Embedded Electronic Systems and Microcontrollers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Arm Cortex-R52
Arm Cortex-R52 Product Brief Benefits Overview 1. Software Separation The Cortex-R52 is the most advanced processor in the Cortex-R family delivering real-time Robust hardware-enforced software performance for functional safety. As the first Armv8-R processor, Cortex-R52 introduces separation provides confidence that support for a hypervisor, simplifying software integration with robust separation to protect software functions can’t interfere with safety-critical code, while maintaining real-time deterministic operation required in high each other. For safety-related tasks, dependable control systems. this can mean less code needs to be certified, saving time, cost and effort. Cortex-R52 addresses a range of applications such as high performance domain controllers for vehicle powertrain and chassis systems or as a safety island providing 2. Multiple OS upportS protection in complex ADAS and Autonomous Drive systems. Virtualization support gives developers flexibility, readily allowing consolidation Safety Ready of applications using multiple operating systems within a single CPU. This eases Arm Cortex-R52 is part of Arm’s Safety Ready portfolio, a collection of Arm IP that the addition of functionality without have been through various and rigorous levels of functional safety systematic flows growing the number of electronic and development. control units. Learn more at www.arm.com/safety 3. Real-Time Performance High-performance multicore clusters of Cortex-R52 CPUs deliver real-time responsiveness for deterministic systems with the lowest Cortex-R latency. 1 Specifications Architecture Armv8-R Arm and Thumb-2. Supports DSP instructions and a configurable Floating-Point Unit either with Instruction Set single-precision or double precision and Neon. -

Atmel SMART | SAM V7: Cortex-M7 Tutorial Using the SAMV7 Xplained ULTRA Evaluation Board ARM Keil MDK 5 Toolkit Summer 2017 V 1.83 [email protected]
Atmel SMART | SAM V7: Cortex-M7 Tutorial Using the SAMV7 Xplained ULTRA evaluation board ARM Keil MDK 5 Toolkit Summer 2017 V 1.83 [email protected] Introduction: The latest version of this document is here: www.keil.com/appnotes/docs/apnt_274.asp The purpose of this lab is to introduce you to the Atmel Cortex®-M7 processor using the ARM® Keil® MDK toolkit featuring the IDE μVision®. We will demonstrate all debugging features available on this processer including Serial Wire Viewer and ETM instruction trace. At the end of this tutorial, you will be able to confidently work with these processors and Keil MDK. We recommend you obtain the new Getting Started MDK 5: from here: www.keil.com/gsg/. Keil Atmel Information Page: See www.keil.com/atmel. Keil MDK supports and has examples for most Atmel ARM processors and boards. Check the Keil Device Database® on www.keil.com/dd2 for the complete list. Additional information is listed in www.keil.com/Atmel/. Linux: Atmel ARM processors running Linux and Android are supported by ARM DS-5™. http://www.arm.com/ds5. Keil MDK-Lite™ is a free evaluation version that limits code size to 32 Kbytes. Nearly all Keil examples will compile within this 32K limit. The addition of a valid license number will turn it into a commercial version. Contact Keil Sales for details. Atmel 8051 Processors: Keil has development tools for many Atmel 8051 processors. See www.keil.com/Atmel/ for details. Atmel | Start: µVision is compatible with the Atmel | START configuration program. -
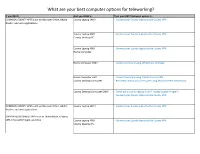
What Are Your Best Computer Options for Teleworking?
What are your best computer options for teleworking? If you NEED… And you HAVE a… Then your BEST telework option is… COMMON COUNTY APPS such as Microsoft Office, Adobe County Laptop ONLY - Connect your County laptop to the County VPN Reader, and web applications County Laptop AND - Connect your County laptop to the County VPN County Desktop PC County Laptop AND - Connect your County laptop to the County VPN Home Computer Home Computer ONLY - Connect remotely using VDI (Virtual Desktop) Home Computer AND - Connect remotely using Dakota County VPN County Desktop Computer - Remotely control your computer using Windows Remote Desktop County Desktop Computer ONLY - Check out a County laptop from IT Laptop Loaner Program - Connect your County laptop to the County VPN COMMON COUNTY APPS such as Microsoft Office, Adobe County Laptop ONLY - Connect your County laptop to the County VPN Reader, and web applications SUPPORTED BUSINESS APPS such as OneSolution, OnBase, SIRE, Microsoft Project, and Visio County Laptop AND - Connect your County laptop to the County VPN County Desktop PC If you NEED… And you HAVE a… Then your BEST telework option is… County Laptop AND - Connect your County laptop to the County VPN Home Computer Home Computer ONLY - Contact the County IT Help Desk at 651/438-4346 Home Computer AND - Connect remotely using Dakota County VPN County Desktop Computer - Remotely control your computer using Windows Remote Desktop County Desktop Computer ONLY - Check out a County laptop from IT Laptop Loaner Program - Connect your County laptop -
Insider's Guide STM32
The Insider’s Guide To The STM32 ARM®Based Microcontroller An Engineer’s Introduction To The STM32 Series www.hitex.com Published by Hitex (UK) Ltd. ISBN: 0-9549988 8 First Published February 2008 Hitex (UK) Ltd. Sir William Lyons Road University Of Warwick Science Park Coventry, CV4 7EZ United Kingdom Credits Author: Trevor Martin Illustrator: Sarah Latchford Editors: Michael Beach, Alison Wenlock Cover: Wolfgang Fuller Acknowledgements The author would like to thank M a t t Saunders and David Lamb of ST Microelectronics for their assistance in preparing this book. © Hitex (UK) Ltd., 21/04/2008 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical or photocopying, recording or otherwise without the prior written permission of the Publisher. Contents Contents 1. Introduction 4 1.1 So What Is Cortex?..................................................................................... 4 1.2 A Look At The STM32 ................................................................................ 5 1.2.1 Sophistication ............................................................................................. 5 1.2.2 Safety ......................................................................................................... 6 1.2.3 Security ....................................................................................................... 6 1.2.4 Software Development .............................................................................. -

ARM Architecture
ARM Architecture Comppgzuter Organization and Assembly ygg Languages Yung-Yu Chuang with slides by Peng-Sheng Chen, Ville Pietikainen ARM history • 1983 developed by Acorn computers – To replace 6502 in BBC computers – 4-man VLSI design team – Its simp lic ity comes from the inexper ience team – Match the needs for generalized SoC for reasonable power, performance and die size – The first commercial RISC implemenation • 1990 ARM (Advanced RISC Mac hine ), owned by Acorn, Apple and VLSI ARM Ltd Design and license ARM core design but not fabricate Why ARM? • One of the most licensed and thus widespread processor cores in the world – Used in PDA, cell phones, multimedia players, handheld game console, digital TV and cameras – ARM7: GBA, iPod – ARM9: NDS, PSP, Sony Ericsson, BenQ – ARM11: Apple iPhone, Nokia N93, N800 – 90% of 32-bit embedded RISC processors till 2009 • Used especially in portable devices due to its low power consumption and reasonable performance ARM powered products ARM processors • A simple but powerful design • A whlhole filfamily of didesigns shiharing siilimilar didesign principles and a common instruction set Naming ARM •ARMxyzTDMIEJFS – x: series – y: MMU – z: cache – T: Thumb – D: debugger – M: Multiplier – I: EmbeddedICE (built-in debugger hardware) – E: Enhanced instruction – J: Jazell e (JVM) – F: Floating-point – S: SthiiblSynthesizible version (source code version for EDA tools) Popular ARM architectures •ARM7TDMI – 3 pipe line stages (ft(fetc h/deco de /execu te ) – High code density/low power consumption – One of the most used ARM-version (for low-end systems) – All ARM cores after ARM7TDMI include TDMI even if they do not include TDMI in their labels • ARM9TDMI – Compatible with ARM7 – 5 stages (fe tc h/deco de /execu te /memory /wr ite ) – Separate instruction and data cache •ARM11 ARM family comparison year 1995 1997 1999 2003 ARM is a RISC • RISC: simple but powerful instructions that execute within a single cycle at high clock speed. -

Resource Guide: Workstation Productivity
Resource Guide: Workstation Productivity Contents Beyond the Desktop: Workstation Productivity ……………………………………………………2 Find out how to get the highest productivity possible from high performance applications that require more power than traditional desktop computers Top IT Considerations for Mobile Workstations …………………...............................................4 Discover the top IT considerations for organization that require mobile workstations designed to provide a balance of performance and portability Maximum Management and Control with Virtualized Workstations ....…………………...…….6 Explore the benefits of virtualization to ensure the greatest possible management and control of high performance workstations for the most demanding workloads and applications Sponsored by: Page 1 of 6 Copyright © MMIX, CBS Broadcasting Inc. All Rights Reserved. For more downloads and a free TechRepublic membership, please visit http://techrepublic.com.com/2001-6240-0.html TechRepublic Resource Guide: Workstations Productivity Beyond the Desktop: Workstation Productivity Find out how to get the highest productivity possible from high performance applications that require more power than traditional desktop computers Desktop computers have come a long way in terms of value and performance for the average user but more advanced applications now require even more in terms of processing, graphics, memory and storage. The following is a brief overview of the differences between standard desktops and workstations as well as the implications for overall performance and productivity as compiled from the editorial resources of CNET, TechRepublic and ZDNet.com. Think Inside the Box A lot of people tend to think of desktop computers and computer workstation as one and the same but that isn’t always the case in terms of power and performance. In fact, many of today’s most demanding workloads and applications for industries such as engineering, entertainment, finance, manufacturing, and science actually require much higher functionality than what traditional desktops have to offer. -

Good Reasons to Use a Desktop Computer
Good reasons to use a desktop computer Why would anyone possibly need a desktop? For most, it goes against all common sense to use a desktop because they're not as convenient and portable as a lap- top, and a laptop does what you need it to do just fine. At the same time, the good ol' bulky, stationary desktop still has a place for many people. Here are good reasons why you might want to use desktop computer. You can upgrade the parts, which is cheaper than buying a new laptop. When a laptop starts to slow down, your only option is to buy a whole new one. Depending on what you need a com- puter for, a new laptop could cost thousands of dollars. That's because you have to buy every single part inside the laptop brand new — the processor, motherboard, RAM, hard drive, and everything else. But most of the parts in your old laptop are probably still fine, and it's usually only the processor (and the motherboard it sits on) that needs upgrading. With a desktop you can easily replace an aging processor (and motherboard) for around $300. That said, all-in-one desktops like the iMac can be a little difficult to upgrade. You get more bang for your buck. Depending on the brand, desktops and laptops with similar specs can often cost the same. Yet, the main differences between the two are the processor and the graphics processor. Most Laptops use the smaller mobile version of a processor model, which often aren't quite as powerful as the full-size desktop versions. -

OMAP-L138 DSP+ARM9™ Development Kit Low-Cost Development Kit to Jump-Start Real-Time Signal Processing Innovation
OMAP-L138 DSP+ARM9™ Development Kit Low-cost development kit to jump-start real-time signal processing innovation Texas Instruments’ OMAP-L138 development kit is a new, robust low-cost development board designed to spark innovative designs based on the OMAP-L138 processor. Along with TI’s new included Linux™ Software Development Kit (SDK), the OMAP-L138 development kit is ideal for power- optimized, networked applications including industrial control, medical diagnostics and communications. It includes the OMAP-L138 baseboard, SD cards with a Linux demo, DSP/BIOS™ kernel and SDK, and Code Composer Studio™ (CCStudio) Integrated Development Environment (IDE), a power supply and cord, VGA cable and USB cable. Technical details • SATA port (3 Gbps) Key features and benefi ts The OMAP-L138 development kit is based • VGA port (15-pin D-SUB) • OMAP-L138 DSP+ARM9 software and on the OMAP-L138 DSP+ARM9 processor, a • LCD port (Beagleboard-XM connectors) development kit to jump-start real-time low-power applications processor based on • 3 audio ports signal processing innovation an ARM926EJ-S and a TMS320C674x DSP • Reduces design work with downloadable core. It provides signifi cantly lower power • 1 line in and duplicable board schematics and than other members of the TMS320C6000™ • 1 line out design fi les platform of DSPs. The OMAP-L138 processor • 1 MIC in • Fast and easy development of applica- enables developers to quickly design and • Composite in (RCA jack) tions requiring fi ngerprint recognition and develop devices featuring robust operating • Leopard Imaging camera sensor input (32- face detection with embedded analytics systems support and rich user interfaces with pin ZIP connector) • Low-power OMAP-L138 DSP+ a fully integrated mixed-processor solution. -

Today Computers Are All Around Us. from Desktop Computers To
Today computers are all around us. From desktop computers to smartphones, they're changing the way that we live our lives. But have you ever asked yourself what exactly is a computer? A computer is an electronic device that manipulates information or data. The computer sees data as ones and zeros but it knows how to combine them into more complex things such as a photograph, a movie, a website, a game and much more... Computers use a combination of hardware and software. Hardware is any physical part of the computer which includes all of the internal components and also the external parts like the monitor and keyboard. Software is any set of instructions that tells the hardware what to do such as a web browser, media player or word processor. Now when most people say computer, they're talking about a personal computer. This can be a desktop computer or a laptop computer which has basically the same capabilities but in a more portable package. Personal computers come in two main styles, PC and Mac. PCs are the most common types, there are many different companies that make them and they usually come with the Microsoft Windows operating system. Macs or Macintosh computers are all made by one company, Apple, and they come with the Mac OS 10 operating system. Computers come in many other shapes and sizes, mobile phones, tablets, game consoles and even TVs have built-in computers, although they may not do everything a desktop or laptop can. There is another type of computer that plays an important role in our lives, servers. -
Desktop Computer Replacement Program Date: May 22, 2019 From: Information Technology Department Presentation Steve Ely, I.T
CITY COUNCIL AGENDA REPORT MEETING DATE: JUNE 4, 2019 ITEM NUMBER: CC-7 SUBJECT: DESKTOP COMPUTER REPLACEMENT PROGRAM DATE: MAY 22, 2019 FROM: INFORMATION TECHNOLOGY DEPARTMENT PRESENTATION STEVE ELY, I.T. DIRECTOR BY: FOR FURTHER INFORMATION STEVE ELY, I.T. DIRECTOR, 714-754-4891 CONTACT: RECOMMENDATION: Staff recommends that the City Council: 1 . Approve the Desktop Computer Replacement Program for the purchase of 435 desktop computers in three phases to replace the computers that have already reached their end-of-life stage. 2. Approve and authorize the Acting City Manager to execute a purchase order with Dell Marketing, LP. (Dell) in the amount of $166,266.27 for completion of the first phase of the Desktop Computer Replacement Program, which includes the purchase of 140 desktop computers. BACKGROUND: The City purchased 435 desktop computers in 2013. These computers have long passed their life expectancy. Their warranty expired in 2016, which makes them prone to issues and causes staff to have to troubleshoot or make repairs as much as they can. In addition to dedicating time for repairs, parts may become obsolete or costly to obtain, resulting in the necessity to purchase new equipment. Desktop computers are the most heavily used pieces of equipment and upgrading them will allow employees to be more efficient in their daily duties and provide the assurance that data and information will not be lost due to aging equipment. ANALYSIS: Many department computers have exceeded their useful life and become inefficient in performing normal functions. Over time, these resources wear, age, 1 and/or become obsolete, causing performance degradation, excessive support and repair activity, and loss of reliability. -

Μc/OS-II™ Real-Time Operating System
μC/OS-II™ Real-Time Operating System DESCRIPTION APPLICATIONS μC/OS-II is a portable, ROMable, scalable, preemptive, real-time ■ Avionics deterministic multitasking kernel for microprocessors, ■ Medical equipment/devices microcontrollers and DSPs. Offering unprecedented ease-of-use, ■ Data communications equipment μC/OS-II is delivered with complete 100% ANSI C source code and in-depth documentation. μC/OS-II runs on the largest number of ■ White goods (appliances) processor architectures, with ports available for download from the ■ Mobile Phones, PDAs, MIDs Micrium Web site. ■ Industrial controls μC/OS-II manages up to 250 application tasks. μC/OS-II includes: ■ Consumer electronics semaphores; event flags; mutual-exclusion semaphores that eliminate ■ Automotive unbounded priority inversions; message mailboxes and queues; task, time and timer management; and fixed sized memory block ■ A wide-range of embedded applications management. FEATURES μC/OS-II’s footprint can be scaled (between 5 Kbytes to 24 Kbytes) to only contain the features required for a specific application. The ■ Unprecedented ease-of-use combined with an extremely short execution time for most services provided by μC/OS-II is both learning curve enables rapid time-to-market advantage. constant and deterministic; execution times do not depend on the number of tasks running in the application. ■ Runs on the largest number of processor architectures with ports easily downloaded. A validation suite provides all documentation necessary to support the use of μC/OS-II in safety-critical systems. Specifically, μC/OS-II is ■ Scalability – Between 5 Kbytes to 24 Kbytes currently implemented in a wide array of high level of safety-critical ■ Max interrupt disable time: 200 clock cycles (typical devices, including: configuration, ARM9, no wait states). -

Connecting an LCD Projector to a Desktop Computer
Connecting an LCD Projector to a Desktop Computer INSTRUCTIONS 1. Disconnect the computer monitor cable from the back of the computer. Splitter Into 2. Connect the splitter to the Computer monitor port of the computer. Monitor Port 3. Connect the computer monitor cable to one end of the splitter. 4. Connect one end of the long Computer projector cable to the other end of Monitor the splitter. Long Cable Cable to Projector 5. Connect the other end of the long projector cable to the projector at Projector’s the "computer in" (not “monitor On/Off Switch out”) port. (Look varies depending on model; 6. Make sure the projector’s power might be a different cable is plugged into an electrical color) outlet. Long 7. All projectors have an on/off Projector switch. Press once to power on the lamp. Press twice to power off Cable Into the lamp. The fan will continue to Projector run after the lamp is powered off. Projector’s DO NOT UNPLUG THE Power Cable PROJECTOR UNTIL THE FAN STOPS RUNNING! CAUTION: Do not EVER look directly into the lamp of the projector or allow a student to do so. 8. Adjust the “feet” on the projector to get the correct height for the Permanent damage to vision can occur. projection. Depending on the model of projector, “feet” might be on the TROUBLESHOOTING bottom of any corner or in the If there is no computer image projected: middle front. 1. Make sure computer is powered on and logged in. 2. Make sure the projector is powered on.