States of a Rotor Machine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

IMPLEMENTASI ALGORITMA CAESAR, CIPHER DISK, DAN SCYTALE PADA APLIKASI ENKRIPSI DAN DEKRIPSI PESAN SINGKAT, Lumasms
Prosiding Seminar Ilmiah Nasional Komputer dan Sistem Intelijen (KOMMIT 2014) Vol. 8 Oktober 2014 Universitas Gunadarma – Depok – 14 – 15 Oktober 2014 ISSN : 2302-3740 IMPLEMENTASI ALGORITMA CAESAR, CIPHER DISK, DAN SCYTALE PADA APLIKASI ENKRIPSI DAN DEKRIPSI PESAN SINGKAT, LumaSMS Yusuf Triyuswoyo ST. 1 Ferina Ferdianti ST. 2 Donny Ajie Baskoro ST. 3 Lia Ambarwati ST. 4 Septiawan ST. 5 1,2,3,4,5Jurusan Manajemen Sistem Informasi, Universitas Gunadarma [email protected] Abstrak Short Message Service (SMS) merupakan salah satu cara berkomunikasi yang banyak digunakan oleh pengguna telepon seluler. Namun banyaknya pengguna telepon seluler yang menggunakan layanan SMS, tidak diimbangi dengan faktor keamanan yang ada pada layanan tersebut. Banyak pengguna telepon seluler yang belum menyadari bahwa SMS tidak menjamin integritas dan keamanan pesan yang disampaikan. Ada beberapa risiko yang dapat mengancam keamanan pesan pada layanan SMS, diantaranya: SMS spoofing, SMS snooping, dan SMS interception. Untuk mengurangi risiko tersebut, maka dibutuhkan sebuah sistem keamanan pada layanan SMS yang mampu menjaga integritas dan keamanan isi pesan. Dimana tujuannya ialah untuk menutupi celah pada tingkat keamanan SMS. Salah satu penanggulangannya ialah dengan menerapkan algoritma kriptografi, yaitu kombinasi atas algoritma Cipher Disk, Caesar, dan Scytale pada pesan yang akan dikirim. Tujuan dari penulisan ini adalah membangun aplikasi LumaSMS, dengan menggunakan kombinasi ketiga algoritma kriptografi tersebut. Dengan adanya aplikasi ini diharapkan mampu mengurangi masalah keamanan dan integritas SMS. Kata Kunci: caesar, cipher disk, kriptografi, scytale, SMS. PENDAHULUAN dibutuhkan dikarenakan SMS mudah digunakan dan biaya yang dikeluarkan Telepon seluler merupakan salah untuk mengirim SMS relatif murah. satu hasil dari perkembangan teknologi Namun banyaknya pengguna komunikasi. -
The Mathemathics of Secrets.Pdf
THE MATHEMATICS OF SECRETS THE MATHEMATICS OF SECRETS CRYPTOGRAPHY FROM CAESAR CIPHERS TO DIGITAL ENCRYPTION JOSHUA HOLDEN PRINCETON UNIVERSITY PRESS PRINCETON AND OXFORD Copyright c 2017 by Princeton University Press Published by Princeton University Press, 41 William Street, Princeton, New Jersey 08540 In the United Kingdom: Princeton University Press, 6 Oxford Street, Woodstock, Oxfordshire OX20 1TR press.princeton.edu Jacket image courtesy of Shutterstock; design by Lorraine Betz Doneker All Rights Reserved Library of Congress Cataloging-in-Publication Data Names: Holden, Joshua, 1970– author. Title: The mathematics of secrets : cryptography from Caesar ciphers to digital encryption / Joshua Holden. Description: Princeton : Princeton University Press, [2017] | Includes bibliographical references and index. Identifiers: LCCN 2016014840 | ISBN 9780691141756 (hardcover : alk. paper) Subjects: LCSH: Cryptography—Mathematics. | Ciphers. | Computer security. Classification: LCC Z103 .H664 2017 | DDC 005.8/2—dc23 LC record available at https://lccn.loc.gov/2016014840 British Library Cataloging-in-Publication Data is available This book has been composed in Linux Libertine Printed on acid-free paper. ∞ Printed in the United States of America 13579108642 To Lana and Richard for their love and support CONTENTS Preface xi Acknowledgments xiii Introduction to Ciphers and Substitution 1 1.1 Alice and Bob and Carl and Julius: Terminology and Caesar Cipher 1 1.2 The Key to the Matter: Generalizing the Caesar Cipher 4 1.3 Multiplicative Ciphers 6 -

Polish Mathematicians Finding Patterns in Enigma Messages
Fall 2006 Chris Christensen MAT/CSC 483 Machine Ciphers Polyalphabetic ciphers are good ways to destroy the usefulness of frequency analysis. Implementation can be a problem, however. The key to a polyalphabetic cipher specifies the order of the ciphers that will be used during encryption. Ideally there would be as many ciphers as there are letters in the plaintext message and the ordering of the ciphers would be random – an one-time pad. More commonly, some rotation among a small number of ciphers is prescribed. But, rotating among a small number of ciphers leads to a period, which a cryptanalyst can exploit. Rotating among a “large” number of ciphers might work, but that is hard to do by hand – there is a high probability of encryption errors. Maybe, a machine. During World War II, all the Allied and Axis countries used machine ciphers. The United States had SIGABA, Britain had TypeX, Japan had “Purple,” and Germany (and Italy) had Enigma. SIGABA http://en.wikipedia.org/wiki/SIGABA 1 A TypeX machine at Bletchley Park. 2 From the 1920s until the 1970s, cryptology was dominated by machine ciphers. What the machine ciphers typically did was provide a mechanical way to rotate among a large number of ciphers. The rotation was not random, but the large number of ciphers that were available could prevent depth from occurring within messages and (if the machines were used properly) among messages. We will examine Enigma, which was broken by Polish mathematicians in the 1930s and by the British during World War II. The Japanese Purple machine, which was used to transmit diplomatic messages, was broken by William Friedman’s cryptanalysts. -

The the Enigma Enigma Machinemachine
TheThe EnigmaEnigma MachineMachine History of Computing December 6, 2006 Mike Koss Invention of Enigma ! Invented by Arthur Scherbius, 1918 ! Adopted by German Navy, 1926 ! Modified military version, 1930 ! Two Additional rotors added, 1938 How Enigma Works Scrambling Letters ! Each letter on the keyboard is connected to a lamp letter that depends on the wiring and position of the rotors in the machine. ! Right rotor turns before each letter. How to Use an Enigma ! Daily Setup – Secret settings distributed in code books. ! Encoding/Decoding a Message Setup: Select (3) Rotors ! We’ll use I-II-III Setup: Rotor Ring Settings ! We’ll use A-A-A (or 1-1-1). Rotor Construction Setup: Plugboard Settings ! We won’t use any for our example (6 to 10 plugs were typical). Setup: Initial Rotor Position ! We’ll use “M-I-T” (or 13-9-20). Encoding: Pick a “Message Key” ! Select a 3-letter key (or indicator) “at random” (left to the operator) for this message only. ! Say, I choose “M-C-K” (or 13-3-11 if wheels are printed with numbers rather than letters). Encoding: Transmit the Indicator ! Germans would transmit the indicator by encoding it using the initial (daily) rotor position…and they sent it TWICE to make sure it was received properly. ! E.g., I would begin my message with “MCK MCK”. ! Encoded with the daily setting, this becomes: “NWD SHE”. Encoding: Reset Rotors ! Now set our rotors do our chosen message key “M-C-K” (13-3-11). ! Type body of message: “ENIGMA REVEALED” encodes to “QMJIDO MZWZJFJR”. -
Cipher Disk A
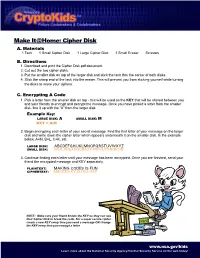
Make It@Home: Cipher Disk A. Materials 1 Tack 1 Small Cipher Disk 1 Large Cipher Disk 1 Small Eraser Scissors B. Directions 1. Download and print the Cipher Disk.pdf document. 2. Cut out the two cipher disks. 3. Put the smaller disk on top of the larger disk and stick the tack thru the center of both disks. 4. Stick the sharp end of the tack into the eraser. This will prevent you from sticking yourself while turning the disks to make your ciphers. C. Encrypting A Code 1. Pick a letter from the smaller disk on top - this will be used as the KEY that will be shared between you and your friends to encrypt and decrypt the message. Once you have picked a letter from the smaller disk, line it up with the “A” from the larger disk. Example Key: LARGE DISK: A SMALL DISK: M KEY = A:M 2. Begin encrypting each letter of your secret message. Find the first letter of your message on the larger disk and write down the cipher letter which appears underneath it on the smaller disk. In the example below, A=M, B=L, C=K, etc. LARGE DISK: ABCDEFGHIJKLMNOPQRSTUVWXYZ SMALL DISK: MLKJIHGFEDCBAZYXWVUTSRQPON 3. Continue finding each letter until your message has been encrypted. Once you are finished, send your friend the encrypted message and KEY seperately. PLAINTEXT: MAKING CODES IS FUN CIPHERTEXT: AMCEZG KYJIU EU HSZ NOTE: Make sure your friend knows the KEY so they can use their Cipher Disk to break the code. For a super secure cipher, create a new KEY every time you send a message OR change the KEY every time you encrypt a letter. -
Practical Aspects of Modern Cryptography
University of Washington CSEP 590TU – Practical Aspects of Modern Cryptography Instructors: Josh Benaloh, Brian LaMacchia, John Manferdelli Tuesdays: 6:30-9:30, Allen Center 305 Webpage: http://www.cs.washington.edu/education/courses/csep590/06wi/ Recommended texts: Stinson, Cryptography, Theory and Practice. 2nd Edition, CRC Press, 2002. Menezes, vanOrtshot, Vanstone. Handbook of Applied Cryptography. Ferguson and Schneier, Practical Cryptography. JLM 20060107 22:16 1 New Lecture Schedule Date Topic Lecturer 1 1/3 Practical Aspects of Cryptography Josh 2 1/10 Symmetric Key Ciphers and Hashes John 3 1/17 Public Key Ciphers Josh 4 1/24 Cryptographic Protocols I Brian 5 1/31 Cryptographic Protocols II Brian 6 2/7 Security of Block Ciphers John 7 2/14 AES and Cryptographic Hashes John 8 2/21 Trust, PKI, Key Management [Last HW Brian Assignment) 9 3/1 Random Numbers/Elliptic Curve Crypto Josh 10 3/8 Three topics: Elections, ITAR/Politics, Side All Channels/Timing Attacks, DRM, BigNum Implementation JLM 20060107 22:16 2 Symmetric Key Cryptography and Cryptographic Hashes - I John Manferdelli [email protected] [email protected] Portions © 2004-2005, John Manferdelli. This material is provided without warranty of any kind including, without limitation, warranty of non-infringement or suitability for any purpose. This material is not guaranteed to be error free and is intended for instructional use only. JLM 20060107 22:16 3 Communications Engineers Coat of Arms The Source Sender: Alice Noisy insecure channel Plaintext Compress Encrypt Encode (P) (to save space) (for confidentiality) (to correct errors) The Sink Receiver:Bob Noisy insecure channel Decode Decrypt Decompress Plaintext (for confidentiality) (to correct errors) (to save space) (P) JLM 20060107 22:16 4 Symmetric Encryption Plaintext (P) Encrypt Ciphertext (C) E (P) Key (k) k Ciphertext (C) Decrypt Plaintext (P) D (P) Key (k) k • Symmetric Key cryptographic algorithms use a secret known to the authorized parties called a “key”. -

ISA 562 Information Security Theory & Practice
ISA 562 Information Security Theory & Practice Introduction to Cryptography Agenda • Basics & Definitions • Classical Cryptography • Symmetric (Secret Key) Cryptography • DES (Data Encryption Standard) • Multiple Encryptions • Modes of Block Cipher Operations • Math Essential • Asymmetric (Public Key) Cryptography 2 1 Basics & Definitions Security Concepts (I) • Confidentiality – Prevent information from being exposed to unintended party – Ex: An employee should not come to know the salary of his manager • Integrity – Assure that the information has not been tempered – Ex: An employee should not be able to modify the employee's own salary • Identity – Assure that the party of concern is authentic - it is what it claims to be – Ex: An employee should be able to uniquely identify and authenticate himself/herself 4 2 Security Concepts (II) • Availability – Assure that unused service or resource is available to legitimate users – Ex: Paychecks should be printed on time as stipulated by law • Anonymity – Assure that the identity of some party is remain anonymous – Ex: The manager should not know who had a critical review of him • Non-Repudiation – Assure that authenticated party has indeed done something that cannot be denied – Ex: Once the employee has cashed his paycheck, he can’t deny it. 5 Cryptography • Crypt = secret • Graph = writing • Cryptography is the science / art of transforming meaningful information into unintelligible text Becoming a science that relies on mathematics (number theory, algebra) • Cryptanalysis is the science / art of breaking cryptographic codes • Cryptology is the science / art / study of both cryptography and cryptanalysis 6 3 Applications of Cryptography • Assuring document integrity • Assuring document confidentiality • Authenticating parties • Document signature • Non-repudiation • Secure transactions • Exchanging keys • Sharing Secrets • Digital cash • Preserving anonymity • Copyright protection • More . -
Work Load of the Maintenance Branch
HEADQUARTERS ARMY SECURITY AGENCY WASHINGTON 25, D. C. WDGSS-85 15 May 1946 SUBJECT: Work Load of the Maintenance Branch TO: Chief, Security Division 1. The Repair Section of Maintenance Branch is .faced with an ex tremely heavy backlog of' work due to the large amounts of' cryptographic equipment returned from overseas for rehabilitation. Awaiting rehabili tation by the Repair Section is the followi~g list of equipment and the man hours estimated to complete the work required.: EQUIPMENT MAN HOURS REQUIRED TOTAL 1808 SIGABA 36 65,088 1182 SIGCUM 12 14,184 300 SIGNIN 4 1,200 2297 SIGIVI 4 9,188 533 SIGAMUG 4, 2,132 Total man hours 91,792 These figures represent the number of equipments on hand as of 1 May 1946 and will be continually increased by the arrival of additional equipment . from overseas. 2. It is considered probable that the SIGABA will be modified along the lines proposed by the Navy. It is proposed that all SIGABA 1s be modi fied at this Headquarters before shipment is made to the field, thus in creasing the work load as follows: EQUIPMENT MAN HOURS REQUIRED 3241 SIGABA 12 The above figure of' twelve hours per machine is an estimate based on preliminary studies of' the proposed change. It may be possible to greatly reduce this total af'ter the changes have been f inaJ.ly agreed on by the .Army and the Navy, and time studies can be made under actual conditions. ,3. In order to properly preserve these equipments while in extended storage, it is recommended that the proposals set .forth in a memorandum to the Chief, Security Division, 4 December 1945, subject "Preparation of Declassified and approved for release by NSA on 01-16-2014 pursuantto E .0. -
Cryptology: an Historical Introduction DRAFT
Cryptology: An Historical Introduction DRAFT Jim Sauerberg February 5, 2013 2 Copyright 2013 All rights reserved Jim Sauerberg Saint Mary's College Contents List of Figures 8 1 Caesar Ciphers 9 1.1 Saint Cyr Slide . 12 1.2 Running Down the Alphabet . 14 1.3 Frequency Analysis . 15 1.4 Linquist's Method . 20 1.5 Summary . 22 1.6 Topics and Techniques . 22 1.7 Exercises . 23 2 Cryptologic Terms 29 3 The Introduction of Numbers 31 3.1 The Remainder Operator . 33 3.2 Modular Arithmetic . 38 3.3 Decimation Ciphers . 40 3.4 Deciphering Decimation Ciphers . 42 3.5 Multiplication vs. Addition . 44 3.6 Koblitz's Kid-RSA and Public Key Codes . 44 3.7 Summary . 48 3.8 Topics and Techniques . 48 3.9 Exercises . 49 4 The Euclidean Algorithm 55 4.1 Linear Ciphers . 55 4.2 GCD's and the Euclidean Algorithm . 56 4.3 Multiplicative Inverses . 59 4.4 Deciphering Decimation and Linear Ciphers . 63 4.5 Breaking Decimation and Linear Ciphers . 65 4.6 Summary . 67 4.7 Topics and Techniques . 67 4.8 Exercises . 68 3 4 CONTENTS 5 Monoalphabetic Ciphers 71 5.1 Keyword Ciphers . 72 5.2 Keyword Mixed Ciphers . 73 5.3 Keyword Transposed Ciphers . 74 5.4 Interrupted Keyword Ciphers . 75 5.5 Frequency Counts and Exhaustion . 76 5.6 Basic Letter Characteristics . 77 5.7 Aristocrats . 78 5.8 Summary . 80 5.9 Topics and Techniques . 81 5.10 Exercises . 81 6 Decrypting Monoalphabetic Ciphers 89 6.1 Letter Interactions . 90 6.2 Decrypting Monoalphabetic Ciphers . -

Communication Intelligence and Security, William F Friedman
UNCLASSIFIED DATE: 26 April 1960 NAME: Friedman, William F. PLACE: Breckinridge Hall, Marine Corp School TITLE: Communications Intelligence and Security Presentation Given to Staff and Students; Introduction by probably General MILLER (NFI) Miller: ((TR NOTE: Introductory remarks are probably made by General Miller (NFI).)) Gentleman, I…as we’ve grown up, there have been many times, I suppose, when we’ve been inquisitive about means of communication, means of finding out what’s going on. Some of us who grew up out in the country used to tap in on a country telephone line and we could find out what was going on that way—at least in the neighborhood. And then, of course, there were always a few that you’d read about in the newspaper who would carry this a little bit further and read some of your neighbor’s mail by getting at it at the right time, and reading it and putting it back. Of course, a good many of those people ended up at a place called Fort Leavenworth. This problem of security of information is with us in the military on a [sic] hour-to-hour basis because it’s our bread and butter. It’s what we focus on in the development of our combat plans in an attempt to project these plans onto an enemy and defeat him. And so, we use a good many devices. We spend a tremendous amount of effort and money in attempting to keep our secrets in fact secret—at least at the echelon where we feel this is necessary. -

SIS and Cipher Machines: 1930 – 1940
SIS and Cipher Machines: 1930 – 1940 John F Dooley Knox College Presented at the 14th Biennial NSA CCH History Symposium, October 2013 This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 United States License. 1 Thursday, November 7, 2013 1 The Results of Friedman’s Training • The initial training regimen as it related to cipher machines was cryptanalytic • But this detailed analysis of the different machine types informed the team’s cryptographic imaginations when it came to creating their own machines 2 Thursday, November 7, 2013 2 The Machines • Wheatstone/Plett Machine • M-94 • AT&T machine • M-138 and M-138-A • Hebern cipher machine • M-209 • Kryha • Red • IT&T (Parker Hitt) • Purple • Engima • SIGABA (M-134 and M-134-C) • B-211(and B-21) 3 Thursday, November 7, 2013 3 The Wheatstone/Plett Machine • polyalphabetic cipher disk with gearing mechanism rotates the inner alphabet. • Plett’s improvement is to add a second key and mixed alphabet to the inner ring. • Friedman broke this in 1918 Principles: (a) The inner workings of a mechanical cryptographic device can be worked out using a paper and pencil analog of the device. (b) if there is a cycle in the mechanical device (say for particular cipher alphabets), then that cycle can be discovered by analysis of the paper and pencil analog. 4 Thursday, November 7, 2013 4 The Army M-94 • Traces its roots back to Jefferson and Bazieres • Used by US Army from 1922 to circa 1942 • 25 mixed alphabets. Disk order is the key. -
Cryptography and Data Security
Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications 1982-05 Cryptography and Data Security Denning, Dorothy E. þÿDenning, D. E., Cryptography and Data Security, Addison Wesley, May 1982. http://hdl.handle.net/10945/37163 Cryptography and 13ata Security Dorothy Elizabeth Rob,ling Denning PURDUE UNIVERSITY A VV ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts [] Menlo Park, California London II Amsterdam • Don Mills, Ontario I Sydney Library of Congress Cataloging in Publication Data Denning, Dorothy E., (Dorothy Elizabeth), 1945- Cryptography and data security. Includes bibliographical references and index. 1. Computers--Access control. 2. Cryptography. 3. Data protection. 1. Title. QA76.9.A25D46 1982 001.64'028'9 81-15012 ISBN 0-201-10150-5 AACR2 Copyright © 1982 by Addison-Wesley Publishing Company, Inc. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or other- wise, without the prior written permission of the publisher. Printed in the United States of America. Published simultaneously in Canada. ISBN 0-201-10150-5 A BCDE FG H I J-M A-898765432 In memory of my Father, Cornelius Lowell Robling 1910-1965 Preface Electronic computers have evolved from exiguous experimental enterprises in the 1940s to prolific practical data processing systems in the 1980s. As we have come to rely on these systems to process and store data, we have also come to wonder about their ability to protect valuable data. Data security is the science and study of methods of protecting data in computer and communication systems from unauthorized disclosure and modifica- tion.