Hypergraph Representation Learning for Higher Order Tasks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Practical Parallel Hypergraph Algorithms
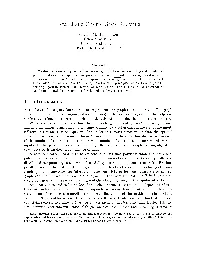
Practical Parallel Hypergraph Algorithms Julian Shun [email protected] MIT CSAIL Abstract v While there has been signicant work on parallel graph pro- 0 cessing, there has been very surprisingly little work on high- e0 performance hypergraph processing. This paper presents v0 v1 v1 a collection of ecient parallel algorithms for hypergraph processing, including algorithms for betweenness central- e1 ity, maximal independent set, k-core decomposition, hyper- v2 trees, hyperpaths, connected components, PageRank, and v2 v3 e single-source shortest paths. For these problems, we either 2 provide new parallel algorithms or more ecient implemen- v3 tations than prior work. Furthermore, our algorithms are theoretically-ecient in terms of work and depth. To imple- (a) Hypergraph (b) Bipartite representation ment our algorithms, we extend the Ligra graph processing Figure 1. An example hypergraph representing the groups framework to support hypergraphs, and our implementa- , , , , , , and , , and its bipartite repre- { 0 1 2} { 1 2 3} { 0 3} tions benet from graph optimizations including switching sentation. between sparse and dense traversals based on the frontier size, edge-aware parallelization, using buckets to prioritize processing of vertices, and compression. Our experiments represented as hyperedges, can contain an arbitrary number on a 72-core machine and show that our algorithms obtain of vertices. Hyperedges correspond to group relationships excellent parallel speedups, and are signicantly faster than among vertices (e.g., a community in a social network). An algorithms in existing hypergraph processing frameworks. example of a hypergraph is shown in Figure 1a. CCS Concepts • Computing methodologies → Paral- Hypergraphs have been shown to enable richer analy- lel algorithms; Shared memory algorithms. -

Forbidden Subgraph Characterization of Quasi-Line Graphs Medha Dhurandhar [email protected]
Forbidden Subgraph Characterization of Quasi-line Graphs Medha Dhurandhar [email protected] Abstract: Here in particular, we give a characterization of Quasi-line Graphs in terms of forbidden induced subgraphs. In general, we prove a necessary and sufficient condition for a graph to be a union of two cliques. 1. Introduction: A graph is a quasi-line graph if for every vertex v, the set of neighbours of v is expressible as the union of two cliques. Such graphs are more general than line graphs, but less general than claw-free graphs. In [2] Chudnovsky and Seymour gave a constructive characterization of quasi-line graphs. An alternative characterization of quasi-line graphs is given in [3] stating that a graph has a fuzzy reconstruction iff it is a quasi-line graph and also in [4] using the concept of sums of Hoffman graphs. Here we characterize quasi-line graphs in terms of the forbidden induced subgraphs like line graphs. We consider in this paper only finite, simple, connected, undirected graphs. The vertex set of G is denoted by V(G), the edge set by E(G), the maximum degree of vertices in G by Δ(G), the maximum clique size by (G) and the chromatic number by G). N(u) denotes the neighbourhood of u and N(u) = N(u) + u. For further notation please refer to Harary [3]. 2. Main Result: Before proving the main result we prove some lemmas, which will be used later. Lemma 1: If G is {3K1, C5}-free, then either 1) G ~ K|V(G)| or 2) If v, w V(G) are s.t. -

When the Vertex Coloring of a Graph Is an Edge Coloring of Its Line Graph — a Rare Coincidence
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Repository of the Academy's Library When the vertex coloring of a graph is an edge coloring of its line graph | a rare coincidence Csilla Bujt¶as 1;¤ E. Sampathkumar 2 Zsolt Tuza 1;3 Charles Dominic 2 L. Pushpalatha 4 1 Department of Computer Science and Systems Technology, University of Pannonia, Veszpr¶em,Hungary 2 Department of Mathematics, University of Mysore, Mysore, India 3 Alfr¶edR¶enyi Institute of Mathematics, Hungarian Academy of Sciences, Budapest, Hungary 4 Department of Mathematics, Yuvaraja's College, Mysore, India Abstract The 3-consecutive vertex coloring number Ã3c(G) of a graph G is the maximum number of colors permitted in a coloring of the vertices of G such that the middle vertex of any path P3 ½ G has the same color as one of the ends of that P3. This coloring constraint exactly means that no P3 subgraph of G is properly colored in the classical sense. 0 The 3-consecutive edge coloring number Ã3c(G) is the maximum number of colors permitted in a coloring of the edges of G such that the middle edge of any sequence of three edges (in a path P4 or cycle C3) has the same color as one of the other two edges. For graphs G of minimum degree at least 2, denoting by L(G) the line graph of G, we prove that there is a bijection between the 3-consecutive vertex colorings of G and the 3-consecutive edge col- orings of L(G), which keeps the number of colors unchanged, too. -

Counting Independent Sets in Graphs with Bounded Bipartite Pathwidth∗
Counting independent sets in graphs with bounded bipartite pathwidth∗ Martin Dyery Catherine Greenhillz School of Computing School of Mathematics and Statistics University of Leeds UNSW Sydney, NSW 2052 Leeds LS2 9JT, UK Australia [email protected] [email protected] Haiko M¨uller∗ School of Computing University of Leeds Leeds LS2 9JT, UK [email protected] 7 August 2019 Abstract We show that a simple Markov chain, the Glauber dynamics, can efficiently sample independent sets almost uniformly at random in polynomial time for graphs in a certain class. The class is determined by boundedness of a new graph parameter called bipartite pathwidth. This result, which we prove for the more general hardcore distribution with fugacity λ, can be viewed as a strong generalisation of Jerrum and Sinclair's work on approximately counting matchings, that is, independent sets in line graphs. The class of graphs with bounded bipartite pathwidth includes claw-free graphs, which generalise line graphs. We consider two further generalisations of claw-free graphs and prove that these classes have bounded bipartite pathwidth. We also show how to extend all our results to polynomially-bounded vertex weights. 1 Introduction There is a well-known bijection between matchings of a graph G and independent sets in the line graph of G. We will show that we can approximate the number of independent sets ∗A preliminary version of this paper appeared as [19]. yResearch supported by EPSRC grant EP/S016562/1 \Sampling in hereditary classes". zResearch supported by Australian Research Council grant DP190100977. 1 in graphs for which all bipartite induced subgraphs are well structured, in a sense that we will define precisely. -

General Approach to Line Graphs of Graphs 1
DEMONSTRATIO MATHEMATICA Vol. XVII! No 2 1985 Antoni Marczyk, Zdzislaw Skupien GENERAL APPROACH TO LINE GRAPHS OF GRAPHS 1. Introduction A unified approach to the notion of a line graph of general graphs is adopted and proofs of theorems announced in [6] are presented. Those theorems characterize five different types of line graphs. Both Krausz-type and forbidden induced sub- graph characterizations are provided. So far other authors introduced and dealt with single spe- cial notions of a line graph of graphs possibly belonging to a special subclass of graphs. In particular, the notion of a simple line graph of a simple graph is implied by a paper of Whitney (1932). Since then it has been repeatedly introduc- ed, rediscovered and generalized by many authors, among them are Krausz (1943), Izbicki (1960$ a special line graph of a general graph), Sabidussi (1961) a simple line graph of a loop-free graph), Menon (1967} adjoint graph of a general graph) and Schwartz (1969; interchange graph which coincides with our line graph defined below). In this paper we follow another way, originated in our previous work [6]. Namely, we distinguish special subclasses of general graphs and consider five different types of line graphs each of which is defined in a natural way. Note that a similar approach to the notion of a line graph of hypergraphs can be adopted. We consider here the following line graphsi line graphs, loop-free line graphs, simple line graphs, as well as augmented line graphs and augmented loop-free line graphs. - 447 - 2 A. Marczyk, Z. -
Parallel and On-Line Graph Coloring 1 Introduction
Parallel and Online Graph Coloring Magns M Halldrsson Science Institute University of Iceland IS Reykjavik Iceland Abstract We discover a surprising connection b etween graph coloring in two orthogonal paradigms parallel and online computing We present a randomized online coloring algorithm with p a p erformance ratio of O n log n an improvement of log n factor over the previous b est known algorithm of Vishwanathan Also from the same principles we construct a parallel coloring algorithm with the same p erformance ratio for the rst such result As a byproduct we obtain a parallel approximation for the indep endent set problem Introduction At the heart of most partition and allo cation problems is a graph coloring question The graph coloring problem involves assigning values or colors to the vertices of a graph so that adjacent vertices are assigned distinct colors with the ob jective of minimizing the number of colors used We seek graph coloring algorithms that are b oth eective and ecient Eciency means among other things using computation time b ounded by a p olynomial in the size of the input Eectiveness means that the quality of the coloring is never much worse than the optimal coloring it is measured in terms of the performance ratio of the algorithm dened as the ratio of the number of colors used to the minimum number of colors needed maximized over all inputs In this pap er we present a reasonably eective and ecient graph coloring algorithm that yields b oth parallel and online algorithms A parallel algorithm is said to b e ecient -

Effective and Efficient Dynamic Graph Coloring
Effective and Efficient Dynamic Graph Coloring Long Yuanx, Lu Qinz, Xuemin Linx, Lijun Changy, and Wenjie Zhangx x The University of New South Wales, Australia zCentre for Quantum Computation & Intelligent Systems, University of Technology, Sydney, Australia y The University of Sydney, Australia x{longyuan,lxue,zhangw}@cse.unsw.edu.au; [email protected]; [email protected] ABSTRACT (1) Nucleic Acid Sequence Design in Biochemical Networks. Given Graph coloring is a fundamental graph problem that is widely ap- a set of nucleic acids, a dependency graph is a graph in which each plied in a variety of applications. The aim of graph coloring is to vertex is a nucleotide and two vertices are connected if the two minimize the number of colors used to color the vertices in a graph nucleotides form a base pair in at least one of the nucleic acids. such that no two incident vertices have the same color. Existing The problem of finding a nucleic acid sequence that is compatible solutions for graph coloring mainly focus on computing a good col- with the set of nucleic acids can be modelled as a graph coloring oring for a static graph. However, since many real-world graphs are problem on a dependency graph [57]. highly dynamic, in this paper, we aim to incrementally maintain the (2) Air Traffic Flow Management. In air traffic flow management, graph coloring when the graph is dynamically updated. We target the air traffic flow can be considered as a graph in which each vertex on two goals: high effectiveness and high efficiency. -

On the Theory of Point Weight Designs Royal Holloway
On the theory of Point Weight Designs Alexander W. Dent Technical Report RHUL–MA–2003–2 26 March 2001 Royal Holloway University of London Department of Mathematics Royal Holloway, University of London Egham, Surrey TW20 0EX, England http://www.rhul.ac.uk/mathematics/techreports Abstract A point-weight incidence structure is a structure of blocks and points where each point is associated with a positive integer weight. A point-weight design is a point-weight incidence structure where the sum of the weights of the points on a block is constant and there exist some condition that specifies the number of blocks that certain sets of points lie on. These structures share many similarities to classical designs. Chapter one provides an introduction to design theory and to some of the existing theory of point-weight designs. Chapter two develops a new type of point-weight design, termed a row-sum point-weight design, that has some of the matrix properties of classical designs. We examine the combinatorial aspects of these designs and show that a Fisher inequality holds and that this is dependent on certain combinatorial properties of the points of minimal weight. We define these points, and the designs containing them, to be either ‘awkward’ or ‘difficult’ depending on these properties. Chapter three extends the combinatorial analysis of row-sum point-weight designs. We examine structures that are simultaneously row-sum and point-sum point-weight designs, paying particular attention to the question of regularity. We also present several general construction techniques and specific examples of row-sum point-weight designs that are generated using these techniques. -

Multilevel Hypergraph Partitioning with Vertex Weights Revisited
Multilevel Hypergraph Partitioning with Vertex Weights Revisited Tobias Heuer ! Karlsruhe Institute of Technology, Karlsruhe, Germany Nikolai Maas ! Karlsruhe Institute of Technology, Karlsruhe, Germany Sebastian Schlag ! Karlsruhe Institute of Technology, Karlsruhe, Germany Abstract The balanced hypergraph partitioning problem (HGP) is to partition the vertex set of a hypergraph into k disjoint blocks of bounded weight, while minimizing an objective function defined on the hyperedges. Whereas real-world applications often use vertex and edge weights to accurately model the underlying problem, the HGP research community commonly works with unweighted instances. In this paper, we argue that, in the presence of vertex weights, current balance constraint definitions either yield infeasible partitioning problems or allow unnecessarily large imbalances and propose a new definition that overcomes these problems. We show that state-of-the-art hypergraph partitioners often struggle considerably with weighted instances and tight balance constraints (even with our new balance definition). Thus, we present a recursive-bipartitioning technique that isable to reliably compute balanced (and hence feasible) solutions. The proposed method balances the partition by pre-assigning a small subset of the heaviest vertices to the two blocks of each bipartition (using an algorithm originally developed for the job scheduling problem) and optimizes the actual partitioning objective on the remaining vertices. We integrate our algorithm into the multilevel hypergraph -

On Decomposing a Hypergraph Into K Connected Sub-Hypergraphs
Egervary´ Research Group on Combinatorial Optimization Technical reportS TR-2001-02. Published by the Egrerv´aryResearch Group, P´azm´any P. s´et´any 1/C, H{1117, Budapest, Hungary. Web site: www.cs.elte.hu/egres . ISSN 1587{4451. On decomposing a hypergraph into k connected sub-hypergraphs Andr´asFrank, Tam´asKir´aly,and Matthias Kriesell February 2001 Revised July 2001 EGRES Technical Report No. 2001-02 1 On decomposing a hypergraph into k connected sub-hypergraphs Andr´asFrank?, Tam´asKir´aly??, and Matthias Kriesell??? Abstract By applying the matroid partition theorem of J. Edmonds [1] to a hyper- graphic generalization of graphic matroids, due to M. Lorea [3], we obtain a gen- eralization of Tutte's disjoint trees theorem for hypergraphs. As a corollary, we prove for positive integers k and q that every (kq)-edge-connected hypergraph of rank q can be decomposed into k connected sub-hypergraphs, a well-known result for q = 2. Another by-product is a connectivity-type sufficient condition for the existence of k edge-disjoint Steiner trees in a bipartite graph. Keywords: Hypergraph; Matroid; Steiner tree 1 Introduction An undirected graph G = (V; E) is called connected if there is an edge connecting X and V X for every nonempty, proper subset X of V . Connectivity of a graph is equivalent− to the existence of a spanning tree. As a connected graph on t nodes contains at least t 1 edges, one has the following alternative characterization of connectivity. − Proposition 1.1. A graph G = (V; E) is connected if and only if the number of edges connecting distinct classes of is at least t 1 for every partition := V1;V2;:::;Vt of V into non-empty subsets.P − P f g ?Department of Operations Research, E¨otv¨osUniversity, Kecskem´etiu. -

Hypergraph Packing and Sparse Bipartite Ramsey Numbers
Hypergraph packing and sparse bipartite Ramsey numbers David Conlon ∗ Abstract We prove that there exists a constant c such that, for any integer ∆, the Ramsey number of a bipartite graph on n vertices with maximum degree ∆ is less than 2c∆n. A probabilistic argument due to Graham, R¨odland Ruci´nskiimplies that this result is essentially sharp, up to the constant c in the exponent. Our proof hinges upon a quantitative form of a hypergraph packing result of R¨odl,Ruci´nskiand Taraz. 1 Introduction For a graph G, the Ramsey number r(G) is defined to be the smallest natural number n such that, in any two-colouring of the edges of Kn, there exists a monochromatic copy of G. That these numbers exist was proven by Ramsey [19] and rediscovered independently by Erd}osand Szekeres [10]. Whereas the original focus was on finding the Ramsey numbers of complete graphs, in which case it is known that t t p2 r(Kt) 4 ; ≤ ≤ the field has broadened considerably over the years. One of the most famous results in the area to date is the theorem, due to Chvat´al,R¨odl,Szemer´ediand Trotter [7], that if a graph G, on n vertices, has maximum degree ∆, then r(G) c(∆)n; ≤ where c(∆) is just some appropriate constant depending only on ∆. Their proof makes use of the regularity lemma and because of this the bound it gives on the constant c(∆) is (and is necessarily [11]) very bad. The situation was improved somewhat by Eaton [8], who proved, by using a variant of the regularity lemma, that the function c(∆) may be taken to be of the form 22c∆ . -

Hypernetwork Science: from Multidimensional Networks to Computational Topology∗
Hypernetwork Science: From Multidimensional Networks to Computational Topology∗ Cliff A. Joslyn,y Sinan Aksoy,z Tiffany J. Callahan,x Lawrence E. Hunter,x Brett Jefferson,z Brenda Praggastis,y Emilie A.H. Purvine,y Ignacio J. Tripodix March, 2020 Abstract cations, and physical infrastructure often afford a rep- resentation as such a set of entities with binary rela- As data structures and mathematical objects used tionships, and hence may be analyzed utilizing graph for complex systems modeling, hypergraphs sit nicely theoretical methods. poised between on the one hand the world of net- Graph models benefit from simplicity and a degree of work models, and on the other that of higher-order universality. But as abstract mathematical objects, mathematical abstractions from algebra, lattice the- graphs are limited to representing pairwise relation- ory, and topology. They are able to represent com- ships between entities, while real-world phenomena plex systems interactions more faithfully than graphs in these systems can be rich in multi-way relation- and networks, while also being some of the simplest ships involving interactions among more than two classes of systems representing topological structures entities, dependencies between more than two vari- as collections of multidimensional objects connected ables, or properties of collections of more than two in a particular pattern. In this paper we discuss objects. Representing group interactions is not possi- the role of (undirected) hypergraphs in the science ble in graphs natively, but rather requires either more of complex networks, and provide a mathematical complex mathematical objects, or coding schemes like overview of the core concepts needed for hypernet- “reification” or semantic labeling in bipartite graphs.