Lecture Notes on Submanifolds
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Math 327 Final Summary 20 February 2015 1. Manifold A
Math 327 Final Summary 20 February 2015 1. Manifold A subset M ⊂ Rn is Cr a manifold of dimension k if for any point p 2 M, there is an open set U ⊂ Rk and a Cr function φ : U ! Rn, such that (1) φ is injective and φ(U) ⊂ M is an open subset of M containing p; (2) φ−1 : φ(U) ! U is continuous; (3) D φ(x) has rank k for every x 2 U. Such a pair (U; φ) is called a chart of M. An atlas for M is a collection of charts f(Ui; φi)gi2I such that [ φi(Ui) = M i2I −1 (that is the images of φi cover M). (In some texts, like Spivak, the pair (φ(U); φ ) is called a chart or a coordinate system.) We shall mostly study C1 manifolds since they avoid any difficulty arising from the degree of differen- tiability. We shall also use the word smooth to mean C1. If we have an explicit atlas for a manifold then it becomes quite easy to deal with the manifold. Otherwise one can use the following theorem to find examples of manifolds. Theorem 1 (Regular value theorem). Let U ⊂ Rn be open and f : U ! Rk be a Cr function. Let a 2 Rk and −1 Ma = fx 2 U j f(x) = ag = f (a): The value a is called a regular value of f if f is a submersion on Ma; that is for any x 2 Ma, D f(x) has r rank k. -

A Level-Set Method for Convex Optimization with a 2 Feasible Solution Path
1 A LEVEL-SET METHOD FOR CONVEX OPTIMIZATION WITH A 2 FEASIBLE SOLUTION PATH 3 QIHANG LIN∗, SELVAPRABU NADARAJAHy , AND NEGAR SOHEILIz 4 Abstract. Large-scale constrained convex optimization problems arise in several application 5 domains. First-order methods are good candidates to tackle such problems due to their low iteration 6 complexity and memory requirement. The level-set framework extends the applicability of first-order 7 methods to tackle problems with complicated convex objectives and constraint sets. Current methods 8 based on this framework either rely on the solution of challenging subproblems or do not guarantee a 9 feasible solution, especially if the procedure is terminated before convergence. We develop a level-set 10 method that finds an -relative optimal and feasible solution to a constrained convex optimization 11 problem with a fairly general objective function and set of constraints, maintains a feasible solution 12 at each iteration, and only relies on calls to first-order oracles. We establish the iteration complexity 13 of our approach, also accounting for the smoothness and strong convexity of the objective function 14 and constraints when these properties hold. The dependence of our complexity on is similar to 15 the analogous dependence in the unconstrained setting, which is not known to be true for level-set 16 methods in the literature. Nevertheless, ensuring feasibility is not free. The iteration complexity of 17 our method depends on a condition number, while existing level-set methods that do not guarantee 18 feasibility can avoid such dependence. We numerically validate the usefulness of ensuring a feasible 19 solution path by comparing our approach with an existing level set method on a Neyman-Pearson classification problem.20 21 Key words. -

Full Text.Pdf
[version: January 7, 2014] Ann. Sc. Norm. Super. Pisa Cl. Sci. (5) vol. 12 (2013), no. 4, 863{902 DOI 10.2422/2036-2145.201107 006 Structure of level sets and Sard-type properties of Lipschitz maps Giovanni Alberti, Stefano Bianchini, Gianluca Crippa 2 d d−1 Abstract. We consider certain properties of maps of class C from R to R that are strictly related to Sard's theorem, and show that some of them can be extended to Lipschitz maps, while others still require some additional regularity. We also give examples showing that, in term of regularity, our results are optimal. Keywords: Lipschitz maps, level sets, critical set, Sard's theorem, weak Sard property, distri- butional divergence. MSC (2010): 26B35, 26B10, 26B05, 49Q15, 58C25. 1. Introduction In this paper we study three problems which are strictly interconnected and ultimately related to Sard's theorem: structure of the level sets of maps from d d−1 2 R to R , weak Sard property of functions from R to R, and locality of the divergence operator. Some of the questions we consider originated from a PDE problem studied in the companion paper [1]; they are however interesting in their own right, and this paper is in fact largely independent of [1]. d d−1 2 Structure of level sets. In case of maps f : R ! R of class C , Sard's theorem (see [17], [12, Chapter 3, Theorem 1.3])1 states that the set of critical values of f, namely the image according to f of the critical set S := x : rank(rf(x)) < d − 1 ; (1.1) has (Lebesgue) measure zero. -

Ricci Curvature and Minimal Submanifolds
Pacific Journal of Mathematics RICCI CURVATURE AND MINIMAL SUBMANIFOLDS Thomas Hasanis and Theodoros Vlachos Volume 197 No. 1 January 2001 PACIFIC JOURNAL OF MATHEMATICS Vol. 197, No. 1, 2001 RICCI CURVATURE AND MINIMAL SUBMANIFOLDS Thomas Hasanis and Theodoros Vlachos The aim of this paper is to find necessary conditions for a given complete Riemannian manifold to be realizable as a minimal submanifold of a unit sphere. 1. Introduction. The general question that served as the starting point for this paper was to find necessary conditions on those Riemannian metrics that arise as the induced metrics on minimal hypersurfaces or submanifolds of hyperspheres of a Euclidean space. There is an abundance of complete minimal hypersurfaces in the unit hy- persphere Sn+1. We recall some well known examples. Let Sm(r) = {x ∈ Rn+1, |x| = r},Sn−m(s) = {y ∈ Rn−m+1, |y| = s}, where r and s are posi- tive numbers with r2 + s2 = 1; then Sm(r) × Sn−m(s) = {(x, y) ∈ Rn+2, x ∈ Sm(r), y ∈ Sn−m(s)} is a hypersurface of the unit hypersphere in Rn+2. As is well known, this hypersurface has two distinct constant principal cur- vatures: One is s/r of multiplicity m, the other is −r/s of multiplicity n − m. This hypersurface is called a Clifford hypersurface. Moreover, it is minimal only in the case r = pm/n, s = p(n − m)/n and is called a Clifford minimal hypersurface. Otsuki [11] proved that if M n is a com- pact minimal hypersurface in Sn+1 with two distinct principal curvatures of multiplicity greater than 1, then M n is a Clifford minimal hypersur- face Sm(pm/n) × Sn−m(p(n − m)/n), 1 < m < n − 1. -

Isoparametric Hypersurfaces with Four Principal Curvatures Revisited
ISOPARAMETRIC HYPERSURFACES WITH FOUR PRINCIPAL CURVATURES REVISITED QUO-SHIN CHI Abstract. The classification of isoparametric hypersurfaces with four principal curvatures in spheres in [2] hinges on a crucial charac- terization, in terms of four sets of equations of the 2nd fundamental form tensors of a focal submanifold, of an isoparametric hypersur- face of the type constructed by Ferus, Karcher and Munzner.¨ The proof of the characterization in [2] is an extremely long calculation by exterior derivatives with remarkable cancellations, which is mo- tivated by the idea that an isoparametric hypersurface is defined by an over-determined system of partial differential equations. There- fore, exterior differentiating sufficiently many times should gather us enough information for the conclusion. In spite of its elemen- tary nature, the magnitude of the calculation and the surprisingly pleasant cancellations make it desirable to understand the under- lying geometric principles. In this paper, we give a conceptual, and considerably shorter, proof of the characterization based on Ozeki and Takeuchi's expan- sion formula for the Cartan-Munzner¨ polynomial. Along the way the geometric meaning of these four sets of equations also becomes clear. 1. Introduction In [2], isoparametric hypersurfaces with four principal curvatures and multiplicities (m1; m2); m2 ≥ 2m1 − 1; in spheres were classified to be exactly the isoparametric hypersurfaces of F KM-type constructed by Ferus Karcher and Munzner¨ [4]. The classification goes as follows. Let M+ be a focal submanifold of codimension m1 of an isoparametric hypersurface in a sphere, and let N be the normal bundle of M+ in the sphere. Suppose on the unit normal bundle UN of N there hold true 1991 Mathematics Subject Classification. -

Lecture Notes on Foliation Theory
INDIAN INSTITUTE OF TECHNOLOGY BOMBAY Department of Mathematics Seminar Lectures on Foliation Theory 1 : FALL 2008 Lecture 1 Basic requirements for this Seminar Series: Familiarity with the notion of differential manifold, submersion, vector bundles. 1 Some Examples Let us begin with some examples: m d m−d (1) Write R = R × R . As we know this is one of the several cartesian product m decomposition of R . Via the second projection, this can also be thought of as a ‘trivial m−d vector bundle’ of rank d over R . This also gives the trivial example of a codim. d- n d foliation of R , as a decomposition into d-dimensional leaves R × {y} as y varies over m−d R . (2) A little more generally, we may consider any two manifolds M, N and a submersion f : M → N. Here M can be written as a disjoint union of fibres of f each one is a submanifold of dimension equal to dim M − dim N = d. We say f is a submersion of M of codimension d. The manifold structure for the fibres comes from an atlas for M via the surjective form of implicit function theorem since dfp : TpM → Tf(p)N is surjective at every point of M. We would like to consider this description also as a codim d foliation. However, this is also too simple minded one and hence we would call them simple foliations. If the fibres of the submersion are connected as well, then we call it strictly simple. (3) Kronecker Foliation of a Torus Let us now consider something non trivial. -

Lecture 10: Tubular Neighborhood Theorem
LECTURE 10: TUBULAR NEIGHBORHOOD THEOREM 1. Generalized Inverse Function Theorem We will start with Theorem 1.1 (Generalized Inverse Function Theorem, compact version). Let f : M ! N be a smooth map that is one-to-one on a compact submanifold X of M. Moreover, suppose dfx : TxM ! Tf(x)N is a linear diffeomorphism for each x 2 X. Then f maps a neighborhood U of X in M diffeomorphically onto a neighborhood V of f(X) in N. Note that if we take X = fxg, i.e. a one-point set, then is the inverse function theorem we discussed in Lecture 2 and Lecture 6. According to that theorem, one can easily construct neighborhoods U of X and V of f(X) so that f is a local diffeomor- phism from U to V . To get a global diffeomorphism from a local diffeomorphism, we will need the following useful lemma: Lemma 1.2. Suppose f : M ! N is a local diffeomorphism near every x 2 M. If f is invertible, then f is a global diffeomorphism. Proof. We need to show f −1 is smooth. Fix any y = f(x). The smoothness of f −1 at y depends only on the behaviour of f −1 near y. Since f is a diffeomorphism from a −1 neighborhood of x onto a neighborhood of y, f is smooth at y. Proof of Generalized IFT, compact version. According to Lemma 1.2, it is enough to prove that f is one-to-one in a neighborhood of X. We may embed M into RK , and consider the \"-neighborhood" of X in M: X" = fx 2 M j d(x; X) < "g; where d(·; ·) is the Euclidean distance. -

Geometry Course Outline
GEOMETRY COURSE OUTLINE Content Area Formative Assessment # of Lessons Days G0 INTRO AND CONSTRUCTION 12 G-CO Congruence 12, 13 G1 BASIC DEFINITIONS AND RIGID MOTION Representing and 20 G-CO Congruence 1, 2, 3, 4, 5, 6, 7, 8 Combining Transformations Analyzing Congruency Proofs G2 GEOMETRIC RELATIONSHIPS AND PROPERTIES Evaluating Statements 15 G-CO Congruence 9, 10, 11 About Length and Area G-C Circles 3 Inscribing and Circumscribing Right Triangles G3 SIMILARITY Geometry Problems: 20 G-SRT Similarity, Right Triangles, and Trigonometry 1, 2, 3, Circles and Triangles 4, 5 Proofs of the Pythagorean Theorem M1 GEOMETRIC MODELING 1 Solving Geometry 7 G-MG Modeling with Geometry 1, 2, 3 Problems: Floodlights G4 COORDINATE GEOMETRY Finding Equations of 15 G-GPE Expressing Geometric Properties with Equations 4, 5, Parallel and 6, 7 Perpendicular Lines G5 CIRCLES AND CONICS Equations of Circles 1 15 G-C Circles 1, 2, 5 Equations of Circles 2 G-GPE Expressing Geometric Properties with Equations 1, 2 Sectors of Circles G6 GEOMETRIC MEASUREMENTS AND DIMENSIONS Evaluating Statements 15 G-GMD 1, 3, 4 About Enlargements (2D & 3D) 2D Representations of 3D Objects G7 TRIONOMETRIC RATIOS Calculating Volumes of 15 G-SRT Similarity, Right Triangles, and Trigonometry 6, 7, 8 Compound Objects M2 GEOMETRIC MODELING 2 Modeling: Rolling Cups 10 G-MG Modeling with Geometry 1, 2, 3 TOTAL: 144 HIGH SCHOOL OVERVIEW Algebra 1 Geometry Algebra 2 A0 Introduction G0 Introduction and A0 Introduction Construction A1 Modeling With Functions G1 Basic Definitions and Rigid -
Dimension Guide
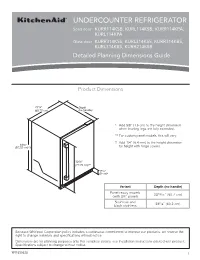
UNDERCOUNTER REFRIGERATOR Solid door KURR114KSB, KURL114KSB, KURR114KPA, KURL114KPA Glass door KURR314KSS, KURL314KSS, KURR314KBS, KURL314KBS, KURR214KSB Detailed Planning Dimensions Guide Product Dimensions 237/8” Depth (60.72 cm) (no handle) * Add 5/8” (1.6 cm) to the height dimension when leveling legs are fully extended. ** For custom panel models, this will vary. † Add 1/4” (6.4 mm) to the height dimension 343/8” (87.32 cm)*† for height with hinge covers. 305/8” (77.75 cm)** 39/16” (9 cm)* Variant Depth (no handle) Panel ready models 2313/16” (60.7 cm) (with 3/4” panel) Stainless and 235/8” (60.2 cm) black stainless Because Whirlpool Corporation policy includes a continuous commitment to improve our products, we reserve the right to change materials and specifications without notice. Dimensions are for planning purposes only. For complete details, see Installation Instructions packed with product. Specifications subject to change without notice. W11530525 1 Panel ready models Stainless and black Dimension Description (with 3/4” panel) stainless models A Width of door 233/4” (60.3 cm) 233/4” (60.3 cm) B Width of the grille 2313/16” (60.5 cm) 2313/16” (60.5 cm) C Height to top of handle ** 311/8” (78.85 cm) Width from side of refrigerator to 1 D handle – door open 90° ** 2 /3” (5.95 cm) E Depth without door 2111/16” (55.1 cm) 2111/16” (55.1 cm) F Depth with door 2313/16” (60.7 cm) 235/8” (60.2 cm) 7 G Depth with handle ** 26 /16” (67.15 cm) H Depth with door open 90° 4715/16” (121.8 cm) 4715/16” (121.8 cm) **For custom panel models, this will vary. -

Spectral Dimensions and Dimension Spectra of Quantum Spacetimes
PHYSICAL REVIEW D 102, 086003 (2020) Spectral dimensions and dimension spectra of quantum spacetimes † Michał Eckstein 1,2,* and Tomasz Trześniewski 3,2, 1Institute of Theoretical Physics and Astrophysics, National Quantum Information Centre, Faculty of Mathematics, Physics and Informatics, University of Gdańsk, ulica Wita Stwosza 57, 80-308 Gdańsk, Poland 2Copernicus Center for Interdisciplinary Studies, ulica Szczepańska 1/5, 31-011 Kraków, Poland 3Institute of Theoretical Physics, Jagiellonian University, ulica S. Łojasiewicza 11, 30-348 Kraków, Poland (Received 11 June 2020; accepted 3 September 2020; published 5 October 2020) Different approaches to quantum gravity generally predict that the dimension of spacetime at the fundamental level is not 4. The principal tool to measure how the dimension changes between the IR and UV scales of the theory is the spectral dimension. On the other hand, the noncommutative-geometric perspective suggests that quantum spacetimes ought to be characterized by a discrete complex set—the dimension spectrum. We show that these two notions complement each other and the dimension spectrum is very useful in unraveling the UV behavior of the spectral dimension. We perform an extended analysis highlighting the trouble spots and illustrate the general results with two concrete examples: the quantum sphere and the κ-Minkowski spacetime, for a few different Laplacians. In particular, we find that the spectral dimensions of the former exhibit log-periodic oscillations, the amplitude of which decays rapidly as the deformation parameter tends to the classical value. In contrast, no such oscillations occur for either of the three considered Laplacians on the κ-Minkowski spacetime. DOI: 10.1103/PhysRevD.102.086003 I. -
An Improved Level Set Algorithm Based on Prior Information for Left Ventricular MRI Segmentation
electronics Article An Improved Level Set Algorithm Based on Prior Information for Left Ventricular MRI Segmentation Lei Xu * , Yuhao Zhang , Haima Yang and Xuedian Zhang School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China; [email protected] (Y.Z.); [email protected] (H.Y.); [email protected] (X.Z.) * Correspondence: [email protected] Abstract: This paper proposes a new level set algorithm for left ventricular segmentation based on prior information. First, the improved U-Net network is used for coarse segmentation to obtain pixel-level prior position information. Then, the segmentation result is used as the initial contour of level set for fine segmentation. In the process of curve evolution, based on the shape of the left ventricle, we improve the energy function of the level set and add shape constraints to solve the “burr” and “sag” problems during curve evolution. The proposed algorithm was successfully evaluated on the MICCAI 2009: the mean dice score of the epicardium and endocardium are 92.95% and 94.43%. It is proved that the improved level set algorithm obtains better segmentation results than the original algorithm. Keywords: left ventricular segmentation; prior information; level set algorithm; shape constraints Citation: Xu, L.; Zhang, Y.; Yang, H.; Zhang, X. An Improved Level Set Algorithm Based on Prior 1. Introduction Information for Left Ventricular MRI Uremic cardiomyopathy is the most common complication also the cause of death with Segmentation. Electronics 2021, 10, chronic kidney disease and left ventricular hypertrophy is the most significant pathological 707. -

Two Classes of Slant Surfaces in Nearly Kahler Six Sphere
TWO CLASSES OF SLANT SURFACES IN NEARLY KAHLER¨ SIX SPHERE K. OBRENOVIC´ AND S. VUKMIROVIC´ Abstract. In this paper we find examples of slant surfaces in the nearly K¨ahler six sphere. First, we characterize two-dimensional small and great spheres which are slant. Their description is given in terms of the associative 3-form in Im O. Later on, we classify the slant surfaces of S6 which are orbits of maximal torus in G2. We show that these orbits are flat tori which are linearly S5 S6 1 π . full in ⊂ and that their slant angle is between arccos 3 and 2 Among them we find one parameter family of minimal orbits. 1. Introduction It is known that S2 and S6 are the only spheres that admit an almost complex structure. The best known Hermitian almost complex structure J on S6 is defined using octonionic multiplication. It not integrable, but satisfies condition ( X J)X = 0, for the Levi-Civita connection and every vector field X on S6. Therefore,∇ sphere S6 with this structure J is usually∇ referred as nearly K¨ahler six sphere. Submanifolds of nearly Kahler¨ sphere S6 are subject of intensive research. A. Gray [7] proved that almost complex submanifolds of nearly K¨ahler S6 are necessarily two-dimensional and minimal. In paper [3] Bryant showed that any Riemannian surface can be embedded in the six sphere as an almost complex submanifold. Almost complex surfaces were further investigated in paper [1] and classified into four types. Totally real submanifolds of S6 can be of dimension two or three.