1 Design of High-Performance Balanced Audio Interfaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Twisted-Pair Telephone Transmission Line
High Frequency Design From November 2002 High Frequency Electronics Copyright © 2002, Summit Technical Media, LLC TRANSMISSION LINES The Twisted-Pair Telephone Transmission Line By Richard LAO Sumida America Technologies elephone line is a This article reviews the prin- balanced twisted- ciples of operation and Tpair transmission measurement methods for line, and like any electro- twisted pair (balanced) magnetic transmission transmission lines common- line, its characteristic ly used for xDSL and ether- impedance Z0 can be cal- net computer networking culated from manufactur- ers’ data and measured on an instrument such as the Agilent 4395A (formerly Hewlett-Packard HP4395A) net- Figure 1. Lumped element model of a trans- work analyzer. For lowest bit-error-rate mission line. (BER), central office and customer premise equipment should have analog front-end cir- cuitry that matches the telephone line • Category 3: BWMAX <16 MHz. Intended for impedance. This article contains a brief math- older networks and telephone systems in ematical derivation and and a computer pro- which performance over frequency is not gram to generate a graph of characteristic especially important. Used for voice, digital impedance as a function of frequency. voice, older ethernet 10Base-T and commer- Twisted-pair line for telephone and LAN cial customer premise wiring. The market applications is typically fashioned from #24 currently favors CAT5 installations instead. AWG or #26 AWG stranded copper wire and • Category 4: BWMAX <20 MHz. Not much will be in one of several “categories.” The used. Similar to CAT5 with only one-fifth Electronic Industries Association (EIA) and the bandwidth. the Telecommunications Industry Association • Category 5: BWMAX <100 MHz. -

DM-TX-300N Digitalmedia™ CAT Transmitter 300N
DM-TX-300N DigitalMedia™ CAT Transmitter 300N > DigitalMedia™ CAT transmitter and multimedia interface > Built-in 3x1 AV switcher with front panel input selection and audio-breakaway[3] > QuickSwitch HD® technology achieves fast, reliable switching > DM® CAT output supports up to 450 ft (137 m) cable length[1] > Provides HDMI®, DVI, RGB, and multi-format analog video inputs > Also supports DisplayPort Multimode sources[4] > Includes balanced/unbalanced analog and S/PDIF audio inputs > Includes a local HDMI monitor output Multimedia Computer/AV Interface > Handles HD video with HDCP The DM-TX-300N provides versatile switching among three different video and audio sources. The inputs can be selected manually from the front > Handles Dolby Digital®, DTS®, and uncompressed 7.1 linear PCM audio panel or through a Crestron control system. Inputs include: > Detects and reports detailed video and audio input information • HDMI — Supports HD 1080p60 video and WUXGA computer signals > Performs automatic AV signal format management via EDID with HDCP and multi-channel lossless audio. Also handles DisplayPort > Provides a 10/100 Ethernet connection Multimode signals using an appropriate adapter or interface cable. > Enables device control via CEC, IR, RS-232, and Ethernet • DVI-I — This input handles DVI and analog RGB signals up to WUXGA > Allows quick, easy setup and diagnostics 1920x1200 pixels, as well as analog video up to 1080p60[2]. A stereo > Single-space 19-inch rack-mountable audio input is included to accommodate the analog audio signal from a > Includes external universal power pack balanced or unbalanced line-level source. • Video — This multi-format video input accepts analog YPbPr The DM-TX-300N is a DM® CAT transmitter and switcher that offers a component video signals up to 1080p60, as well as standard definition NTSC/PAL composite and S-Video. -

Baluns & Common Mode Chokes
Baluns & Common Mode Chokes Bill Leonard N0CU 5 August 2017 Topics – Part 1 • A Radio Frequency Interference (RFI) Problem • Some Basic Terms & Theory • Baluns & Chokes • What is a Balun • Types of Baluns • Balun Applications • Design & Performance Issues • Voltage Balun • Current Balun • What is a Common Mode Choke • How a Balun/Choke works Topics – Part 2 • Tripole • Risk of Installing a Balun • How to Reduce Common Mode currents • How to Build Current Baluns & Chokes • Transmission Line Transformers (TLT) • Examples of Current Chokes • Ferrite & Powdered Iron (Iron Powder) Suppliers Part 1 RFI Problem • Problem: • Audio started coming thru speakers of audio amp: • When transmitting > 50W SSB • 20M & 40m (I didn’t check any other bands) • No other electronics affected • Never had this problem before • Problem would come and go for no apparent reason RFI Problem – cont’d • Observations • Intermittent: problem was freq dependent • RF Power level dependent • Rotating the 20 M beam appeared to have no effect • No RFI with dummy load • AC line filter had no effect • Common Mode Choke on transmission line to house had no effect • Caps (180 pF) on speaker terminals on audio amp made problem worse • Caution: don’t use large caps (ie., 0.01 uF) with solid state amps => damage • Disconnecting 4 of 5 speakers from the audio amp eliminated problem • The two speakers with the longest cables were picking up RF • Both of these speakers needed to be connected to the amp to have the problem • Length of cable to each speaker ~30 ft (~1/4 wavelength on -

Transmission Lines — a Review and Explanation
ECE 145A/218A Course Notes: Transmission Lines — a review and explanation An apology 1. We must quickly learn some foundational material on transmission lines. It is described in the book and in much of the literature in a highly mathematical way. DON'T GET LOST IN THE MATH! We want to use the Smith chart to cut through the boring math — but must understand it first to know how to use the chart. 2. We are hoping to generate insight and interest — not pages of equations. Goals: 1.Recognize various transmission line structures. 2.Define reflection and transmission coefficients and calculate propagation of voltages and currents on ideal transmission lines. 3.Learn to use S parameters and the Smith chart to analyze circuits. 4.Learn to design impedance matching networks that employ both lumped and transmission line (distributed) elements. 5.Able to model (Agilent ADS) and measure (network analyzer) nonideal lumped components and transmission line networks at high frequencies What is a transmission line? ECE 145A/218A Course Notes Transmission Lines 1 Coaxial : SIG GND sig "unbalanced" Microstrip: GND Sig 1 Twin-lead: Sig 2 "balanced" Sig 1 Twisted-pair: Sig 2 Coplanar strips: Coplanar waveguide: ECE 145A/218A Course Notes Transmission Lines 1 Common features: • a pair of conductors • geometry doesn't change with distance. A guided wave will propagate on these lines. An unbalanced line is characterized by: 1. Has a signal conductor and ground 2. Ground is at zero potential relative to distant objects True unbalanced line: Coaxial line Nearly unbalanced: Coplanar waveguide, microstrip Balanced Lines: 1. -

Analysis and Performance of Antenna Baluns
Analysis and Performance of Antenna Baluns Lotter Kock Thesis presented in partial fulfilment of the requirements for the degree of Master of Science in Electronic Engineering at the University of Stellenbosch Study Leader: Prof. K.D. Palmer April2005 Stellenbosch University http://scholar.sun.ac.za - Declaration - "I, the undersigned, hereby declare that the work contained in this thesis is my own original work and that I have not previously in its entirety or in part submitted it at any university for a degree." Stellenbosch University http://scholar.sun.ac.za Abstract Data transmission plays a cardinal role in today's society. The key element of such a system is the antenna which is the interface between the air and the electronics. To operate optimally, many antennas require baluns as an interface between the electronics and the antenna. This thesis presents the problem definition, analysis and performance characterization of baluns. Examples of existing baluns are designed, computed and measured. A comparison is made between the analyzed baluns' results and recommendations are made. 2 Stellenbosch University http://scholar.sun.ac.za Opsomming Data transmissie is van kardinale belang in vandag se samelewing. Antennas is die voegvlak tussen die lug en die elektronika en vorm dus die basis van die sisteme. Vir baie antennas word 'n balun, wat die elektronika aan die antenna koppel, benodig om optimaal te funktioneer. Die tesis omskryf die probleemstelling, analiese en 'n prestasie maatstaf vir baluns. Prakties word daar gekyk na huidige baluns se ontwerp, simulasie, en metings. Die resultate word krities vergelyk en aanbevelings word gemaak. 3 Stellenbosch University http://scholar.sun.ac.za Acknowledgements First and foremost, I would like to thank God for affording me this life. -

PA881, PA884 & PA885 S/PDIF Digital Audio Baluns
PA881, PA884 & PA885 S/PDIF Digital Audio Baluns S/PDIF SIGNAL ETS ETS Receiving PA881 OR PA881 OR Equipment SOURCE PA884 PA884 utp Typical Use(s) Diagram Coax 75 ohm Features/Advantages Description Applications • Converts S/PDIP digital The ETS S/PDIF-compliant products convert digital • Broadcast Control Rooms audio between balanced audio signals from Unshielded Twisted Pair (UTP) 100 ohm UTP and cable to coax. Used for temporary setups, as well as • Recording Studios unbalanced 75 ohm in permanent locations where coax is already in place, BNC it’s less costly than pulling fresh UTP. The PA881 and • Post-Production Facilities PA884 baluns provide viable and dependable • Isolated signals ease solutions. • Healthcare Facilities routing signals via video patch bays, eliminating These baluns perform precise impedance- matching • Theaters ground loops and signal balancing, enabling S/PDIP signals to be transmitted with greater signal integrity and longer • Special Performance • Compact, rugged case runs over coaxial cable than can be achieved with Venues UTP wiring. • Made in USA Note: Consumers with digital equipment in the • 100% tested home such as CD players, DVD players, receivers, etc. with digital inputs/outputs should use PA881. PA884 is designed for professional applications. Specifications Product Ordering Information Bandwidth 20 kHz to 60 MHz (1dB) PA881 SPDIF Balun, RCA jack to RJ45 jack, pins 5, 4 Connectors FBNC or RCA jack to RJ45 jack PA881S SPDIF Balun, RCA plug to screw terminal Insertion Loss < 0.15 dB PA884 SPDIF Balun, FBNC to RJ45 jack, pins 5,4 Minimum Signal 0.50 V PA885 SPDIF Balun, RCA plug to RJ45, pins 1, 2 Impedance Match 75 ohm to 100 ohm Comm Mode Reject. -

Multi-Purpose Consoles Spirit Range Brochure
MULTI-PURPOSE CONSOLES FX16 16 Mono Channels with onboard Lexicon Effects FX8 8 Mono Channels with onboard Lexicon Effects SX SPIRIT RANGE 12 Mono & 4 Stereo Inputs BROCHURE M SERIES 4/8/12 Mono & 4 Stereo Inputs E SERIES 6 or 8 Mono & 4 Stereo Inputs NOTEPAD 4 Mono & 2 Stereo Inputs CONTENTS Quick Selector Compare Spirit Mixer Inputs & Features Quickly Features Table Page 4 Spirit Mixers at a glance 4 ? Power Features What makes Spirit consoles special Features in depth Pages 4 - 7 Power Features 4 - 7 FX16 16 Mono Channels with onboard Lexicon Effects Full Product Description Pages 8 & 9 The Mixers in detail 8 - 18 Dimensions Page 24 Specifications Page 25 FX8 8 Mono Channels with onboard Lexicon Effects Full Product Description Pages 10 & 11 Dimensions Page 24 Specifications Page 25 sx 12 Mono & 4 Stereo Inputs Full Product Description Pages 12 & 13 Dimensions Page 24 Specifications Page 25 M Series 4/8/12 Mono & 4 Stereo Inputs Full Product Description Pages 14 & 15 Dimensions Page 24 Specifications Page 25 E Series 6 or 8 Mono & 4 Stereo Inputs Full Product Description Pages 16 & 17 Dimensions Page 24 Specifications Page 25 Notepad 4 Mono & 2 Stereo Inputs Full Product Description Page 18 Dimensions Page 24 Specifications Page 25 Applications Using Spirit Mixers in Various Situations Introduction Page 19 Mic/Line Live Mixing Page 20 Insert Houses of Worship Page 21 Installed Sound Page 21 Mic/Line Mixer Applications 19 - 23 Submixing Page 22 Mic/Line Video Editing Page 22 Small/Home Studio Page 22 Dimensions & 24 - 25 Mic/Line Studio Recording Page 23 Specifications Mic/Line Frequently Asked 26 Other Soundcraft Products Questions How to find out more See Back Cover Glossary of 27 Technical Terms Other Soundcraft back cover products 2 WORLD CLASS MIXERS TEXAS When the Spirit range was first launched, mixing desks were either large and expensive, or small but ineffective. -

Light Beam Antenna Feed-Line Options
Light Beam Antenna Feed-line Options WB2LYL - Wayne A. Freiert This paper discusses three options that you have to connect your transceiver to your Light Beam Plus Antenna or Light Beam Antenna. The pros and cons of each option are also discussed. Also included is an explanation why feeding the antenna properly is important. Step-by-step Installation Instructions are also provided. The installation of any antenna and the performance of the antenna will vary from location to location. This variation is caused by differences in the ground conductivity, ground permitivity, the exact height of the antenna and the objects and topography near the antenna location. As a consequence, the Standing Wave Ratio (SWR) at the antenna feed-point will vary from one QTH to another. Also keep in mind that all Light Beam antennas are balanced antennas, similar to a ½ wave dipole. Most modern receivers, transmitters and transceivers are unbalanced. Therefore one must transition from balanced to unbalanced within the antenna system or the antenna performance will be adversely affected as well as radio frequency energy being carried into your shack on the outside of an unbalanced coaxial cable. To minimize SWR and the RF power loss that results, one either must alter the design of the antenna or utilize one of the following options. The Three Options Are: ♦ Balanced Feed-line Impedance Transformer: Using a ½ wavelength long Balanced Feed- line Transformer from the antenna, to a location below the antenna, to either a 1:1 Balun or a Coaxial Choke then using 50 Ohm Coaxial Cable to your transceiver. -
Audio Electrical Wiring Considerations Basic Branch Circuits in Homes And
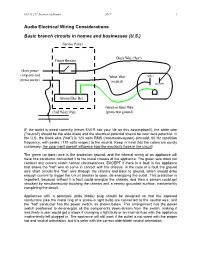
EELE 217 Science of Sound 2017 1 Audio Electrical Wiring Considerations Basic branch circuits in homes and businesses (U.S.) Service Panel Black Wire ("hot") Circuit Breaker (from power company and White Wire (wide) power meter) (neutral) (narrow) Ground Bus Bar Green or Bare Wire Cold Water Pipe (protection ground) IF the outlet is wired correctly (never EVER risk your life on this assumption!!), the white wire ("neutral") should be the wide blade and the electrical potential should be near zero potential. In the U.S. the black wire ("hot") is 120 volts RMS (root-mean-square) sinusoid, 60 Hz repetition frequency, with peaks ±170 volts respect to the neutral. Keep in mind that the colors are purely customary: the color itself doesn't influence how the electricity flows in the circuit! The green (or bare) wire is the protection ground, and the internal wiring of an appliance will have this conductor connected it to the metal chassis of the appliance. The green wire does not conduct any current under normal circumstances, EXCEPT if there is a fault in the appliance that allows the "hot" wire to come in contact with the chassis. In the case of a fault the ground wire short circuits the "hot" wire through the chassis and back to ground, which should draw enough current to trigger the circuit breaker to open, de-energizing the outlet. This protection is important, because without it a fault could energize the chassis, and then a person could get shocked by simultaneously touching the chassis and a nearby grounded surface, inadvertently completing the circuit. -

Electrical Characteristics of Transmission Lines
t Page 1 of 6 ELECTRICAL CHARACTERISTICS OF TRANSMISSION LINES Transmission lines are generally characterized by the following properties: balance-to-ground characteristic impedance attenuation per unit length velocity factor electrical length BALANCE TO GROUND Balance-to-ground is a measure of the electrical symmetry of a transmission line with respect to ground potential. A transmission line may be unbalanced or balanced. An unbalanced line has one of its two conductors at ground potential. A balanced transmission line has neither conductor at ground potential. An example of an unbalanced transmission line is coax. The outer shield of coax is grounded. An example of a balanced transmission line is two-wire line. Neither conductor is grounded and if the instantaneous RF voltage on one conductor is +V, it will be –V on the other conductor. Problems can result if an unbalanced transmission line is connected directly to a balanced line. A special transformer, known as a balun (balanced-to-unbalanced transformer) must be used. The schematic diagram of one type of balun is shown below. CHARACTERISTIC IMPEDANCE The two conductors comprising a transmission line have capacitance between them as well as inductance due to their length. This combination of series inductance and shunt capacitance gives a transmission line a property known as characteristic impedance. DISTRIBUTED CAPACITANCE, INDUCTANCE AND RESISTANCE IN A TWO WIRE TRANSMISSION LINE http://www.ycars.org/EFRA/Module%20C/TLChar.htm 1/26/2006 t Page 2 of 6 If the series inductance per unit length of line LS and the parallel capacitance per unit length CP are known, and the loss resistances can be neglected, one can calculate the characteristic impedance of a transmission line from the following equation: Examples: RG-62 coaxial cable has a series inductance of 117 nH per foot and a parallel capacitance of 13.5 pF per foot. -
Chapter 19 Table 19.1 Characteristics of Commonly Used Transmission Lines
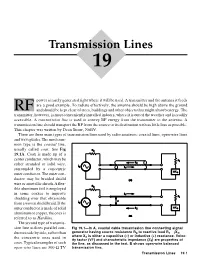
Transmission Lines 19 power is rarely generated right where it will be used. A transmitter and the antenna it feeds are a good example. To radiate effectively, the antenna should be high above the ground RF and should be kept clear of trees, buildings and other objects that might absorb energy. The transmitter, however, is most conveniently installed indoors, where it is out of the weather and is readily accessible. A transmission line is used to convey RF energy from the transmitter to the antenna. A transmission line should transport the RF from the source to its destination with as little loss as possible. This chapter was written by Dean Straw, N6BV. There are three main types of transmission lines used by radio amateurs: coaxial lines, open-wire lines and waveguides. The most com- mon type is the coaxial line, usually called coax. See Fig 19.1A. Coax is made up of a center conductor, which may be either stranded or solid wire, surrounded by a concentric outer conductor. The outer con- ductor may be braided shield wire or a metallic sheath. A flex- ible aluminum foil is employed in some coaxes to improve shielding over that obtainable from a woven shield braid. If the outer conductor is made of solid aluminum or copper, the coax is referred to as Hardline. The second type of transmis- sion line utilizes parallel con- Fig 19.1—In A, coaxial cable transmission line connecting signal ductors side by side, rather than generator having source resistance Rg to reactive load Ra ± jXa, the concentric ones used in where Xa is either a capacitive (–) or inductive (+) reactance. -

Video/Audio Transmission System Series VA700 (Formerly Series DVL4A)
Video/Audio Transmission System Series VA700 (formerly Series DVL4A) November 2000 1 VIDEO/AUDIO TRANSMISSION SYSTEM INSTRUCTION MANUAL SERIES VA700 & VA700M General The Series VA700 is a transmission system that converts video and audio signals (RS170, NTSC, PAL, SECAM) to fiber at the transmitter inter- face, and reconverts the signal to copper at the receiver. Connections Consult the diagrams for all pinouts. Indicators - Receiver The RED LED indicates that POWER is attached to the receiver and that the internal fuses and voltage regulators are working. The GREEN LED turns ON when sufficient optical power (light) is received by the module from the fiber optic transmitter for the fiber optic receiver to operate properly. If the GREEN LED is OFF, check that (1) the fiber optic transmitter is turned ON, and the fiber optic cable is plugged into the transmitter optical connector; (2) the fiber optic cable is plugged into the receiver optical connector; and (3) the RED LED is ON. 2 If the GREEN LED is still OFF, either (1) the fiber optic cable is broken, (2) there is too much optical attenuation in the fiber optic cable, or (3) either the transmitter or receiver fiber optic modules are defective. In this case, please call Radiant Communications. Indicators - Transmitter The RED LED turns ON when power is applied to the transmitter. This indicates that there is power supplied to the transmitter and that the internal fuses and regulators are functioning properly. Gain Control Can boost or lower video signal on RX module. Audio Connection For balanced audio, ground wire must be connected to center of “Audio In: and “Audio Out”.