Weak Trophic Interactions and the Balance of Nature
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Backyard Food
Suggested Grades: 2nd - 5th BACKYARD FOOD WEB Wildlife Champions at Home Science Experiment 2-LS4-1: Make observations of plants and animals to compare the diversity of life in different habitats. What is a food web? All living things on earth are either producers, consumers or decomposers. Producers are organisms that create their own food through the process of photosynthesis. Photosynthesis is when a living thing uses sunlight, water and nutrients from the soil to create its food. Most plants are producers. Consumers get their energy by eating other living things. Consumers can be either herbivores (eat only plants – like deer), carnivores (eat only meat – like wolves) or omnivores (eat both plants and meat - like humans!) Decomposers are organisms that get their energy by eating dead plants or animals. After a living thing dies, decomposers will break down the body and turn it into nutritious soil for plants to use. Mushrooms, worms and bacteria are all examples of decomposers. A food web is a picture that shows how energy (food) passes through an ecosystem. The easiest way to build a food web is by starting with the producers. Every ecosystem has plants that make their own food through photosynthesis. These plants are eaten by herbivorous consumers. These herbivores are then hunted by carnivorous consumers. Eventually, these carnivores die of illness or old age and become food for decomposers. As decomposers break down the carnivore’s body, they create delicious nutrients in the soil which plants will use to live and grow! When drawing a food web, it is important to show the flow of energy (food) using arrows. -
The Soil Food Web
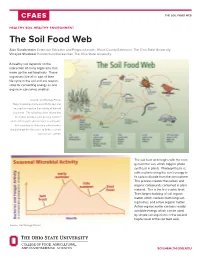
THE SOIL FOOD WEB HEALTHY SOIL HEALTHY ENVIRONMENT The Soil Food Web Alan Sundermeier Extension Educator and Program Leader, Wood County Extension, The Ohio State University. Vinayak Shedekar Postdoctural Researcher, The Ohio State University. A healthy soil depends on the interaction of many organisms that make up the soil food web. These organisms live all or part of their life cycle in the soil and are respon- sible for converting energy as one organism consumes another. Source: Soil Biology Primer The phospholipid fatty acid (PLFA) test can be used to measure the activity of the soil food web. The following chart shows that mi-crobial activity peaks in early summer when soil is warm and moisture is adequate. Soil sampling for detecting soil microbes should follow this timetable to better capture soil microbe activity. The soil food web begins with the ener- gy from the sun, which triggers photo- synthesis in plants. Photosynthesis re- sults in plants using the sun’s energy to fix carbon dioxide from the atmosphere. This process creates the carbon and organic compounds contained in plant material. This is the first trophic level. Then begins building of soil organic matter, which contains both long-last- ing humus, and active organic matter. Active organic matter contains readily available energy, which can be used by simple soil organisms in the second trophic level of the soil food web. Source: Soil Biology Primer SOILHEALTH.OSU.EDU THE SOIL FOOD WEB - PAGE 2 The second trophic level contains simple soil organisms, which Agriculture can enhance the soil food web to create more decompose plant material. -

Restoring Nature :Perspectives from the Social Sciences and Humanities / Paul H
FVUR NC-4902-2 3.23 AVAILABLE RESTORING NATURE .._._ Perspectives from the Social Sciences _i_._aaQ_ and Humanities g_• _o ot_ _._.__._ ° _° _,._ • "_ EDITED BY PAUL H. GOBSTER AND R. BRUCE HULL ISLANDPRESS Washington, D.C. • Covelo, California Copyright © 2000 by Island Press All rights reserved under International and Pan-American Copyright Conventions. No part of this book may be reproduced in any form or by any means without permission in writing from the publisher: Island Press, 1718 Connecticut Avenue, N.W.., Suite 300, Washington, DC 20009. ISLAND PRESS is a trademark of The Center for Resource Economics. No copyright claim is made in work by the following employees of the federal government: Susan C. Barro, Carol Raish, and Herbert W.. Schroeder. Grateful acknowledgment is made for permission to include the poem "Volunteer Revegetation Saturday"© 1999 by Cindy Goulder. Published by permission of the poet. Library of Congress Cataloging-in-Publication Data Restoring nature :perspectives from the social sciences and humanities / Paul H. Gobster and R. Bruce Hull, editors. p. cm. Includes bibliographical references and index. ISBN 1-55963-767-6 (cloth :alk. paper) --ISBN 1-55963-768-4 (pbk: : alk. paper) 1. Environmental sciences--Philosophy. 2. Restoration ecology. 3. Environmental management. I. Gobster, Paul H. II. Hull, R. Bruce. GE300 .R47 2000 363.7---dc21 00-009375 Printed on recycled, acid-free paper {_ Manufactured in the United States of America 10987654321 CONTENTS Acknowledgments xiii Introduction: Restoring Nature: Human Actions, Interactions, and Reactions 1 Paul H. Gobster PART1.PHILOSOPHYAND RATIONALEOF RESTORATION 1. -

Is Ecological Succession Predictable?
Is ecological succession predictable? Commissioned by Prof. dr. P. Opdam; Kennisbasis Thema 1. Project Ecosystem Predictability, Projectnr. 232317. 2 Alterra-Report 1277 Is ecological succession predictable? Theory and applications Koen Kramer Bert Brinkman Loek Kuiters Piet Verdonschot Alterra-Report 1277 Alterra, Wageningen, 2005 ABSTRACT Koen Kramer, Bert Brinkman, Loek Kuiters, Piet Verdonschot, 2005. Is ecological succession predictable? Theory and applications. Wageningen, Alterra, Alterra-Report 1277. 80 blz.; 6 figs.; 0 tables.; 197 refs. A literature study is presented on the predictability of ecological succession. Both equilibrium and nonequilibrium theories are discussed in relation to competition between, and co-existence of species. The consequences for conservation management are outlined and a research agenda is proposed focusing on a nonequilibrium view of ecosystem functioning. Applications are presented for freshwater-; marine-; dune- and forest ecosystems. Keywords: conservation management; competition; species co-existence; disturbance; ecological succession; equilibrium; nonequilibrium ISSN 1566-7197 This report can be ordered by paying € 15,- to bank account number 36 70 54 612 by name of Alterra Wageningen, IBAN number NL 83 RABO 036 70 54 612, Swift number RABO2u nl. Please refer to Alterra-Report 1277. This amount is including tax (where applicable) and handling costs. © 2005 Alterra P.O. Box 47; 6700 AA Wageningen; The Netherlands Phone: + 31 317 474700; fax: +31 317 419000; e-mail: [email protected] No part of this publication may be reproduced or published in any form or by any means, or stored in a database or retrieval system without the written permission of Alterra. Alterra assumes no liability for any losses resulting from the use of the research results or recommendations in this report. -

The Science of the Struggle for Existence on the Foundations of Ecology
P1: FpQ CY239/Cooper-FM 0 52180432 9 July 29, 2003 15:6 The Science of the Struggle for Existence On the Foundations of Ecology GREGORY J. COOPER Washington and Lee University v P1: FpQ CY239/Cooper-FM 0 52180432 9 July 29, 2003 15:6 published by the press syndicate of the university of cambridge The Pitt Building, Trumpington Street, Cambridge, United Kingdom cambridge university press The Edinburgh Building, Cambridge CB2 2RU, UK 40 West 20th Street, New York, NY 10011-4211, USA 477 Williamstown Road, Port Melbourne, VIC 3207, Australia Ruiz de Alarcon´ 13, 28014 Madrid, Spain Dock House, The Waterfront, Cape Town 8001, South Africa http://www.cambridge.org c Gregory J. Cooper 2003 This book is in copyright. Subject to statutory exception and to the provisions of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published 2003 Printed in the United Kingdom at the University Press, Cambridge Typeface Times Roman 10.25/13 pt. System LATEX 2 [TB] A catalog record for this book is available from the British Library. Library of Congress Cataloging in Publication data Cooper, Gregory John. The science of the struggle for existence : on the foundations of ecology / by Gregory Cooper. p. cm – (Cambridge studies in philosophy and biology) Includes bibliographical references (p. ). ISBN 0-521-80432-9 1. Ecology – Philosophy. I. Title. II. Series. QH540.5.C66 2003 577–dc21 2002041441 ISBN 0 521 80432 9 hardback vi P1: FpQ CY239/Cooper-FM 0 52180432 -

Metaphor and Equilibrium in Population Ecology
Biology and Philosophy 16: 463–479, 2001. © 2001 Kluwer Academic Publishers. Printed in the Netherlands. The “Balance of Nature” Metaphor and Equilibrium in Population Ecology KIM CUDDINGTON Department of Ecology and Evolutionary Biology University of Connecticut 75 N. Eagleville Rd., U-43 Storrs, CT 06269-3043, U.S.A. [email protected] Abstract. I claim that the “balance of nature” metaphor is shorthand for a paradigmatic view of nature as a beneficent force. I trace the historical origins of this concept and demonstrate that it operates today in the discipline of population ecology. Although it might be suspected that this metaphor is a pre-theoretic description of the more precisely defined notion of equi- librium, I demonstrate that “balance of nature” has constricted the meaning of mathematical equilibrium in population ecology. As well as influencing the meaning of equilibrium, the metaphor has also loaded the mathematical term with values. Environmentalists and critics use this conflation of meaning and value to their advantage. This interplay between the “balance of nature” and equilibrium fits an interactionist interpretation of the role of metaphor in science. However, it seems the interaction is asymmetric, and the “balance of nature” metaphor has had a larger influence on mathematical equilibrium than vice versa. This disproportionate influence suggests that the metaphor was and continues to be a constitutive part of ecological theories. Key words: ecology, equilibrium, language, metaphor, science Introduction The “balance of nature” metaphor has influenced the development and continued practice of ecology. This metaphor has been used to invoke ideas such as a divinely determined stability, orderliness and predictability in natural systems. -

Urban Food Webs: Predators, Prey, and the People Who Feed Them
Urban Food Webs: Predators, Prey, and the People Who Feed Them A prevailing image of the city is of the steel and ships and energy flows through natural habitats, they concrete downtown skyline. The more common ex‑ have not been applied to urban ecosystems until re‑ perience of urban residents, however, is a place of cently (Faeth et al. 2005). irrigated and fertilized green spaces, such as yards, gardens, and parks, surrounding homes and business‑ At a symposium presented at the 2006 Ecological es where people commonly feed birds, squirrels, and Society of America meeting, 10 speakers assembled other wildlife. Within these highly human-modified to present and discuss “The Urban Food Web: How environments, researchers are becoming increasingly Humans Alter the State and Interactions of Trophic curious about how fundamental ecological phenom‑ Dynamics,” in a symposium organized by Paige War‑ ena play out, such as the feeding relationships among ren, Chris Tripler, Chris Lepczyk, and Jason Walker. species. While food webs have long provided a tool A key feature of urban environments, as described in for organizing information about feeding relation‑ the symposium, is that human influence may be en‑ Fig. 1. A generalized model of trophic dynamics in urban vs. non-urban terrestrial systems (modified from Faeth et al. 2005). Humans alter both systems, but in urban environments, human influences are more profound and include (a) enhancement of basal resources like water and fertilizer, and (b) direct control of plant species diversity and primary productivity, leading to strong bottom-up controls. Humans also (c) directly subsidize resources for herbivores and predators either through intentional feeding or unintended consequences of other activities (e.g., garbage, landscape plantings), leading to enhanced top-down control for some taxa and reduced top-down controls on others (see Fig. -

Predators: the Balance of Nature”
THE BALANCE OF NATURE PREDATORS Chewonki’s Balance of Nature presentation explores the adaptations and features of predators and looks at why predators are often feared and persecuted by people throughout the world. Using a slide show and various activities, we will examine the important function predators play in the natural world. We will discuss these animals’ crucial role in the food chain and identify predator-prey relationships in different habitats. Students will closely observe a few of Maine’s predators, including a mounted coyote, as well as several live non-releasable predatory animals from around the world. This program is designed for grades 3 and up and can compliment classes in biology, environmental issues or Maine studies, or be successfully integrated into any curriculum area, such as language arts, math, social studies or art. Equipment and Room Requirements • Classroom or multi-purpose room space is fine. • Students should sit at desks or in seats to easily view slides and displays. • Presentations can be done at a single location or in individual classrooms if 15 minutes is allowed between presentations. • The maximum group size is 30. • Teachers must be present in the room during the program. • Please have students wear name tags provided in packet. Note: Permits are required for most of the specimens (living and stuffed) that are used in Chewonki Traveling Natural History Programs and students are reminded of the legal limitations of private collections. All of our living animals are non-releasable because of injuries or were captive raised before arriving at Chewonki. No animals have been harmed or taken specifically for use in Chewonki programs. -

16 Biodiversity and the Balance of Nature
16 Biodiversity and the Balance of Nature S.L. Pimm 16.1 What Biodiversity Is Good for As we destroy biological diversity, what else are we doing to the environ ment, what is being changed, and how will those changes affect us? One part of the answers to these questions is provided by Lawton and Brown's consideration of redundancy (Chap. 12). Part of what the environment does for us involves "ecosystem services" - the movement of energy and nutrients through the air, water, and land, and through the food chains (Ehrlich, Foreword). Just how much biological diversity we need to keep the movement at approximately natural levels is a question of critical im portance. Nonetheless, it is not a question that is commonly asked. A major synthesis of theories on the dynamics of nutrient cycling (DeAngelis 1991) devotes little space to the consequences of changes in the numbers of species per trophic level: It is the number of trophic levels that receives the atten tion. One might well conclude that, over broad limits, ecosystem services will continue to be provided, so long as there are some plants, some animals, some decomposers, and so on. Lawton and Brown conclude that numerous species are redundant. One cannot be confident about this conclusion, for the evidence one way or another is still very limited. Even if it were correct, it would not provide a complete answer to the questions of the value of biological diversity. The conclusion only deals with the average movement of material; ecologists have long recognised that diversity may be important in determining the variability and persistence of ecological processes and their resistance to external changes. -

The Present Status of the Competitive Exclusion Principle
TREE vol. 1, no. I, July 7986 could be expected to rise periodically some other nuclear power stations 6 Bumazyan, A./. f1975)At. Energi. 39, (particularly during the spring snow are beinq built much nearer to these 167-172 melting) for many years. cities than the Chernobyl station to 7 Mednik, LG., Tikhomirov, F.A., It is very likely that the Soviet Kiev. The Chernobvl disaster will Prokhorov, V.M. and Karaban, P.T. (1981) Ekologiya, no. 1,4C-45 Union, after some initial reluctance, affect future plans, and will certainly 8 Molchanova, I.V., and Karavaeva, E.N. will eventually adopt the same atti- make a serious impact on the nuclear (1981) Ekologiya, no. 5,86-88 tude towards nuclear power stations generating strategy in many other 9 Molchanova, I.V., Karavaeva, E.N., as was adopted by the United States countries as well. Chebotina. M.Ya., and Kulikov, N.V. after the long public enquiry into the (1982) Ekologiya, no. 2.4-g accident at Three Mile Island in 1979. 10 Buyanov, N.I. (1981) Ekologiya, no. 3, As well as ending the propaganda of Acknowledgements 66-70 the almost absolute safety of nuclear The author is grateful to Geoffrey R. 11 Nifontova, M.G., and Kulikov, N.V. Banks for reading the manuscript and for power plants and labelling them as (1981) Ekologiya, no. 6,94-96 comments and editorial assistance. 12 Kulikov, N.V. 11981) Ekologiya, no. 4, ‘potentially dangerous’, the US gov- 5-11 ernment also recommended that 13 Vennikov, V.A. (1975) In new nuclear power plants be located References Methodological Aspects of Study of in areas remote from concentrations 1 Medvedev, Z.A. -
Soil Food Web: Implications to Soil Health
Soil Food Web: Implications to Soil Health Dr. Sajeemas “Mint” Pasakdee, Soil Scientist/Agronomist Advisor, Student Operated Organic Farm CIT-Jordan College of Agri. Sci. & Tech., Fresno State 1 Outline • Soil organisms and their interactions • What do soil organisms do? • Where do soil organisms live? • Food web structure • When are soil organisms active? • How is the food web measured? • Living soils—Bacteria; Fungi; Earthworms • Soil Environment 2 Organisms & Their Interaction 3 4 What do soil organisms do? Soil organisms support plant health as • decompose organic matter, • cycle nutrients, • enhance soil structure, • control the populations of soil organisms including crop pests. 5 Organic Matter • Food sources for soil organisms • Agricultural top soil ~1-6% (In CA, ~1-3% SOM) 6 Where do soil organisms live? • Around roots(rhizosphere) • Plant litter (C sources) • Humus (stabilized organic matter) • Surface of soil aggregates 7 Typical Food Web Structure • bacterial-dominated food webs o Grassland & Agri Soils o Ratio of fungi to bacteria, ~1:1 for productive agri. soils • fungal-dominated food webs o Ratio of fungal to bacterial, ~5:1 to 10:1 in a deciduous forest and 100:1 to 1000:1 in a coniferous forest 8 9 When are soil organisms active? 10 How is the food web measured? • Counting. Organism groups (bacteria, protozoa, arthropods, etc.); or subgroups (bacterial-feeding, fungal-feeding, and predatory nematodes), are counted and through calculations, can be converted to biomass. • Measuring activity levels. The amount of by-products, i.e., respiration (CO2); nitrification and decomposition rates • Measuring cellular constituents. Biomass carbon, nitrogen, or phosphorus; Enzymes; Phospholipids and other lipids; DNA and RNA 11 12 Soil Bacteria • One-celled organisms – generally 4/100,000 of an inch wide (1 µm) • A teaspoon of productive soil generally contains between 100 million and 1 billion bacteria (~two cows per acre). -

Invasive Species and Natural Function in Ecology
Invasive Species and Natural Function in Ecology Christopher Hunter Lean1 Abstract If ecological systems are functionally organised, they can possess functions or malfunctions. Natural function would provide justification for conservationists to act for the protection of current ecological arrangements and control the presence of populations that create ecosystem malfunctions. Invasive species are often thought to be malfunctional for ecosystems, so functional arrangement would provide an objective reason for their control. Unfortunately for this prospect, I argue no theory of function, which can support such normative conclusions, can be applied to large scale ecosystems. Instead ecological systems have causal structure, with small clusters of populations achieving functional arrangement. This, however, does not leave us without reason to control invasive species. We can look at the causal arrangement of ecological systems for populations that support ecological features that we should preserve. Populations that play a causal role in reducing biodiversity should be controlled, because biodiversity is a good all prudent agents should want to preserve. 1. Department of Philosophy, University of Sydney, A14 Quadrangle, 2006, Australia. For correspondence please send enquiries to [email protected]. 1 ‘Your heart has great value to your body. No one would argue that point. Does a mosquito population have similar value to a marsh?’ John Kricher, The Balance of Nature: Ecology’s Enduring Myth, p .19 1. Introduction There has been a persistent hope that populations in ecological systems have natural normativity, just as organs do in a body. Lungs, hearts, and kidneys have a relatively uncontroversial interpretation as possessing functions and malfunctions, these are normative in the sense that there is something they should be doing.