Optimal Estimation of States in Quantum Image Processing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Quantum Computing
International Journal of Information Science and System, 2018, 6(1): 21-27 International Journal of Information Science and System ISSN: 2168-5754 Journal homepage: www.ModernScientificPress.com/Journals/IJINFOSCI.aspx Florida, USA Article Quantum Computing Adfar Majid*, Habron Rasheed Department of Electrical Engineering, SSM College of Engineering & Technology, Parihaspora, Pattan, J&K, India, 193121 * Author to whom correspondence should be addressed; E-Mail: [email protected] . Article history: Received 26 September 2018, Revised 2 November 2018, Accepted 10 November 2018, Published 21 November 2018 Abstract: Quantum Computing employs quantum phenomenon such as superposition and entanglement for computing. A quantum computer is a device that physically realizes such computing technique. They are different from ordinary digital electronic computers based on transistors that are vastly used today in a sense that common digital computing requires the data to be encoded into binary digits (bits), each of which is always in one of two definite states (0 or 1), whereas quantum computation uses quantum bits, which can be in superposition of states. The field of quantum computing was initiated by the work of Paul Benioff and Yuri Manin in 1980, Richard Feynman in 1982, and David Deutsch in 1985. Quantum computers are incredibly powerful machines that take this new approach to processing information. As such they exploit complex and fascinating laws of nature that are always there, but usually remain hidden from view. By harnessing such natural behavior (of qubits), quantum computing can run new, complex algorithms to process information more holistically. They may one day lead to revolutionary breakthroughs in materials and drug discovery, the optimization of complex manmade systems, and artificial intelligence. -

Quantum Spectral Analysis: Frequency in Time Mario Mastriani
Quantum spectral analysis: frequency in time Mario Mastriani To cite this version: Mario Mastriani. Quantum spectral analysis: frequency in time. 2017. hal-01655209v1 HAL Id: hal-01655209 https://hal.inria.fr/hal-01655209v1 Preprint submitted on 4 Dec 2017 (v1), last revised 26 Dec 2018 (v3) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Quantum spectral analysis: frequency at time Mario Mastriani Quantum Communications Group, Merxcomm LLC, 2875 NE 191 st, suite 801, Aventura, FL 33180, USA [email protected] Abstract A quantum time-dependent spectrum analysis, or simply, quantum spectral analysis (QuSA) is presented in this work, and it’s based on Schrödinger equation, which is a partial differential equation that describes how the quantum state of a non-relativistic physical system changes with time. In classic world is named frequency at time (FAT), which is presented here in opposition and as a complement of traditional spectral analysis frequency-dependent based on Fourier theory. Besides, FAT is a metric, which assesses the impact of the flanks of a signal on its frequency spectrum, which is not taken into account by Fourier theory and even less in real time. -
![Arxiv:2006.08747V1 [Quant-Ph] 15 Jun 2020 Department of Computational Intelligence and Systems Science, Tokyo Institute of Tech- Nology, Japan 2 Fei Yan Et Al](https://docslib.b-cdn.net/cover/2841/arxiv-2006-08747v1-quant-ph-15-jun-2020-department-of-computational-intelligence-and-systems-science-tokyo-institute-of-tech-nology-japan-2-fei-yan-et-al-1082841.webp)
Arxiv:2006.08747V1 [Quant-Ph] 15 Jun 2020 Department of Computational Intelligence and Systems Science, Tokyo Institute of Tech- Nology, Japan 2 Fei Yan Et Al
Noname manuscript No. (will be inserted by the editor) A Critical and Moving-Forward View on Quantum Image Processing Fei Yan · Salvador E. Venegas-Andraca · Kaoru Hirota Received: date / Accepted: date Physics and computer science have a long tradition of cross-fertilization. One of the latest outcomes of this mutually beneficial relationship is quan- tum information science, which comprises the study of information processing tasks that can be accomplished using quantum mechanical systems [1]. Quan- tum Image Processing (QIMP) is an emergent field of quantum information science whose main goal is to strengthen our capacity for storing, processing, and retrieving visual information from images and video either by transition- ing from digital to quantum paradigms or by complementing digital imaging with quantum techniques. The expectation is that harnessing the properties of quantum mechanical systems in QIMP will result in the realization of ad- vanced technologies that will outperform, enhance or complement existing and upcoming digital technologies for image and video processing tasks. QIMP has become a popular area of quantum research due to the ubiquity and primacy of digital image and video processing in modern life [2]. Digital image processing is a key component of several branches of applied computer science and engineering like computer vision and pattern recognition, disci- plines that have had a tremendous scientific, technological and commercial success due to their widespread applications in many fields like medicine [3,4], military technology [5,6] and the entertaining industry [7,8]. The technologi- cal and commercial success of digital image processing in contemporary (both civil and military) life is a most powerful incentive for working on QIMP. -

Adobe Acrobat PDF Document
BIOGRAPHICAL SKETCH of HUGH EVERETT, III. Eugene Shikhovtsev ul. Dzerjinskogo 11-16, Kostroma, 156005, Russia [email protected] ©2003 Eugene B. Shikhovtsev and Kenneth W. Ford. All rights reserved. Sources used for this biographical sketch include papers of Hugh Everett, III stored in the Niels Bohr Library of the American Institute of Physics; Graduate Alumni Files in Seeley G. Mudd Manuscript Library, Princeton University; personal correspondence of the author; and information found on the Internet. The author is deeply indebted to Kenneth Ford for great assistance in polishing (often rewriting!) the English and for valuable editorial remarks and additions. If you want to get an interesting perspective do not think of Hugh as a traditional 20th century physicist but more of a Renaissance man with interests and skills in many different areas. He was smart and lots of things interested him and he brought the same general conceptual methodology to solve them. The subject matter was not so important as the solution ideas. Donald Reisler [1] Someone once noted that Hugh Everett should have been declared a “national resource,” and given all the time and resources he needed to develop new theories. Joseph George Caldwell [1a] This material may be freely used for personal or educational purposes provided acknowledgement is given to Eugene B. Shikhovtsev, author ([email protected]), and Kenneth W. Ford, editor ([email protected]). To request permission for other uses, contact the author or editor. CONTENTS 1 Family and Childhood Einstein letter (1943) Catholic University of America in Washington (1950-1953). Chemical engineering. Princeton University (1953-1956). -

Quantum Information Science
Quantum Information Science Seth Lloyd Professor of Quantum-Mechanical Engineering Director, WM Keck Center for Extreme Quantum Information Theory (xQIT) Massachusetts Institute of Technology Article Outline: Glossary I. Definition of the Subject and Its Importance II. Introduction III. Quantum Mechanics IV. Quantum Computation V. Noise and Errors VI. Quantum Communication VII. Implications and Conclusions 1 Glossary Algorithm: A systematic procedure for solving a problem, frequently implemented as a computer program. Bit: The fundamental unit of information, representing the distinction between two possi- ble states, conventionally called 0 and 1. The word ‘bit’ is also used to refer to a physical system that registers a bit of information. Boolean Algebra: The mathematics of manipulating bits using simple operations such as AND, OR, NOT, and COPY. Communication Channel: A physical system that allows information to be transmitted from one place to another. Computer: A device for processing information. A digital computer uses Boolean algebra (q.v.) to processes information in the form of bits. Cryptography: The science and technique of encoding information in a secret form. The process of encoding is called encryption, and a system for encoding and decoding is called a cipher. A key is a piece of information used for encoding or decoding. Public-key cryptography operates using a public key by which information is encrypted, and a separate private key by which the encrypted message is decoded. Decoherence: A peculiarly quantum form of noise that has no classical analog. Decoherence destroys quantum superpositions and is the most important and ubiquitous form of noise in quantum computers and quantum communication channels. -

Spin-Photon Entanglement Realised by Quantum Dots Embedded in Waveguides
Master Thesis Spin-photon Entanglement Realised by Quantum Dots Embedded in Waveguides Mikkel Bloch Lauritzen Spin-photon Entanglement Realised by Quantum Dots Embedded in Waveguides Author Mikkel Bloch Lauritzen Advisor Anders S. Sørensen1 Advisor Peter Lodahl1 1Hy-Q, The Niels Bohr Institute Hy-Q The Niels Bohr Institute Submitted to the University of Copenhagen March 4, 2019 3 Abstract Spin-photon Entanglement Realised by Quantum Dots Embedded in Waveguides by Mikkel Bloch Lauritzen Quantum information theory is a relatively new and rapidly growing field of physics which in the last decades has made predictions of exciting features with no classical counterpart. The fact that the properties of quantum systems differ significantly from classical systems create opportunities for new communication protocols and sharing of information. Within all these applications, entanglement is an essential quantum feature. Having reliable sources of highly entangled qubits is paramount when apply- ing quantum information theory. The performance of these sources is limited both by unwanted interaction with the environment and by the performance of experimental equipment. In this thesis, two protocols which creates highly entangled spin-photon quantum states are presented and imperfections in the protocols are studied. The two spin-photon entanglement protocols are both realised by quantum dots embedded in waveguides. The studied imperfections relate to both the visibility of the system, the ability to separate the ground states, and the branching ratio of spontaneous decay, photon loss and phonon induced pure dephasing. In the study, realistic parameter values are applied which are based on experimental results. It is found, that the two studied protocols are promising and likely to perform well if applied in the laboratory to create highly entangled states. -
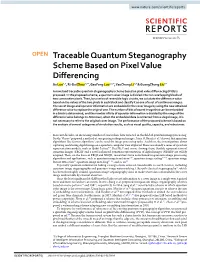
Traceable Quantum Steganography Scheme Based on Pixel Value Diferencing Jia Luo1,2, Ri-Gui Zhou1,2*, Gaofeng Luo1,2,3, Yaochong Li1,2 & Guangzhong Liu1*
www.nature.com/scientificreports OPEN Traceable Quantum Steganography Scheme Based on Pixel Value Diferencing Jia Luo1,2, Ri-Gui Zhou1,2*, GaoFeng Luo1,2,3, YaoChong Li1,2 & GuangZhong Liu1* A novel and traceable quantum steganography scheme based on pixel value diferencing (PVD) is proposed. In the proposed scheme, a quantum cover image is divided into non-overlapping blocks of two consecutive pixels. Then, by a series of reversible logic circuits, we calculate the diference value based on the values of the two pixels in each block and classify it as one of a set of continuous ranges. The secret image and operator information are embedded in the cover image by using the new obtained diference value to replace the original one. The number of bits of secret image that can be embedded in a block is determined, and the number of bits of operator information is decided by the range of the diference value belongs to. Moreover, when the embedded data is extracted from a stego image, it is not necessary to refer to the original cover image. The performance of the proposed scheme is based on the analysis of several categories of simulation results, such as visual quality, capacity, and robustness. In recent decades, an increasing number of researchers have invested in the feld of quantum image processing. Firstly, Vlasov1 proposed a method of recognizing orthogonal images. Later, G. Beach et al.2 showed that quantum algorithms like Grover algorithm3 can be used for image processing tasks. And then, the investigations about capturing and storing digital image on a quantum computer were explored. -
General Overview of the Field
Introduction to quantum computing and simulability General overview of the field Daniel J. Brod Leandro Aolita Ernesto Galvão Outline: General overview of the field • What is quantum computing? • A bit of history; • The rules: the postulates of quantum mechanics; • Information-theoretic-flavoured consequences; • Entanglement; • No-cloning; • Teleportation; • Superdense coding; What is quantum computing? • Computing paradigm where information is processed with the rules of quantum mechanics. • Extremely interdisciplinary research area! • Physics, Computer science, Mathematics; • Engineering (the thing looks nice on paper, but building it is hard!); • Chemistry, biology and others (applications); • Promised speedup on certain computational problems; • New insights into foundations of quantum mechanics and computer science. Let’s begin with some history! Timeline of (classical) computing Charles Babbage Ada Lovelace (1791-1871) (1815-1852) Analytical Engine (1837) First computer program (1843) First proposed general purpose Written by Ada Lovelace for the mechanical computer. Not Analytical engine. Computes completed by lack of money ☹️ Bernoulli numbers. Timeline of (classical) computing Alonzo Church Alan Turing (1903-1995) (1912-1954) 1 0 1 0 0 1 1 0 1 Turing Machine (1936) World War II Abstract model for a universal Colossus, Bombe, Z3/Z4 and others; computing device. - Decryption of secret messages; - Ballistics; Timeline of (classical) computing Intel® 4004 (1971) 2.300 transistors. Intel® Core™ (2010) 560.000.000 transistors. Transistor -

Towards a Coherent Theory of Physics and Mathematics
Towards a Coherent Theory of Physics and Mathematics Paul Benioff∗ As an approach to a Theory of Everything a framework for developing a coherent theory of mathematics and physics together is described. The main characteristic of such a theory is discussed: the theory must be valid and and sufficiently strong, and it must maximally describe its own validity and sufficient strength. The math- ematical logical definition of validity is used, and sufficient strength is seen to be a necessary and useful concept. The requirement of maximal description of its own validity and sufficient strength may be useful to reject candidate coherent theories for which the description is less than maximal. Other aspects of a coherent theory discussed include universal applicability, the relation to the anthropic principle, and possible uniqueness. It is suggested that the basic properties of the physical and mathematical universes are entwined with and emerge with a coherent theory. Support for this includes the indirect reality status of properties of very small or very large far away systems compared to moderate sized nearby systems. Dis- cussion of the necessary physical nature of language includes physical models of language and a proof that the meaning content of expressions of any axiomatizable theory seems to be independent of the algorithmic complexity of the theory. G¨odel maps seem to be less useful for a coherent theory than for purely mathematical theories because all symbols and words of any language must have representations as states of physical systems already in the domain of a coherent theory. arXiv:quant-ph/0201093v2 2 May 2002 1 Introduction The goal of a final theory or a Theory of Everything (TOE) is a much sought after dream that has occupied the attention of many physicists and philosophers. -

Quantum Image Processing: the Truth, the Whole Truth, and Nothing but the Truth About Its Problems on Internal Image- Representation and Outcomes Recovering
Quantum Image Processing: the truth, the whole truth, and nothing but the truth about its problems on internal image- representation and outcomes recovering Mario Mastriani ORCID Id: 0000-0002-5627-3935 Qubit Reset LLC, 2875 NE 191, suite 801, Aventura, FL 33180, USA [email protected] Abstract – In this paper, three tecniques of internal image-representation in a quantum computer are compared: Flexible Representation of Quantum Images (FRQI), Novel Enhanced Quantum Represen- tation of digital images (NEQR), and Quantum Boolean Image Processing (QBIP). All conspicuous technical items are considered in this comparison for a complete analysis: i) performance as Classical- to-Quantum (Cl2Qu) interface, ii) characteristics of the employed qubits, iii) sparsity of the used internal registers, iv) number and size of the required registers, v) quality in the outcomes recovering, vi) number of required gates and its consequent accumulated noise, vi) decoherence, and vii) fidelity. These analyses and demonstrations are automatically extended to all variants of FRQI and NEQR. This study demonstrated the practical infeasibility in the implementation of FRQI and NEQR on a physical quantum computer (QPU), while QBIP has proven to be extremely successful on: a) the four main quantum simulators on the cloud, b) two QPUs, and c) optical circuits from three labs. Moreover, QBIP also demonstrated its economy regarding the required resources needed for its proper function and its great robustness (immunity to noise), among other advantages, in fact, without any exceptions. Keywords: Classical-to-Quantum Interface; Flexible Representation of Quantum Images; Novel Enhanced Quantum Representation of digital images; Physical quantum computer; Quantum Boolean Image Processing; Quantum Image Processing. -

Optimal Estimation of States in Quantum Image Processing
Quantum image processing? Mario Mastriani DLQS LLC, 4431 NW 63RD Drive, Coconut Creek, FL 33073, USA [email protected] Abstract—This paper presents a number of problems concerning the practical (real) implementation of the techniques known as Quantum Image Processing. The most serious problem is the recovery of the outcomes after the quantum measurement, which will be demonstrated in this work that is equivalent to a noise measurement, and it is not considered in the literature on the subject. It is noteworthy that this is due to several factors: 1) a classical algorithm that uses Dirac’s notation and then it is coded in MATLAB does not constitute a quantum algorithm, 2) the literature emphasizes the internal representation of the image but says nothing about the classical-to-quantum and quantum-to-classical interfaces and how these are affected by decoherence, 3) the literature does not mention how to implement in a practical way (at the laboratory) these proposals internal representations, 4) given that Quantum Image Processing works with generic qubits this requires measurements in all axes of the Bloch sphere, logically, and 5) among others. In return, the technique known as Quantum Boolean Image Processing is mentioned, which works with computational basis states (CBS), exclusively. This methodology allows us to avoid the problem of quantum measurement, which alters the results of the measured except in the case of CBS. Said so far is extended to quantum algorithms outside image processing too. Keywords—Quantum algorithms – Quantum Boolean Image Processing - Quantum/Classical Interfaces – Quantum image processing - Quantum measurement - Quantum signal processing. -

Neuroscience, Quantum Space-Time Geometry and Orch OR Theory
Journal of Cosmology, 2011, Vol. 14. JournalofCosmology.com, 2011 Consciousness in the Universe: Neuroscience, Quantum Space-Time Geometry and Orch OR Theory Roger Penrose, PhD, OM, FRS1, and Stuart Hameroff, MD2 1Emeritus Rouse Ball Professor, Mathematical Institute, Emeritus Fellow, Wadham College, University of Oxford, Oxford, UK 2Professor, Anesthesiology and Psychology, Director, Center for Consciousness Studies, The University of Arizona, Tucson, Arizona, USA Abstract The nature of consciousness, its occurrence in the brain, and its ultimate place in the universe are unknown. We proposed in the mid 1990's that consciousness depends on biologically 'orchestrated' quantum computations in collections of microtubules within brain neurons, that these quantum computations correlate with and regulate neuronal activity, and that the continuous Schrödinger evolution of each quantum computation terminates in accordance with the specific Diósi–Penrose (DP) scheme of 'objective reduction' of the quantum state (OR). This orchestrated OR activity (Orch OR) is taken to result in a moment of conscious awareness and/or choice. This particular (DP) form of OR is taken to be a quantum-gravity process related to the fundamentals of spacetime geometry, so Orch OR suggests a connection between brain biomolecular processes and fine-scale structure of the universe. Here we review and update Orch OR in light of criticisms and developments in quantum biology, neuroscience, physics and cosmology. We conclude that consciousness plays an intrinsic role in the universe. KEY WORDS: Consciousness, microtubules, OR, Orch OR, quantum computation, quantum gravity 1. Introduction: Consciousness, Brain and Evolution Consciousness implies awareness: subjective experience of internal and external phenomenal worlds. Consciousness is central also to understanding, meaning and volitional choice with the experience of free will.