cause shorter battery life in the mobile edge devices. We also propose detection and mitigation techniques for thwarting our attack. By analyzing L1 data cache miss request patterns, we effectively detect the malicious program for the memory and cache contention denial-of-service attack. For mitigation, we propose using instruction fetch width throttling techniques to restrict the malicious accesses to the shared resources. When employing our malicious program detection with the instruction fetch width throttling technique, we recover the system performance and energy by 92.4% and 94.7%, respectively, which means that the adverse impacts from the malicious programs are almost removed. Keywords: memory and cache contention; denial of service attack; shared resources; performance; en- Citation: Cho, W.; Kong, J. Memory ergy and Cache Contention Denial-of-Service Attack in Mobile Edge Devices. -

A Case for NUMA-Aware Contention Management on Multicore Systems
A Case for NUMA-aware Contention Management on Multicore Systems Sergey Blagodurov Sergey Zhuravlev Mohammad Dashti Simon Fraser University Simon Fraser University Simon Fraser University Alexandra Fedorova Simon Fraser University Abstract performance of individual applications or threads by as much as 80% and the overall workload performance by On multicore systems, contention for shared resources as much as 12% [23]. occurs when memory-intensive threads are co-scheduled Unfortunately studies of contention-aware algorithms on cores that share parts of the memory hierarchy, such focused primarily on UMA (Uniform Memory Access) as last-level caches and memory controllers. Previous systems, where there are multiple shared LLCs, but only work investigated how contention could be addressed a single memory node equipped with the single memory via scheduling. A contention-aware scheduler separates controller, and memory can be accessed with the same competing threads onto separate memory hierarchy do- latency from any core. However, new multicore sys- mains to eliminate resource sharing and, as a conse- tems increasingly use the Non-Uniform Memory Access quence, to mitigate contention. However, all previous (NUMA) architecture, due to its decentralized and scal- work on contention-aware scheduling assumed that the able nature. In modern NUMA systems, there are mul- underlying system is UMA (uniform memory access la- tiple memory nodes, one per memory domain (see Fig- tencies, single memory controller). Modern multicore ure 1). Local nodes can be accessed in less time than re- systems, however, are NUMA, which means that they mote ones, and each node has its own memory controller. feature non-uniform memory access latencies and multi- When we ran the best known contention-aware sched- ple memory controllers. -

Thread Evolution Kit for Optimizing Thread Operations on CE/Iot Devices
Thread Evolution Kit for Optimizing Thread Operations on CE/IoT Devices Geunsik Lim , Student Member, IEEE, Donghyun Kang , and Young Ik Eom Abstract—Most modern operating systems have adopted the the threads running on CE/IoT devices often unintentionally one-to-one thread model to support fast execution of threads spend a significant amount of time in taking the CPU resource in both multi-core and single-core systems. This thread model, and the frequency of context switch rapidly increases due to which maps the kernel-space and user-space threads in a one- to-one manner, supports quick thread creation and termination the limited system resources, degrading the performance of in high-performance server environments. However, the perfor- the system significantly. In addition, since CE/IoT devices mance of time-critical threads is degraded when multiple threads usually have limited memory space, they may suffer from the are being run in low-end CE devices with limited system re- segmentation fault [16] problem incurred by memory shortages sources. When a CE device runs many threads to support diverse as the number of threads increases and they remain running application functionalities, low-level hardware specifications often lead to significant resource contention among the threads trying for a long time. to obtain system resources. As a result, the operating system Some engineers have attempted to address the challenges encounters challenges, such as excessive thread context switching of IoT environments such as smart homes by using better overhead, execution delay of time-critical threads, and a lack of hardware specifications for CE/IoT devices [3], [17]–[21]. -
Computer Architecture Lecture 12: Memory Interference and Quality of Service
Computer Architecture Lecture 12: Memory Interference and Quality of Service Prof. Onur Mutlu ETH Zürich Fall 2017 1 November 2017 Summary of Last Week’s Lectures n Control Dependence Handling q Problem q Six solutions n Branch Prediction n Trace Caches n Other Methods of Control Dependence Handling q Fine-Grained Multithreading q Predicated Execution q Multi-path Execution 2 Agenda for Today n Shared vs. private resources in multi-core systems n Memory interference and the QoS problem n Memory scheduling n Other approaches to mitigate and control memory interference 3 Quick Summary Papers n "Parallelism-Aware Batch Scheduling: Enhancing both Performance and Fairness of Shared DRAM Systems” n "The Blacklisting Memory Scheduler: Achieving High Performance and Fairness at Low Cost" n "Staged Memory Scheduling: Achieving High Performance and Scalability in Heterogeneous Systems” n "Parallel Application Memory Scheduling” n "Reducing Memory Interference in Multicore Systems via Application-Aware Memory Channel Partitioning" 4 Shared Resource Design for Multi-Core Systems 5 Memory System: A Shared Resource View Storage 6 Resource Sharing Concept n Idea: Instead of dedicating a hardware resource to a hardware context, allow multiple contexts to use it q Example resources: functional units, pipeline, caches, buses, memory n Why? + Resource sharing improves utilization/efficiency à throughput q When a resource is left idle by one thread, another thread can use it; no need to replicate shared data + Reduces communication latency q For example, -

Multi-Dimensional Concerns in Parallel Program Design
Multi-Dimensional Concerns in Parallel Program Design Parallel programming is difficult, thus design patterns. Despite rapid advances in parallel hardware performance, the full potential of processing power is not being exploited in the community for one clear reason: difficulty of designing parallel software. Identifying tasks, designing parallel algorithm, and managing the balanced load among the processing units has been a daunting task for novice programmers, and even the experienced programmers are often trapped with design decisions that underachieve in potential peak performance. Over the last decade there have been several approaches in identifying common patterns that are repeatedly used in parallel software design process. Documentation of these “design patterns” helps the programmers by providing definition, solution and guidelines for common parallelization problems. Such patterns can take the form of templates in software tools, written paragraphs with detailed description, or even charts, diagrams and examples. The current parallel patterns prove to be ineffective. In practice, however, the parallel design patterns identified thus far [over the last two decades!] contribute little—if none at all—to development of non-trivial parallel software. In short, the parallel design patterns are too trivial and fail to give detailed guidelines for specific parameters that can affect the performance of wide range of complex problem requirements. By experience in the community, it is coming to a consensus that there are only limited number of patterns; namely pipeline, master & slave, divide & conquer, geometric, replicable, repository, and not many more. So far the community efforts were focused on discovering more design patterns, but new patterns vary a little and fall into range that is not far from one of the patterns mentioned above. -

Using Architectural Styles in Design the Nature of Computation the Quality Concerns
Which Architectural Style should be used? The selection of software architectural style should take into consideration of two factors: Using Architectural Styles in Design The nature of computation The quality concerns Lecture 6 U08182 © Peter Lo 2010 1 U08182 © Peter Lo 2010 2 In this lecture you will learn: The selection of software architectural style should take into consideration of two • Use of software architectural styles in design factors: • Selection of appropriate architectural style • The nature of the computation problem to be solved. e.g. the input/output data structure and features, the required functions of the system, etc. • Combinations of styles • The quality concerns that the design of the system must take into • Case studies consideration, such as performance, reliability, security, maintenance, reuse, • Case study 1: Keyword Frequency Vector (KFV) modification, interoperability, etc. • Case study 2: Keyword in Context (KWIC) 1 2 Characteristic Features of Architectural Behavioral Features of Architectural Styles Styles Control Topology Synchronicity Data Topology Data Access Mode Control/Data Interaction Topology Data Flow Continuity Control/Data Interaction Direction Binding Time U08182 © Peter Lo 2010 3 U08182 © Peter Lo 2010 4 Control Topology: Synchronicity: • How dependent are the components' action upon each other's control state? • What geometric form does the control flow for the systems of the style take? • Lockstep – One component's state implies the other component's state. • E.g. In the main-program-and-subroutine style, components must be organized must • Synchronous – Components synchronies at certain states to make sure they are in the be organized into a hierarchical structure. synchronized states at the same time in order to cooperate, but the relationships on other states are not predictable.