Volume 18 2018
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Angle Bisection with Straightedge and Compass
ANGLE BISECTION WITH STRAIGHTEDGE AND COMPASS The discussion below is largely based upon material and drawings from the following site : http://strader.cehd.tamu.edu/geometry/bisectangle1.0/bisectangle.html Angle Bisection Problem: To construct the angle bisector of an angle using an unmarked straightedge and collapsible compass . Given an angle to bisect ; for example , take ∠∠∠ ABC. To construct a point X in the interior of the angle such that the ray [BX bisects the angle . In other words , |∠∠∠ ABX| = |∠∠∠ XBC|. Step 1. Draw a circle that is centered at the vertex B of the angle . This circle can have a radius of any length, and it must intersect both sides of the angle . We shall call these intersection points P and Q. This provides a point on each line that is an equal distance from the vertex of the angle . Step 2. Draw two more circles . The first will be centered at P and will pass through Q, while the other will be centered at Q and pass through P. A basic continuity result in geometry implies that the two circles meet in a pair of points , one on each side of the line PQ (see the footnote at the end of this document). Take X to be the intersection point which is not on the same side of PQ as B. Equivalently , choose X so that X and B lie on opposite sides of PQ. Step 3. Draw a line through the vertex B and the constructed point X. We claim that the ray [BX will be the angle bisector . -
Build a Tetrahedral Kite
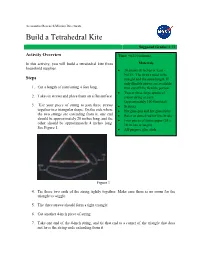
Aeronautics Research Mission Directorate Build a Tetrahedral Kite Suggested Grades: 8-12 Activity Overview Time: 90-120 minutes In this activity, you will build a tetrahedral kite from Materials household supplies. • 24 straws (8 inches or less) - NOTE: The straws need to be Steps straight and the same length. If only flexible straws are available, 1. Cut a length of yarn/string 4 feet long. then cut off the flexible portion. • Two or three large spools of 2. Take six straws and place them on a flat surface. cotton string or yarn (approximately 100 feet total) 3. Use your piece of string to join three straws • Scissors together in a triangular shape. On the side where • Hot glue gun and hot glue sticks the two strings are extending from it, one end • Ruler or dowel rod for kite bridle should be approximately 20 inches long, and the • Four pieces of tissue paper (24 x other should be approximately 4 inches long. 18 inches or larger) See Figure 1. • All-purpose glue stick Figure 1 4. Tie these two ends of the string tightly together. Make sure there is no room for the triangle to wiggle. 5. The three straws should form a tight triangle. 6. Cut another 4-inch piece of string. 7. Take one end of the 4-inch string, and tie that end to a corner of the triangle that does not have the string ends extending from it. Figure 2. 8. Add two more straws onto the longest piece of string. 9. Next, take the string that holds the two additional straws and tie it to the end of one of the 4-inch strings to make another tight triangle. -
Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem (For CBSE, ICSE, IAS, NET, NRA 2022)
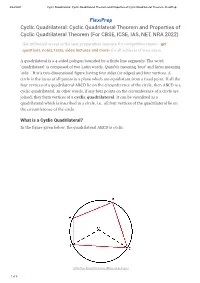
9/22/2021 Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem- FlexiPrep FlexiPrep Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem (For CBSE, ICSE, IAS, NET, NRA 2022) Get unlimited access to the best preparation resource for competitive exams : get questions, notes, tests, video lectures and more- for all subjects of your exam. A quadrilateral is a 4-sided polygon bounded by 4 finite line segments. The word ‘quadrilateral’ is composed of two Latin words, Quadric meaning ‘four’ and latus meaning ‘side’ . It is a two-dimensional figure having four sides (or edges) and four vertices. A circle is the locus of all points in a plane which are equidistant from a fixed point. If all the four vertices of a quadrilateral ABCD lie on the circumference of the circle, then ABCD is a cyclic quadrilateral. In other words, if any four points on the circumference of a circle are joined, they form vertices of a cyclic quadrilateral. It can be visualized as a quadrilateral which is inscribed in a circle, i.e.. all four vertices of the quadrilateral lie on the circumference of the circle. What is a Cyclic Quadrilateral? In the figure given below, the quadrilateral ABCD is cyclic. ©FlexiPrep. Report ©violations @https://tips.fbi.gov/ 1 of 5 9/22/2021 Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem- FlexiPrep Let us do an activity. Take a circle and choose any 4 points on the circumference of the circle. Join these points to form a quadrilateral. Now measure the angles formed at the vertices of the cyclic quadrilateral. -

13-6 Success for English Language Learners
LESSON Success for English Language Learners 13-6 The Law of Cosines Steps for Success Step I In order to create interest in the lesson opener, point out the following to students. • Trapeze, trapezium (a geometric figure as well as a bone in the wrist), trapezoid (also a geometric figure and a bone in the wrist), and trapezius (a muscle in the back) all come from the same root. They come from the Greek word trapeza, or “four-legged table.” Step II Teach the lesson. • Have students derive the remaining formulas in the Law of Cosines that were not derived in the text. • Technically speaking, a knot is not a nautical mile. A knot is a speed of one nautical mile per hour. • Heron’s Formula is also known as Hero’s Formula. A Heronian triangle is a triangle having rational side lengths and a rational area. Step III Ask English Language Learners to complete the worksheet for this lesson. • Point out that Example 1A in the student textbook is supported by Problem 1 on the worksheet. Remind students that, for example, side a is opposite angle A, not adjacent to it. • Point out that Example 3 in the student textbook is supported by Problem 2 on the worksheet. • Think and Discuss supports the problems on the worksheet. Making Connections • Students comfortableᎏᎏ with matrices may wish to verify the following equation: If ᭝ ϭ ͙s ͑ s Ϫ a ͒ ͑ s Ϫ b ͒ ͑ s Ϫ c ͒ is the area of the triangle under consideration, then 2 Ϫ1 11 a 2 2 2 2 Ϫ 2 ͑ 4 ͒ ϭ a b c 1 1 1 b . -

How Should the College Teach Analytic Geometry?*
1906.] THE TEACHING OF ANALYTIC GEOMETRY. 493 HOW SHOULD THE COLLEGE TEACH ANALYTIC GEOMETRY?* BY PROFESSOR HENRY S. WHITE. IN most American colleges, analytic geometry is an elective study. This fact, and the underlying causes of this fact, explain the lack of uniformity in content or method of teaching this subject in different institutions. Of many widely diver gent types of courses offered, a few are likely to survive, each because it is best fitted for some one purpose. It is here my purpose to advocate for the college of liberal arts a course that shall draw more largely from projective geometry than do most of our recent college text-books. This involves a restriction of the tendency, now quite prevalent, to devote much attention at the outset to miscellaneous graphs of purely statistical nature or of physical significance. As to the subject matter used in a first semester, one may formulate the question : Shall we teach in one semester a few facts about a wide variety of curves, or a wide variety of propositions about conies ? Of these alternatives the latter is to be preferred, for the educational value of a subject is found less in its extension than in its intension ; less in the multiplicity of its parts than in their unification through a few fundamental or climactic princi ples. Some teachers advocate the study of a wider variety of curves, either for the sake of correlation wTith physical sci ences, or in order to emphasize what they term the analytic method. As to the first, there is a very evident danger of dis sipating the student's energy ; while to the second it may be replied that there is no one general method which can be taught, but many particular and ingenious methods for special problems, whose resemblances may be understood only when the problems have been mastered. -

CC Geometry H
CC Geometry H Aim #8: How do we find perimeter and area of polygons in the Cartesian Plane? Do Now: Find the area of the triangle below using decomposition and then using the shoelace formula (also known as Green's theorem). 1) Given rectangle ABCD, a. Identify the vertices. b. Find the exact perimeter. c. Find the area using the area formula. d. List the vertices starting with A moving counterclockwise and apply the shoelace formula. Does the method work for quadrilaterals? 2) Calculate the area using the shoelace formula and then find the perimeter (nearest hundredth). 3) Find the perimeter (to the nearest hundredth) and the area of the quadrilateral with vertices A(-3,4), B(4,6), C(2,-3), and D(-4,-4). 4) A textbook has a picture of a triangle with vertices (3,6) and (5,2). Something happened in printing the book and the coordinates of the third vertex are listed as (-1, ). The answers in the back of the book give the area of the triangle as 6 square units. What is the y-coordinate of this missing vertex? 5) Find the area of the pentagon with vertices A(5,8), B(4,-3), C(-1,-2), D(-2,4), and E(2,6). 6) Show that the shoelace formula used on the trapezoid shown confirms the traditional formula for the area of a trapezoid: 1 (b1 + b2)h 2 D (x3,y) C (x2,y) A B (x ,0) (0,0) 1 7) Find the area and perimeter (exact and nearest hundredth) of the hexagon shown. -

ON a PROOF of the TREE CONJECTURE for TRIANGLE TILING BILLIARDS Olga Paris-Romaskevich
ON A PROOF OF THE TREE CONJECTURE FOR TRIANGLE TILING BILLIARDS Olga Paris-Romaskevich To cite this version: Olga Paris-Romaskevich. ON A PROOF OF THE TREE CONJECTURE FOR TRIANGLE TILING BILLIARDS. 2019. hal-02169195v1 HAL Id: hal-02169195 https://hal.archives-ouvertes.fr/hal-02169195v1 Preprint submitted on 30 Jun 2019 (v1), last revised 8 Oct 2019 (v3) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. ON A PROOF OF THE TREE CONJECTURE FOR TRIANGLE TILING BILLIARDS. OLGA PARIS-ROMASKEVICH To Manya and Katya, to the moments we shared around mathematics on one winter day in Moscow. Abstract. Tiling billiards model a movement of light in heterogeneous medium consisting of homogeneous cells in which the coefficient of refraction between two cells is equal to −1. The dynamics of such billiards depends strongly on the form of an underlying tiling. In this work we consider periodic tilings by triangles (and cyclic quadrilaterals), and define natural foliations associated to tiling billiards in these tilings. By studying these foliations we manage to prove the Tree Conjecture for triangle tiling billiards that was stated in the work by Baird-Smith, Davis, Fromm and Iyer, as well as its generalization that we call Density property. -

Greece Part 3
Greece Chapters 6 and 7: Archimedes and Apollonius SOME ANCIENT GREEK DISTINCTIONS Arithmetic Versus Logistic • Arithmetic referred to what we now call number theory –the study of properties of whole numbers, divisibility, primality, and such characteristics as perfect, amicable, abundant, and so forth. This use of the word lives on in the term higher arithmetic. • Logistic referred to what we now call arithmetic, that is, computation with whole numbers. Number Versus Magnitude • Numbers are discrete, cannot be broken down indefinitely because you eventually came to a “1.” In this sense, any two numbers are commensurable because they could both be measured with a 1, if nothing bigger worked. • Magnitudes are continuous, and can be broken down indefinitely. You can always bisect a line segment, for example. Thus two magnitudes didn’t necessarily have to be commensurable (although of course they could be.) Analysis Versus Synthesis • Synthesis refers to putting parts together to obtain a whole. • It is also used to describe the process of reasoning from the general to the particular, as in putting together axioms and theorems to prove a particular proposition. • Proofs of the kind Euclid wrote are referred to as synthetic. Analysis Versus Synthesis • Analysis refers to taking things apart to see how they work, or so you can understand them. • It is also used to describe reasoning from the particular to the general, as in studying a particular problem to come up with a solution. • This is one general meaning of analysis: a way of solving problems, of finding the answers. Analysis Versus Synthesis • A second meaning for analysis is specific to logic and theorem proving: beginning with what you wish to prove, and reasoning from that point in hopes you can arrive at the hypotheses, and then reversing the logical steps. -

Circle and Cyclic Quadrilaterals
Circle and Cyclic Quadrilaterals MARIUS GHERGU School of Mathematics and Statistics University College Dublin 33 Basic Facts About Circles A central angle is an angle whose vertex is at the center of ² the circle. It measure is equal the measure of the intercepted arc. An angle whose vertex lies on the circle and legs intersect the ² cirlc is called inscribed in the circle. Its measure equals half length of the subtended arc of the circle. AOC= contral angle, AOC ÙAC \ \ Æ ABC=inscribed angle, ABC ÙAC \ \ Æ 2 A line that has exactly one common point with a circle is ² called tangent to the circle. 44 The tangent at a point A on a circle of is perpendicular to ² the diameter passing through A. OA AB ? Through a point A outside of a circle, exactly two tangent ² lines can be drawn. The two tangent segments drawn from an exterior point to a cricle are equal. OA OB, OBC OAC 90o ¢OAB ¢OBC Æ \ Æ \ Æ Æ) ´ 55 The value of the angle between chord AB and the tangent ² line to the circle that passes through A equals half the length of the arc AB. AC,BC chords CP tangent Æ Æ ÙAC ÙAC ABC , ACP \ Æ 2 \ Æ 2 The line passing through the centres of two tangent circles ² also contains their tangent point. 66 Cyclic Quadrilaterals A convex quadrilateral is called cyclic if its vertices lie on a ² circle. A convex quadrilateral is cyclic if and only if one of the fol- ² lowing equivalent conditions hold: (1) The sum of two opposite angles is 180o; (2) One angle formed by two consecutive sides of the quadri- lateral equal the external angle formed by the other two sides of the quadrilateral; (3) The angle between one side and a diagonal equals the angle between the opposite side and the other diagonal. -

Cevians, Symmedians, and Excircles Cevian Cevian Triangle & Circle
10/5/2011 Cevians, Symmedians, and Excircles MA 341 – Topics in Geometry Lecture 16 Cevian A cevian is a line segment which joins a vertex of a triangle with a point on the opposite side (or its extension). B cevian C A D 05-Oct-2011 MA 341 001 2 Cevian Triangle & Circle • Pick P in the interior of ∆ABC • Draw cevians from each vertex through P to the opposite side • Gives set of three intersecting cevians AA’, BB’, and CC’ with respect to that point. • The triangle ∆A’B’C’ is known as the cevian triangle of ∆ABC with respect to P • Circumcircle of ∆A’B’C’ is known as the evian circle with respect to P. 05-Oct-2011 MA 341 001 3 1 10/5/2011 Cevian circle Cevian triangle 05-Oct-2011 MA 341 001 4 Cevians In ∆ABC examples of cevians are: medians – cevian point = G perpendicular bisectors – cevian point = O angle bisectors – cevian point = I (incenter) altitudes – cevian point = H Ceva’s Theorem deals with concurrence of any set of cevians. 05-Oct-2011 MA 341 001 5 Gergonne Point In ∆ABC find the incircle and points of tangency of incircle with sides of ∆ABC. Known as contact triangle 05-Oct-2011 MA 341 001 6 2 10/5/2011 Gergonne Point These cevians are concurrent! Why? Recall that AE=AF, BD=BF, and CD=CE Ge 05-Oct-2011 MA 341 001 7 Gergonne Point The point is called the Gergonne point, Ge. Ge 05-Oct-2011 MA 341 001 8 Gergonne Point Draw lines parallel to sides of contact triangle through Ge. -

Lesson 11: Perimeters and Areas of Polygonal Regions Defined by Systems of Inequalities
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 11 M4 GEOMETRY Lesson 11: Perimeters and Areas of Polygonal Regions Defined by Systems of Inequalities Student Outcomes . Students find the perimeter of a triangle or quadrilateral in the coordinate plane given a description by inequalities. Students find the area of a triangle or quadrilateral in the coordinate plane given a description by inequalities by employing Green’s theorem. Lesson Notes In previous lessons, students found the area of polygons in the plane using the “shoelace” method. In this lesson, we give a name to this method—Green’s theorem. Students will draw polygons described by a system of inequalities, find the perimeter of the polygon, and use Green’s theorem to find the area. Classwork Opening Exercises (5 minutes) The opening exercises are designed to review key concepts of graphing inequalities. The teacher should assign them independently and circulate to assess understanding. Opening Exercises Graph the following: a. b. Lesson 11: Perimeters and Areas of Polygonal Regions Defined by Systems of Inequalities 135 Date: 8/28/14 This work is licensed under a © 2014 Common Core, Inc. Some rights reserved. commoncore.org Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 11 M4 GEOMETRY d. c. Example 1 (10 minutes) Example 1 A parallelogram with base of length and height can be situated in the coordinate plane as shown. Verify that the shoelace formula gives the area of the parallelogram as . What is the area of a parallelogram? Base height . The distance from the -axis to the top left vertex is some number . -

Lesson 10: Perimeter and Area of Polygonal Regions in the Cartesian Plane
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 10 M4 GEOMETRY Lesson 10: Perimeter and Area of Polygonal Regions in the Cartesian Plane Student Outcomes . Students find the perimeter of a quadrilateral in the coordinate plane given its vertices and edges. Students find the area of a quadrilateral in the coordinate plane given its vertices and edges by employing Green’s theorem. Classwork Opening Exercise (5 minutes) Scaffolding: . Give students time to The Opening Exercise allows students to practice the shoelace method of finding the area struggle with these of a triangle in preparation for today’s lesson. Have students complete the exercise questions. Add more individually, and then compare their work with a neighbor’s. Pull the class back together questions as necessary to for a final check and discussion. scaffold for struggling If students are struggling with the shoelace method, they can use decomposition. students. Consider providing students with pre-graphed Opening Exercise quadrilaterals with axes on Find the area of the triangle given. Compare your answer and method to your neighbor’s, and grid lines. discuss differences. Go from concrete to abstract by starting with finding the area by decomposition, then translating one vertex to the origin, and then using the shoelace formula. Post the shoelace diagram and formula from Lesson 9. Shoelace Formula Decomposition Coordinates: 푨(−ퟑ, ퟐ), 푩(ퟐ, −ퟏ), 푪(ퟑ, ퟏ) Area of Rectangle: ퟔ units ⋅ ퟑ units = ퟏퟖ square Area Calculation: units ퟏ Area of Left Rectangle: ퟕ. ퟓ square units ((−ퟑ) ∙ (−ퟏ) + ퟐ ∙ ퟏ + ퟑ ∙ ퟐ − ퟐ ∙ ퟐ − (−ퟏ) ∙ ퟑ − ퟏ ∙ (−ퟑ)) ퟐ Area of Bottom Right Triangle: ퟏ square unit Area: ퟔ.