Supplementary Material
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Penndot Fact Sheet
FACT SHEET Van/Mini-Van Titling and Registration Procedures PURPOSE This fact sheet explains the titling and registration procedures for van and mini-van type vehicles being titled and registered in Pennsylvania. DEFINITIONS Motor home: A motor vehicle designed or adapted for use as mobile dwelling or office; except a motor vehicle equipped with a truck-camper. Passenger Car: A motor vehicle, except a motorcycle, designed primarily for the transportation of persons and designed for carrying no more than 15 passengers including the driver and primarily used for the transportation of persons. The term includes motor vehicles which are designed with seats that may be readily removed and reinstalled, but does not include such vehicles if used primarily for the transportation of property. Truck: A motor vehicle designed primarily for the transportation of property. The term includes motor vehicles designed with seats that may be readily removed and reinstalled if those vehicles are primarily used for the transportation of property. GENERAL RULE Van and mini-van type vehicles are designed by vehicle manufacturers to be used in a multitude of different ways. Many vans are designed with seats for the transportation of persons much like a normal passenger car or station wagon; however, some are manufactured for use as a motor home, while others are designed simply for the transportation of property. Therefore, the proper type of registration plate depends on how the vehicle is to be primarily used. The following rules should help clarify the proper procedures required to title and register a van/mini-van: To register as a passenger car - The van/mini-van must be designed with seating for no more than 15 passengers including the driver, and used for non-commercial purposes. -
Page 1 Of.Tif
(Page 1 of 2) EO BEST State of California AIR RESOURCES BOARD EXECUTIVE ORDER A-10-154 . Relating to Certification of New Motor Vehicles FORD MOTOR COMPANY Pursuant to the authority vested in the Air Resources Board by Health and Safety Code Sections 43100, 43102, 43103, and 43835; and Pursuant to the authority vested in the undersigned by Health and Safety Code Sections 39515 and 39516 and Executive Orders G-45-3 and G-45-4; IT IS ORDERED AND RESOLVED: That Ford Motor Company exhaust emission control systems are certified as described below for 1979 model-year gasoline-powered passenger cars : Displacement Exhaust Emission Control Systems Engine Family Cubic Inches (Special Features 5. 8W "BV" 351 Exhaust Gas Recirculation, Air (2TT95x95) Injection, Three Way Catalyst Vehicle Models, Transmissions, Engine Codes and Evaporative Emission Control Families as listed on attachments. The following are the certification emission values to be listed on the window decal required by California Assembly-Line Test Procedures for 1979 model-year vehicles : Hydrocarbons Carbon Monoxide Nitrogen Oxides Engine Family Grams per Mile Grams per Mile Grams per Mile 5. 8W "BV" 0. 19 2.5 1.4 (2TT95x95) BE IT FURTHER RESOLVED: That the listed vehicle models also comply with "California Evaporative Emission Standards and Test Procedures for 1978 and Subsequent Model Gasoline-Powered Motor Vehicles except Motorcycles". BE IT FURTHER RESOLVED: That the listed vehicle models also comply with the Board's "Specifications for Fill Pipes and Openings of Motor Vehicle Fuel Tanks" (Title 13, California Administrative Code, Section 2290) for the aforementioned model year. -

The All-New BMW 3 Series Brochure
Sheer Driving Pleasure THE 3 08 2019 BMW India Pvt. Ltd. Printed in India 2019. Printed India Pvt. Ltd. 08 2019 BMW For more information, call 1800 102 2269. The models, equipment and possible vehicle configurations illustrated in this brochure may differ from vehicles supplied in the Indian market. For precise Sheer information, please contact your local Authorised BMW Dealer. Subject to change in design and equipment. © BMW India Pvt. Ltd., Gurugram, India. BMW 3 Series. BMW EFFICIENTDYNAMICS. Driving Pleasure Not to be reproduced wholly or in part without written permission of BMW India Pvt. Ltd., Gurugram, India. LESS EMISSIONS. MORE DRIVING PLEASURE. Job No. 2607 / BMW 3 Series (G20) Brochure (EN) / Size: 20W X 30H cm / Date 06-08-19 BMW Type Global Pro Light | Regular | Bold | Wingdings 3 (TT) Regular THE ALL-NEW BMW 3 SERIES. INNOVATION AND TECHNOLOGY. 17 Dynamics and Efficiency 19 Driver Assistance and Connectivity 20 Comfort and Functionality 18 Powertrain and Suspension EQUIPMENT. 21 Models and Lines 27 Equipment Highlights 34 Original BMW Accessories DISCOVER MORE. Scan the code to get more information, more driving pleasure on the all-new BMW 3 Series. 39 Exterior colours 40 Interior colours 41 Technical data Job No. 2607 / BMW 3 Series (G20) Brochure (EN) / Size: 20W X 30H cm / Date 06-08-19 BMW Type Global Pro Light | Regular | Bold | Wingdings 3 (TT) Regular THRILL SEEKER, TECH B U F F. P A C K E D INTO ONE. Job No. 2607 / BMW 3 Series (G20) Brochure (EN) / Size: 20W X 30H cm / Date 06-08-19 BMW Type Global Pro Light | Regular | Bold | Wingdings 3 (TT) Regular THE ONLY THING THAT KEEPS PACE IS YOUR EXCITEMENT. -
Installation Guide
Platform: DBALL/DBALL2 Firmware: GM10 v. 3.18+ Rev.: 20160118 Update Alert: Firmware updates are posted on the web on a regular basis. We recommend that you check for firmware and/or install guide updates prior to installing this product. Installation Guide Data override and door lock interface compatible with new generation GM vehicles with a BLADE-type key (i.e. Camaro, Equinox and Lacrosse). The available features include: Transponder override (no key required), door lock control, factory security control, trunk release, door, hood and trunk sensing, tach sensing, and much more. Refer to Quick Reference Guide (QRG) at the end of this guide for more information on how to use the various features offered with this product. Compatible with Plug&Play installation of optional T-Harness THGM610 (sold separately). Important: This guide is compatible with the GM10 firmware version 3.18 and higher. Index Vehicle Application Guide.................................................................................................................................................. 02 Installation (Wiring Diagrams & Vehicle Wiring Reference Charts) Type 1a (Without T-Harness)............................................................................................................................................ 03 Type 1b (With T-Harness Rev. 1)...................................................................................................................................... 04 Type 1c (With T-Harness Rev. 2)...................................................................................................................................... -
SKF Timing Belt Kits Technical Overview
Catalog 457702 2010 SKF Timing Belt Kits Technical overview In today’s modern automotive engines, there has been a quiet revolution. The need to run more auxiliary equipment such as water pumps or injection pumps, combined with efficiency demands and noise reduction, has caused new timing belt and tensioner systems to be developed. At first, tensioners were of a fixed nature, usually of metal design. They were simple to install: just set tension and tighten. Today, tensioners more likely include an internal spring or external damper, and non-metallic components are becoming more common. This illustration provides an overview of a modern timing belt and tensioner system. Engine-front wheel drive Belt Camshaft pulley tensioner unit Timing belt Injection pump pulley Water pump pulley Idler pulley Crankshaft The crankshaft drives the camshaft(s) and actuates the valves via a belt or a chain. Due to its advantages compared with those of a chain, namely reduced space, as well as lighter and quieter running, the timing belt is widely used by many car manufacturers. Belt tensioner unit (TBT) Idler pulley The belt tensioner unit sets the right tension and provides guidance for the belt. The idler pulley is fixed and allows the belt to be correctly wound around the driven component. The adjustment of tension during mounting is achieved by means of an eccentric Main designs currently used are shown here: or by means of a spring acting against a rear plate. The automatic belt tensioner unit, with its built-in spring and friction system, maintains a constant tension of the belt while the engine is running. -

Piston Rings
Piston Rings Specifications Listed Alphabetically by Vehicle Piston Rings Anillos de Piston Segments de Piston Qty & Width Cantdid y Ancho Quantite et largeur YEAR MODEL OR ENGINE Cyl. Dia. No. Cyl Set No. Comp. Rings Oil Segments ANO MODELO O MOTOR Diám. Cil. Nº. Cil Juego Nº. Anillos de Comp. Anillos de Aceite MILÉSIME MODELE OU MOTEUR Diam/ du Cyl Nº. Cyl Nº. de Jeu Segments de Comp. Segments Racieurs ARO-Romania 2500cc Eng. FWD 97.00mm 4 2C5628 8 - 2.5mm 4 - 5.0mm 3.819 ACURA 1986-89 1590cc Eng. D16A1 1.6 Litre 75.00mm 4 2C4640 4 - 1.2mm 4 - 2.8mm 2.953 4 - 1.5mm 1992-93 1678cc Eng. B17A1 1.7 Litre 81.00mm 4 2C4666 4 - 1.0mm 4 - 2.8mm 3.189 4 - 1.2mm 1990-01 1797cc Eng. B18C1 1.8 Litre 81.00mm 4 2C4666 4 - 1.0mm 4 - 2.8mm 1834cc Eng. B18A1, B18B1, B18C5 3.189 4 - 1.2mm 2002-06 1998cc Eng. K20A3, Civic, RSX 2.0 Litre 86.00mm 4 2C5089 8 - 1.2mm 4 - 2.0mm DOHC, i-VTEC 3.386 1998 2254cc Eng. F23A1 2.3 Litre 86.00mm 4 2C4969 8 - 1.2mm 4 - 2.8mm 3.386 2003-10 2354cc Eng. K24A2, DOHC 16V 2.4 Litre 87.00mm 4 2C5179 8 - 1.2mm 4 - 2.5mm i-VTECH 3.425 1991-98 2456cc Eng. G25A Vigor 2.5 Litre 85.00mm 5 2C4779 10 - 1.2mm 5 - 2.8mm 3.346 1986-87 2494cc Eng. C25A1 2.5 Litre 84.00mm 6 2C4644 12 - 1.2mm 6 - 4.0mm 3.307 1987-97 2675cc Eng. -

'18-'13 Af5220 Ca11450 A46297 49073 Ma10004
stockcode application CHAMP FRAM PERFORMAX PUROLATOR WIX MA10003 NISSAN ALTIMA 2.5L '18-'13 AF5220 CA11450 A46297 49073 MA10004 ACURA RDX '13-'18 AF5218 CA11413 A36276 49211 MA10005 HONDA ACCORD '17-'13 2.4L, ACURA TLX 2.4 '19-15 AF5222 CA11476 PA-600 A26282 49750 MA10006 HONDA ACCORD '17-'13 3.5L, ACURA TLX 3.5L '19-15 AF5223 CA11477 PA-601 A26283 49760 MA10007 HYUNDAI SANTA FE SPORT '19-'13 AF5224 CA11500 A36320 49670 MA10014 PRIUS, PRIUS C '19-'12 AF5216 CA11426 WA10000 MA10015 CHEVROLET MALIBU, IMPALA '19-'13 2.5L AF3174 CA11251 PA-603 A46279 WA10254 MA10016 CADILLAC XTS '17-'13; CHEVROLET IMPALA '19-'18 AF3176 WA10039 MA10017 DODGE DART '15-'13 AF5219 CA11431 A26281 A26281 WA10008 MA10018 INFINITI M35h '12, Q70 '18-14 MA10019 HONDA CR-V '14-'12 AF5210 CA11258 A36274 49630 MA10025 NISSAN VERSA 1.6L '19-'12 AF5207 CA11215 PA-598 A16202 49038 MA10175 VW JETTA 2.0L NAT. ASP. (CBPA) '17-'11 AF3611 CA9800 49013 MA10178 LAND ROVER LR4, RANGE ROVER 5.0L '18-'10 CA11062 49593 MA10181 CHEVROLET MALIBU 2.0L TURBO '15-'13 (BUICK REGAL) AF3174 CA11251 A46279 WA10253 MA10182 VOLKSWAGEN JETTA HYBRID '17-13, AUDI A3 1.4L '18 AF3619 A93619 WA10072 MA10183 AUDI RS5 '13 MA10184 LAND ROVER LR2, RANGE ROVER EVOQUE '17-'13 AF3615 CA11485 WA10007 MA10187 CHEVROLET SPARK '13 AF5221 CA11469 A26277 49264 CADILLAC ATS '18-'13 (2L, 2.5L, 3.6L) CHEVROLET CAMARO MA10188 '19-'16 AF3178 CA11494 A58153 49830 MA10190 BMW 2-,3-,4-SERIES 2.0L TURBO GAS '18-'12 CA11305 A93618 WA10005 MA10215 BUICK ENCORE '18-'13; CHEVROLET TRAX '19 AF3184 CA11501 A26319 WA10255 MA10216 -
Recommended Retail Price List – June 2020
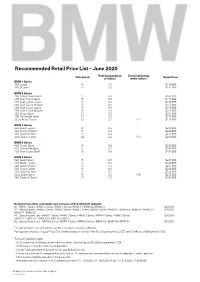
Recommended Retail Price List – June 2020 Fuel Consumption Electrical Energy VES (band) Retail Price (l/100km) (kWh/100km) BMW 1 Series 118i Luxury B 5.9 $139,888 118i M Sport B 5.9 $142,888 BMW 2 Series 216i Active Tourer Sport B 6.3 $141,888 216i Gran Tourer Sport B 6.5 $147,888 216i Gran Tourer Luxury B 6.5 $154,888 216i Gran Tourer M Sport B 6.5 $157,888 218i Gran Coupe Luxury B 5.9 $155,888 218i Gran Coupe M Sport B 5.9 $158,888 218i Coupe Sport C1 5.5 $161,888 218i Convertible Sport C1 5.8 $177,888 225xe Active Tourer B 2.4 17.4 $176,888 BMW 3 Series 320i Sedan Luxury B 6.3 $200,888 320i Sedan M Sport B 6.3 $206,888 330i Sedan M Sport B 6.4 $233,888 330e Sedan Luxury A2 2.2 15.4 $240,888 BMW 4 Series 420i Coupe Sport B 5.8 $200,888 420i Convertible Sport B 6.2 $242,888 420i Gran Coupe Sport B 5.8 $194,888 BMW 5 Series 520i Sedan Sport B 6.5 $237,888 520i Sedan Luxury B 6.5 $240,888 520i Sedan M Sport B 6.5 $251,888 530i Sedan Luxury B 6.5 $256,888 530i Sedan M Sport B 6.5 $274,888 530e Sedan Sport B 2.0 15.6 $272,888 540i Sedan M Sport C1 7.3 $345,888 Booking Fees (Non-refundable and inclusive of $10,000 COE deposit): A1. -

MY19 Corolla HB Ebrochure
2019 Corolla Hatchback Page 1 Ready. Set. Send it. The 2019 Toyota Corolla Hatchback keeps the fun going. Low to the ground and lightweight, this energetic hatch will reintroduce you to the thrill of driving. Its sporty exterior highlights the practical five-door design, while the interior surrounds you in comfort with plenty of room to take friends along for the ride. Corolla Hatchback is also up to speed with the latest standard tech like Apple CarPlay®8 compatibility and our state-of-the-art Toyota Safety Sense™ 2.0 (TSS 2.0)31 that helps provide peace of mind on every trip. So, whether you’re running to the store or driving to the lake, Corolla Hatchback finds fun around every corner. “Our designers went all out. They took our new platform and shaped one striking physique.” Left to right: XSE shown in Blue Flame with available accessory rear window spoiler and SE shown in Blizzard Pearl.46 See numbered footnotes in Disclosures section. Page 2 STYLING Fun at first sight. Corolla Hatchback has unforgettable charisma. Its sporty Hatchback design makes a lasting first impression and inspires you to go out and make more happen. Coming down the road, its polished available chrome grille surround reels in eyes while its distinctive rear spoiler acts as its signature sign-off. After you park, you’ll catch yourself looking over your shoulder, trying to steal one more glance before you walk away. 18-IN. ALLOY WHEELS CHROME TAILPIPE DIFFUSER LED HEADLIGHTS Available 18-in. alloy wheels add to the unique profile of It’s the little things that give Corolla Hatchback its sporty The fun doesn’t stop after the sun goes down. -

Vince Taliano
Cadillac & LaSalle Club Potomac Region Caddie Chronicle October 2016 DIRECTOR’S MESSAGE BY VINCE TALIANO 2016 OFFICERS: Special thanks to Larry Kolb REGIONAL DIRECTOR at Cars On Line for plugging NEWSLETTER EDITOR our Celebrating the 75th WEBSITE MANAGER VINCE TALIANO Anniversary of the 1941 ASSISTANT REGIONAL DIRECTOR Cadillac event in the CAR SHOW COORDINATOR SUMMER PICNIC HOST September 15th issue of their Collector Car Newsletter. View the DAN RUBY issue at http://www.cars-on-line.com/2016/sep-15.html. NATIONAL DIRECTOR NEWSLETTER COLUMNIST To help promote the event, this issue includes two great articles JACK MCCLOW SECRETARY on 1941 Cadilllacs. The first one was written by Richard Sills, who ASSOCIATE NEWSLETTER EDITOR shares his memories of the two 1941 Cadillacs that he once SANDY KEMPER owned. The second one was written by Vern Parker on Bill TREASURER HARRY SCOTT Thomas’ 1941 Cadillac that will be at our show. ACTIVITIES DIRECTOR NEWSLETTER COLUMNIST If you plan to attend the show, please send us your pre- R. SCOT MINESINGER registration form, especially if you are a 1941 Cadillac owner. The MEMBERSHIP DIRECTORS CENTRAL VA REGION LIAISONS ’41 owners who pre-register will receive a special certificate of NEWSLETTER COLUMNISTS appreciation for participating. Pre-registering saves owners $5 CHUCK & DEBBIE PIEL per car and saves the volunteers’ time on the day-of-the-show. OTHER KEY POSITIONS: AUTOMOBILIA AUCTIONEER Speaking of volunteers, they are needed to help with the show GEORGE BOXLEY NEWSLETTER COLUMNIST arrangements, including day-of-show tasks related to set-up, RITA BIAL-BOXLEY registration, parking, automobilia auction, tabulation, and clean- NEWSLETTER COLUMNIST up. -

2017 Buick Verano Owner Manual
2k17_Buick_Verano_84056201A.ai 1 5/18/2016 1:01:58 PM 2017 Verano C M Y CM MY CY CMY K Verano Owner’s Manual 84056201 A Buick Verano Owner Manual (GMNA- Localizing-U.S./Canada-10122753) - 2017 - crc - 5/16/16 Contents Introduction . 2 In Brief . 5 Keys, Doors, and Windows . 26 Seats and Restraints . 49 Storage . 94 Instruments and Controls . 97 Lighting . 133 Infotainment System . 139 Climate Controls . 171 Driving and Operating . 176 VehicleCare .................. 226 Service and Maintenance . 302 Technical Data ................ 316 Customer Information . 319 Reporting Safety Defects . 329 OnStar . 333 Index . 343 Buick Verano Owner Manual (GMNA- Localizing-U.S./Canada-10122753) - 2017 - crc - 5/16/16 2 Introduction Introduction This manual describes features that Helm, Incorporated may or may not be on the vehicle Attention: Customer Service because of optional equipment that 47911 Halyard Drive was not purchased on the vehicle, Plymouth, MI 48170 model variants, country USA specifications, features/applications that may not be available in your Using this Manual region, or changes subsequent to the printing of this owner manual. To quickly locate information about the vehicle, use the Index in the The names, logos, emblems, Refer to the purchase back of the manual. It is an slogans, vehicle model names, and documentation relating to your alphabetical list of what is in the vehicle body designs appearing in specific vehicle to confirm the manual and the page number where this manual including, but not limited features. it can be found. to, GM, the GM logo, BUICK, the BUICK Emblem, and VERANO are Keep this manual in the vehicle for trademarks and/or service marks of quick reference. -
Vehicle Theft Prevention Quick Reference Guide for the LAW ENFORCEMENT COMMUNITY FOREWORD
•2011• Vehicle Theft Prevention Quick Reference Guide FOR THE LAW ENFORCEMENT COMMUNITY FOREWORD The National Highway Traffic Safety Administration (NHTSA) is responsible for establishing and enforcing vehicle antitheft regulations. Motor vehicle theft is a growing problem that results in billions of dollars in losses every year. NHTSA has developed this annual guide to provide the law enforcement community with a concise reference tool to help identify passenger motor vehicles that have been exempted from the parts-marking requirements through model year 2011 and also to assist law enforcement in their prosecution and motor vehicle theft prevention efforts. This new guide provides a quick-reference, comprehensive summary of the vehicles that have been installed with antitheft devices as standard equipment, identifying which vehicles are exempted from the parts-marking requirements, the type of exemption granted (partial or full), and the production year(s) for which the exemption applies. This and future versions of the Vehicle Theft Prevention Quick Reference Guide for the Law Enforcement Community will provide comprehensive information for vehicle lines. The parts-marking requirements have been extended to include: • all passenger cars, • all multipurpose passenger vehicles with a gross vehicle weight rating of 6,000 pounds or less, • all light-duty trucks with a gross vehicle weight rating of 6,000 pounds or less determined to be high-theft, and • all low-theft, light-duty trucks with a gross vehicle weight rating of 6,000 pounds or less having a majority of their major parts interchangeable with those of a passenger motor vehicle line subject to the theft prevention standard.