Improving Voice Over Gnunet
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Impact of Exception Handling Compatibility on Binary Instrumentation†
On the Impact of Exception Handling Compatibility on Binary Instrumentation† Soumyakant Priyadarshan Huan Nguyen R. Sekar Stony Brook University Stony Brook University Stony Brook University Stony Brook, NY, USA Stony Brook, NY, USA Stony Brook, NY, USA [email protected] [email protected] [email protected] Abstract overheads, but has been held back by challenges in accurate dis- assembly and code pointer identification. With the emergence of To support C++ exception handling, compilers generate metadata position-independent (or relocatable) binaries as the dominant for- that is a rich source of information about the code layout. On mat in recent years, researchers have been able to address these Linux, this metadata is also used to support stack tracing, thread challenges, e.g., in Egalito [41], RetroWrite [11] and SBR[28, 29] cleanup and other functions. For this reason, Linux binaries contain systems. code-layout-revealing metadata for C-code as well. Even hand- written assembly in low-level system libraries is covered by such Despite recent advances, deployability of binary instrumentation metadata. We investigate the implications of this metadata in this continues to face significant challenges. One of the major concerns paper, and show that it can be used to (a) improve accuracy of is compatibility. In particular, existing static binary instrumentation disassembly, (b) achieve significantly better accuracy at function tools tend to break stack tracing (for C and C++) as well as C++ boundary identification as compared to previous research, and(c) exception handling. While compatibility with these features may as a rich source of information for defeating fine-grained code not be important for proof-of-concept instrumentations, it is hardly randomization. -
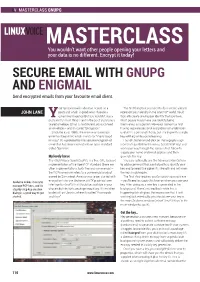
MASTERCLASS GNUPG MASTERCLASS You Wouldn’T Want Other People Opening Your Letters and BEN EVERARD Your Data Is No Different
MASTERCLASS GNUPG MASTERCLASS You wouldn’t want other people opening your letters and BEN EVERARD your data is no different. Encrypt it today! SECURE EMAIL WITH GNUPG AND ENIGMAIL Send encrypted emails from your favourite email client. our typical email is about as secure as a The first thing that you need to do is create a key to JOHN LANE postcard, which is good news if you’re a represent your identity in the OpenPGP world. You’d Ygovernment agency. But you wouldn’t use a typically create one key per identity that you have. postcard for most things sent in the post; you’d use a Most people would have one identity, being sealed envelope. Email is no different; you just need themselves as a person. However, some may find an envelope – and it’s called “Encryption”. having separate personal and professional identities Since the early 1990s, the main way to encrypt useful. It’s a personal choice, but starting with a single email has been PGP, which stands for “Pretty Good key will help while you’re learning. Privacy”. It’s a protocol for the secure encryption of Launch Seahorse and click on the large plus-sign email that has since evolved into an open standard icon that’s just below the menu. Select ‘PGP Key’ and called OpenPGP. work your way through the screens that follow to supply your name and email address and then My lovely horse generate the key. The GNU Privacy Guard (GnuPG), is a free, GPL-licensed You can, optionally, use the Advanced Key Options implementation of the OpenPGP standard (there are to add a comment that can help others identify your other implementations, both free and commercial – key and to select the cipher, its strength and set when the PGP name now refers to a commercial product the key should expire. -

IPFS and Friends: a Qualitative Comparison of Next Generation Peer-To-Peer Data Networks Erik Daniel and Florian Tschorsch
1 IPFS and Friends: A Qualitative Comparison of Next Generation Peer-to-Peer Data Networks Erik Daniel and Florian Tschorsch Abstract—Decentralized, distributed storage offers a way to types of files [1]. Napster and Gnutella marked the beginning reduce the impact of data silos as often fostered by centralized and were followed by many other P2P networks focusing on cloud storage. While the intentions of this trend are not new, the specialized application areas or novel network structures. For topic gained traction due to technological advancements, most notably blockchain networks. As a consequence, we observe that example, Freenet [2] realizes anonymous storage and retrieval. a new generation of peer-to-peer data networks emerges. In this Chord [3], CAN [4], and Pastry [5] provide protocols to survey paper, we therefore provide a technical overview of the maintain a structured overlay network topology. In particular, next generation data networks. We use select data networks to BitTorrent [6] received a lot of attention from both users and introduce general concepts and to emphasize new developments. the research community. BitTorrent introduced an incentive Specifically, we provide a deeper outline of the Interplanetary File System and a general overview of Swarm, the Hypercore Pro- mechanism to achieve Pareto efficiency, trying to improve tocol, SAFE, Storj, and Arweave. We identify common building network utilization achieving a higher level of robustness. We blocks and provide a qualitative comparison. From the overview, consider networks such as Napster, Gnutella, Freenet, BitTor- we derive future challenges and research goals concerning data rent, and many more as first generation P2P data networks, networks. -

CS 255: Intro to Cryptography 1 Introduction 2 End-To-End
Programming Assignment 2 Winter 2021 CS 255: Intro to Cryptography Prof. Dan Boneh Due Monday, March 1st, 11:59pm 1 Introduction In this assignment, you are tasked with implementing a secure and efficient end-to-end encrypted chat client using the Double Ratchet Algorithm, a popular session setup protocol that powers real- world chat systems such as Signal and WhatsApp. As an additional challenge, assume you live in a country with government surveillance. Thereby, all messages sent are required to include the session key encrypted with a fixed public key issued by the government. In your implementation, you will make use of various cryptographic primitives we have discussed in class—notably, key exchange, public key encryption, digital signatures, and authenticated encryption. Because it is ill-advised to implement your own primitives in cryptography, you should use an established library: in this case, the Stanford Javascript Crypto Library (SJCL). We will provide starter code that contains a basic template, which you will be able to fill in to satisfy the functionality and security properties described below. 2 End-to-end Encrypted Chat Client 2.1 Implementation Details Your chat client will use the Double Ratchet Algorithm to provide end-to-end encrypted commu- nications with other clients. To evaluate your messaging client, we will check that two or more instances of your implementation it can communicate with each other properly. We feel that it is best to understand the Double Ratchet Algorithm straight from the source, so we ask that you read Sections 1, 2, and 3 of Signal’s published specification here: https://signal. -

A Transport Layer Abstraction for Peer-To-Peer Networks Ronaldo A
A Transport Layer Abstraction for Peer-to-Peer Networks Ronaldo A. Ferreira, Christian Grothoff and Paul Ruth Department of Computer Sciences Purdue University g frf,grothoff,ruth @cs.purdue.edu http://www.gnu.org/software/GNUnet/ B Abstract— The initially unrestricted host-to-host communica- same peer-to-peer network. In fact, two peers A and may tion model provided by the Internet Protocol has deteriorated want to use differentmodes of communicationon the same link. due to political and technical changes caused by Internet growth. For example, suppose node B is behind a NAT box and cannot While this is not a problem for most client-server applications, peer-to-peer networks frequently struggle with peers that are be reached directly via UDP or TCP. In a system with multiple only partially reachable. We describe how a peer-to-peer frame- transport protocols, A could initiate a connection by sending an B A work can hide diversity and obstacles in the underlying Internet e-mail to B (SMTP) and then have contact via TCP, al- and provide peer-to-peer applications with abstractions that hide lowing A to continue further communication on a bidirectional transport specific details. We present the details of an implemen- TCP connection. tation of a transport service based on SMTP. Small-scale bench- marks are used to compare transport services over UDP, TCP, and We will use GNUnet as our reference peer-to-peer system, SMTP. but it should be clear that the idea of a transport abstraction can be applied to other systems. GNUnet is a peer-to-peer frame- work whose main focus is on security [1], [5]. -

Open Source Used in 250 350 550 Switches 2.5.7.X
Open Source Used In 250 350 550 switches 2.5.7.x Cisco Systems, Inc. www.cisco.com Cisco has more than 200 offices worldwide. Addresses, phone numbers, and fax numbers are listed on the Cisco website at www.cisco.com/go/offices. Text Part Number: 78EE117C99-1099179018 Open Source Used In 250 350 550 switches 2.5.7.x 1 This document contains licenses and notices for open source software used in this product. With respect to the free/open source software listed in this document, if you have any questions or wish to receive a copy of any source code to which you may be entitled under the applicable free/open source license(s) (such as the GNU Lesser/General Public License), please contact us at [email protected]. In your requests please include the following reference number 78EE117C99-1099179018 Contents 1.1 jq 1.6-1 1.1.1 Available under license 1.2 avahi 0.6.32-3 1.2.1 Available under license 1.3 dnsmasq 2.78-1 1.3.1 Available under license 1.4 ejdb 1.2.12 1.4.1 Available under license 1.5 procd 2015/10/29 1.5.1 Available under license 1.6 jsonfilter 2014/6/19 1.6.1 Available under license 1.7 libnetconf 0.10.0-2 1.7.1 Available under license 1.8 libcgroup 0.41 1.8.1 Available under license 1.9 d-bus 1.10.4 1.9.1 Available under license 1.10 net-snmp 5.9 1.10.1 Available under license 1.11 nmap 6.47-2 1.11.1 Available under license 1.12 u-boot 2013.01 1.12.1 Available under license 1.13 bzip2 1.0.6 1.13.1 Available under license Open Source Used In 250 350 550 switches 2.5.7.x 2 1.14 openssl 1.1.1c 1.14.1 Available -

T U M a Digital Wallet Implementation for Anonymous Cash
Technische Universität München Department of Informatics Bachelor’s Thesis in Information Systems A Digital Wallet Implementation for Anonymous Cash Oliver R. Broome Technische Universität München Department of Informatics Bachelor’s Thesis in Information Systems A Digital Wallet Implementation for Anonymous Cash Implementierung eines digitalen Wallets for anonyme Währungen Author Oliver R. Broome Supervisor Prof. Dr.-Ing. Georg Carle Advisor Sree Harsha Totakura, M. Sc. Date October 15, 2015 Informatik VIII Chair for Network Architectures and Services I conrm that this thesis is my own work and I have documented all sources and material used. Garching b. München, October 15, 2015 Signature Abstract GNU Taler is a novel approach to digital payments with which payments are performed with cryptographically generated representations of actual currencies. The main goal of GNU Taler is to allow taxable anonymous payments to non-anonymous merchants. This thesis documents the implementation of the Android version of the GNU Taler wallet, which allows users to create new Taler-based funds and perform payments with them. Zusammenfassung GNU Taler ist ein neuartiger Ansatz für digitales Bezahlen, bei dem Zahlungen mit kryptographischen Repräsentationen von echten Währungen getätigt werden. Das Hauptziel von GNU Taler ist es, versteuerbare, anonyme Zahlungen an nicht-anonyme Händler zu ermöglichen. Diese Arbeit dokumentiert die Implementation der Android-Version des Taler-Portemonnaies, der es Benutzern erlaubt, neues Taler-Guthaben zu erzeugen und mit ihnen Zahlungen zu tätigen. I Contents 1 Introduction 1 1.1 GNU Taler . .2 1.2 Goals of the thesis . .2 1.3 Outline . .3 2 Implementation prerequisites 5 2.1 Native libraries . .5 2.1.1 Libgcrypt . -

Demarinis Kent Williams-King Di Jin Rodrigo Fonseca Vasileios P
sysfilter: Automated System Call Filtering for Commodity Software Nicholas DeMarinis Kent Williams-King Di Jin Rodrigo Fonseca Vasileios P. Kemerlis Department of Computer Science Brown University Abstract This constant stream of additional functionality integrated Modern OSes provide a rich set of services to applications, into modern applications, i.e., feature creep, not only has primarily accessible via the system call API, to support the dire effects in terms of security and protection [1, 71], but ever growing functionality of contemporary software. How- also necessitates a rich set of OS services: applications need ever, despite the fact that applications require access to part of to interact with the OS kernel—and, primarily, they do so the system call API (to function properly), OS kernels allow via the system call (syscall) API [52]—in order to perform full and unrestricted use of the entire system call set. This not useful tasks, such as acquiring or releasing memory, spawning only violates the principle of least privilege, but also enables and terminating additional processes and execution threads, attackers to utilize extra OS services, after seizing control communicating with other programs on the same or remote of vulnerable applications, or escalate privileges further via hosts, interacting with the filesystem, and performing I/O and exploiting vulnerabilities in less-stressed kernel interfaces. process introspection. To tackle this problem, we present sysfilter: a binary Indicatively, at the time of writing, the Linux -

The Double Ratchet Algorithm
The Double Ratchet Algorithm Trevor Perrin (editor) Moxie Marlinspike Revision 1, 2016-11-20 Contents 1. Introduction 3 2. Overview 3 2.1. KDF chains . 3 2.2. Symmetric-key ratchet . 5 2.3. Diffie-Hellman ratchet . 6 2.4. Double Ratchet . 13 2.6. Out-of-order messages . 17 3. Double Ratchet 18 3.1. External functions . 18 3.2. State variables . 19 3.3. Initialization . 19 3.4. Encrypting messages . 20 3.5. Decrypting messages . 20 4. Double Ratchet with header encryption 22 4.1. Overview . 22 4.2. External functions . 26 4.3. State variables . 26 4.4. Initialization . 26 4.5. Encrypting messages . 27 4.6. Decrypting messages . 28 5. Implementation considerations 29 5.1. Integration with X3DH . 29 5.2. Recommended cryptographic algorithms . 30 6. Security considerations 31 6.1. Secure deletion . 31 6.2. Recovery from compromise . 31 6.3. Cryptanalysis and ratchet public keys . 31 1 6.4. Deletion of skipped message keys . 32 6.5. Deferring new ratchet key generation . 32 6.6. Truncating authentication tags . 32 6.7. Implementation fingerprinting . 32 7. IPR 33 8. Acknowledgements 33 9. References 33 2 1. Introduction The Double Ratchet algorithm is used by two parties to exchange encrypted messages based on a shared secret key. Typically the parties will use some key agreement protocol (such as X3DH [1]) to agree on the shared secret key. Following this, the parties will use the Double Ratchet to send and receive encrypted messages. The parties derive new keys for every Double Ratchet message so that earlier keys cannot be calculated from later ones. -
Security Analysis of the Signal Protocol Student: Bc
ASSIGNMENT OF MASTER’S THESIS Title: Security Analysis of the Signal Protocol Student: Bc. Jan Rubín Supervisor: Ing. Josef Kokeš Study Programme: Informatics Study Branch: Computer Security Department: Department of Computer Systems Validity: Until the end of summer semester 2018/19 Instructions 1) Research the current instant messaging protocols, describe their properties, with a particular focus on security. 2) Describe the Signal protocol in detail, its usage, structure, and functionality. 3) Select parts of the protocol with a potential for security vulnerabilities. 4) Analyze these parts, particularly the adherence of their code to their documentation. 5) Discuss your findings. Formulate recommendations for the users. References Will be provided by the supervisor. prof. Ing. Róbert Lórencz, CSc. doc. RNDr. Ing. Marcel Jiřina, Ph.D. Head of Department Dean Prague January 27, 2018 Czech Technical University in Prague Faculty of Information Technology Department of Computer Systems Master’s thesis Security Analysis of the Signal Protocol Bc. Jan Rub´ın Supervisor: Ing. Josef Kokeˇs 1st May 2018 Acknowledgements First and foremost, I would like to express my sincere gratitude to my thesis supervisor, Ing. Josef Kokeˇs,for his guidance, engagement, extensive know- ledge, and willingness to meet at our countless consultations. I would also like to thank my brother, Tom´aˇsRub´ın,for proofreading my thesis. I cannot express enough gratitude towards my parents, Lenka and Jaroslav Rub´ınovi, who supported me both morally and financially through my whole studies. Last but not least, this thesis would not be possible without Anna who re- lentlessly supported me when I needed it most. Declaration I hereby declare that the presented thesis is my own work and that I have cited all sources of information in accordance with the Guideline for adhering to ethical principles when elaborating an academic final thesis. -
Analysis and Implementation of the Messaging Layer Security Protocol
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by AMS Tesi di Laurea Alma Mater Studiorum · Universita` di Bologna CAMPUS DI CESENA Dipartimento di Informatica - Scienza e Ingegneria Corso di Laurea Magistrale in Ingegneria e Scienze Informatiche Analysis and Implementation of the Messaging Layer Security Protocol Tesi in Sicurezza delle Reti Relatore: Presentata da: Gabriele D'Angelo Nicola Giancecchi Anno Accademico 2018/2019 Parole chiave Network Security Messaging MLS Protocol Ratchet Trees \Oh me, oh vita! Domande come queste mi perseguitano. Infiniti cortei d'infedeli, citt`agremite di stolti, che v'`edi nuovo in tutto questo, oh me, oh vita! Risposta: Che tu sei qui, che la vita esiste e l’identit`a. Che il potente spettacolo continua, e che tu puoi contribuire con un verso." - Walt Whitman Alla mia famiglia. Introduzione L'utilizzo di servizi di messaggistica su smartphone `eincrementato in maniera considerevole negli ultimi anni, complice la sempre maggiore disponi- bilit`adi dispositivi mobile e l'evoluzione delle tecnologie di comunicazione via Internet, fattori che hanno di fatto soppiantato l'uso dei classici SMS. Tale incremento ha riguardato anche l'utilizzo in ambito business, un contesto dove `epi`ufrequente lo scambio di informazioni confidenziali e quindi la necessit`adi proteggere la comunicazione tra due o pi`upersone. Ci`onon solo per un punto di vista di sicurezza, ma anche di privacy personale. I maggiori player mondiali hanno risposto implementando misure di sicurezza all'interno dei propri servizi, quali ad esempio la crittografia end-to-end e regole sempre pi`ustringenti sul trattamento dei dati personali. -

Recognition and Investigation of Listening in Anonymous Communication Systems 1 K
AEGAEUM JOURNAL ISSN NO: 0776-3808 Recognition and investigation of listening in anonymous communication systems 1 K. Balasubramanian, 2 Dr. S. Kannan, 3 S. Sharmila 1Associate Professor, Department of CSE, E.G.S Pillay Engineering College, Nagapattinam, Tamil Nadu, India. Email: [email protected] 2, Professor, Department of CSE, E.G.S Pillay Engineering College, Nagapattinam, Tamil Nadu, India. 3, P.G Student, Department of CSE, E.G.S Pillay Engineering College, Nagapattinam, Tamil Nadu, India. Abstract components through which client activity is steered can Mysterious correspondence systems similar to listen in and get delicate information, for example, user Tor, mostly secure the secrecy of client activity by verification qualifications. This circumstance can scrambling all interchanges inside the overlay system. conceivably decline when clients utilize intermediary based frameworks to get to similar administrations However, when the transferred activity achieves the without utilizing end-to-end encryption, as the quantity limits of the system, toward its end, the first client of hosts or hubs that can listen stealthily on their activity is definitely presented to the last node on the movement increments. Different open and private path. Accordingly, users sending sensitive information, systems may square access to interpersonal interaction similar to verification accreditations, over such and other prominent online administrations for systems, risk having their information between different reasons. Under these conditions, users accepted and uncovered, unless end-to-end encryption regularly depend on utilizing disseminated proxying frameworks to prevent their activity from being is utilized. Listening can be performed by malicious or filtered. They fall back on such mechanisms so as to compromised relay nodes, and additionally any rebel evade system activity filtering in light of source, goal, arrange substance on the way toward the actual end.