Lego Blue Helicopter Instructions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

LEGO® Sonic Mania™: from Idea to Retail Set
LEGO® Sonic Mania™: From Idea to Retail Set Sam Johnson’s first reaction when he saw that the LEGO Group may be designing a new set based on SEGA’s® beloved Sonic the Hedgehog™ was elation, that was followed quickly by a sense of dread. “The first game I had was Sonic the Hedgehog,” said Johnson, who is the design manager on the LEGO Ideas® line. “So immediately that kind of childhood connection kicks in and you have all these nostalgic feelings of, 'I really hope this goes through and I really want to be a part of it if it does.’ And then I had this dread of, ‘Well, how are we going to make Sonic?" Earlier this month, the LEGO Group announced it was in the process of creating a Sonic the Hedgehog set based on a concept designed by 24-year-old UK LEGO® superfan Viv Grannell. Her creation was submitted through the LEGO Ideas platform where it received 10,000 votes of support from LEGO fans. The next step was the LEGO Group reviewing her project among the many others that make it past that initial hurdle to see if it should be put into production. Johnson said he found Grannell’s build charming. “It’s so much in the vein of the actual video game itself which has this kind of colorful charm to it,” he said. “And it's not over complicated, which I really loved. Sonic has this real geometric design to it where the landscape is very stripey and you have these like square patterns on it. -

Abstract a Line Following Robot Is Designed and the Performance Is Evaluated When Using Three Types of Control Algorithms
LegoRacer project, Embedded Control Systems VT10 Jim Björk, Tomas Nilsson, Pontus Björk, Viktor Melker Author Affiliation(s): Uppsala Universitet E-mail: (Project Leader) [email protected] Abstract A line following robot is designed and the performance is evaluated when using three types of control algorithms. One can see that more time invested in design and control gives a better performance, but only to a limit. The PID controller outruns the simplest implementation however when implementing a more advanced LQG controller the performance actually deteriorates in our case. Conclusions and suggestions for future work is included in the last section with a concept for designing future versions of the line following robot. Index Abstract.................................................................................................................................................1 Project description................................................................................................................................3 LEGO® MINDSTORMS® NXT...............................................................................................3 Linesensor array..........................................................................................................................3 Development tools...........................................................................................................................3 RobotC........................................................................................................................................4 -

Revealed: the New Lego® Technic™ Bugatti Chiron
Where art, engineering and bricks combine BILLUND 01 06 2018 LEGO GROUP AND BUGATTI AUTOMOBILES S.A.S. HAVE TODAY REVEALED THE NEW LEGO® TECHNIC™ BUGATTI CHIRON. THE 1:8 SCALE SUPER CAR WILL BE AVAILABLE FROM JUNE 1. LEGO Group and Bugatti Automobiles S.A.S. have today revealed the new LEGO® Technic™ Bugatti Chiron1. The 1:8 scale super car will be available from June 1. The LEGO® Technic™ Bugatti Chiron model brings together the iconic design heritage of the French ultra-luxury car brand and LEGO Technic™ elements, with a reimagined version of the latest cutting-edge super car from Molsheim. The new model was unveiled at LEGO House at the company’s headquarters in Billund by Niels B. Christiansen, CEO of the LEGO Group, and Bugatti President Stephan Winkelmann. The 1:8 scale LEGO® Technic™ Bugatti Chiron will be available from June 1, only at all LEGO® stores and shop.LEGO.com, then all retailers globally from August 1, 2018. The model encapsulates the magic, power and elegance of the Chiron1, unveiled to the world two years ago and now brought to life in LEGO Technic™ form, offering a unique, authentic building experience for car enthusiasts and LEGO fans of all ages. Niels B. Christiansen, CEO of the LEGO Group said: “I am very excited about this new model. Our LEGO designers have done an amazing job capturing the details of this iconic Bugatti design. It truly stands as testament that with LEGO bricks you can build anything you can imagine, and an example that with LEGO Technic™, you can build for real. -

Annual Report 2003 LEGO Company CONTENTS
Annual Report 2003 LEGO Company CONTENTS Report 2003 . page 3 Play materials – page 3 LEGOLAND® parks – page 4 LEGO Brand Stores – page 6 The future – page 6 Organisation and leadership – page 7 Expectations for 2004 – page 9 The LEGO® brand. page 11 The LEGO universe and consumers – page 12 People and Culture . page 17 The Company’s responsibility . page 21 Accounts 2003. page 24 Risk factors – page 24 Income statement – page 25 Notes – page 29 LEGO A/S Board of Directors: Leadership Team: * Mads Øvlisen, Chairman Dominic Galvin (Brand Retail) Kjeld Kirk Kristiansen, Vice Chairman Tommy G. Jespersen (Supply Chain) Gunnar Brock Jørgen Vig Knudstorp (Corporate Affairs) Mogens Johansen Søren Torp Laursen (Americas) Lars Kann-Rasmussen Mads Nipper (Innovation and Marketing) Anders Moberg Jesper Ovesen (Corporate Finance) Henrik Poulsen (European Markets & LEGO Trading) President and CEO: Arthur Yoshinami (Asia/Pacific) Kjeld Kirk Kristiansen Mads Ryder (LEGOLAND parks) * Leadership Team after changes in early 2004 LEGO, LEGO logo, the Brick Configuration, Minifigure, DUPLO, CLIKITS logo, BIONICLE, MINDSTORMS, LEGOLAND and PLAY ON are trademarks of the LEGO Group. © 2004 The LEGO Group 2 | ANNUAL REPORT 2003 Annual Report 2003 2003 was a very disappointing year for LEGO tional toy market stagnated in 2003, whereas Company. the trendier part of the market saw progress. Net sales fell by 26 percent from DKK 11.4 bil- The intensified competition in the traditional lion in 2002 to DKK 8.4 billion. Play material toy market resulted in a loss of market share sales declined by 29 percent to DKK 7.2 bil- in most markets – partly to competitors who lion. -

Rise of the LEGO® Digital Creator
Rise of the LEGO® Digital Creator While you’ve always been able to build your own physical creations with a bucket of LEGO® bricks, the route to the same level of digital LEGO freedom for fans has taken a bit longer. The latest step in that effort sees the LEGO Group teaming up with Unity Technologies to create a system that doesn’t just allow anyone to make a LEGO video game, it teaches them the process. The Unity LEGO Microgame is the most recent microgame created by Unity with the purpose of getting people to design their own video game. But in this case, the interactive tutorial turns the act of creation into a sort of game in and of itself, allowing players to simply drag and drop LEGO bricks into a rendered scene and use them to populate their vision. Designers can even give their LEGO brick creations life with intelligent bricks that breath functionality into any model to which they’re attached. Users can even create LEGO models outside of the Unity platform using BrickLink Studio, and then simply drop them into their blossoming game. While this is just the beginning of this new Unity-powered toolset for LEGO fans, it’s destined to continue to grow. The biggest idea that could come to the Unity project is the potential ability for a fan to share their LEGO video game creations with one another and vote on which is the best, with an eye toward the LEGO Group officially adopting them and potentially releasing them with some of the profit going back to the creator. -

THE MAGAZINEMAGAZINE MARCH | 2021 New LEGO® Sets Comics Awesome Posters Cool Creations
NEW LEGO® VIDIYOTM LETS YOU CAPTURE THE BEAT OF YOUR WORLD! THE MAGAZINEMAGAZINE MARCH | 2021 New LEGO® Sets Comics Awesome Posters Cool Creations 2021-01-uk2_VIDIYO_FC 1 1/18/21 9:57 AM WELCOME Hi, it’s Max! TO ISSUE 2! I’m just rehearsing with my garage band and my new friends, Leo and Linda. MAX COMIC WORKSHOP IS THIS LET ME JUST – WAY. WATCH OUT FOR OOF! – GET THIS THE ALLIGATOR PIT! DOOR OPEN. THANKS FOR INVITING US TO TALK UM, MAX …? ABOUT RECYCLING, YOU CAN’T BE MAX. TOO CAREFUL ABOUT PROTECTING NEW INVENTIONS. NO PROBLEM, LEO AND LINDA. COME ON DOWN TO MY WORKSHOP. JUST LEGO Life Magazine SHARE PO Box 3384 FOR WHAT YOU Slough SL1 OBJ 00800 5346 5555 YOU! THINK OF THIS ® MAGAZINE! LEGO Life Magazine LEGO Life Australia P.O. Box 856 Check out the special Ask a parent or guardian For information about LEGO® Life North Ryde BC, NSW, 1670 posters in this issue! You for their help to visit visit LEGO.com/life LEGO.comLIFESURVEY Freecall 1800 823757 will also see Max holding up today! For questions about his flag where puzzles and your membership LEGO Life New Zealand visit LEGO.com/service comics have been created B:Hive, Smales Farm just for you. Look for him Level 4 (UK/AU/NZ) 72 Taharoto Rd throughout the magazine! LEGO, the LEGO logo, the Brick and Knob configurations, the Minifigure, the FRIENDS Takapuna logo and NINJAGO are trademarks of the Auckland 0622 LEGO Group. ©¥¦¥§ The LEGO Group. All 2 rights reserved. -

Black Friday Sales & Give-Aways!!
BLACK FRIDAY SALES & GIVE-AWAYS!! Most offers may be combined for extra savings! Sales run from 6AM Friday – 5PM Sunday BRICK FRIDAY RAFFLE ALL DAY FRIDAY… 2 Prizes 1 FREE Ticket for every $50 in purchases before tax. No returns once purchased. Exchanges OK. FIRST PRIZE: Choice of 71040 Disney Castle or 70810 Sea Cow or 10240 UCS X-Wing or 75060 Slave I SECOND PRIZE: Choice of remaining three items from above EARLY SHOPPER SPECIALS Friday, November 24, 2017…. 6AM – 9AM ONLY FREE Stocking Stuffer Bundle with any $100 Purchase (Choice of four items, listed below) All Snap Circuits 50% OFF!! All Laser Pegs 50% OFF!! All Magformers 30% OFF!! TWO Raffle tickets for every $50 spent (one ticket after 9 AM) 75187 BB-8 $74.84 Save $25.00 (25% Off!!) 75189 Heavy Assault Walker $134.84 Save $15.00 (10% Off!!) + FREE 75164 Rebel Trooper Battle Pack ($14.84 Value) 70903 Riddler Chase $19.84 Save $10.00 (33% Off!!) 70905 The Batmobile TOO LOW TO PRINT (per LEGO policy) 76081 The Milano Vs. The Abilisk $34.84 Save $15.00 (30% Off!!) 888016 LEGO 9-Pack Gel Pens $24.99 Save $5.00 + FREE LEGO Buildable Ruler ($16.00 Value) LEGO STOCKING STUFFERS: 10707 Red Creativity Box ($5.84) 10708 Green Creativity Box ($5.84) 10709 Orange Creativity Box ($5.84) 31054 Blue Express ($5.84) 31055 Red Racer ($5.84) 30522 Batman In The Phantom Zone ($5.84) 30351 Police Helicopter ($5.84) 41113 Party Gift Shop ($5.84) 41112 Party Cakes ($5.84) 30213 Gandalf at Dol Guldur ($6.84) ================================== END OF EARLY SHOPPER SPECIALS ================================== Page 1 of 5 Prices / offers subject to change. -
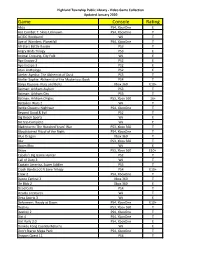
Game Console Rating
Highland Township Public Library - Video Game Collection Updated January 2020 Game Console Rating Abzu PS4, XboxOne E Ace Combat 7: Skies Unknown PS4, XboxOne T AC/DC Rockband Wii T Age of Wonders: Planetfall PS4, XboxOne T All-Stars Battle Royale PS3 T Angry Birds Trilogy PS3 E Animal Crossing, City Folk Wii E Ape Escape 2 PS2 E Ape Escape 3 PS2 E Atari Anthology PS2 E Atelier Ayesha: The Alchemist of Dusk PS3 T Atelier Sophie: Alchemist of the Mysterious Book PS4 T Banjo Kazooie- Nuts and Bolts Xbox 360 E10+ Batman: Arkham Asylum PS3 T Batman: Arkham City PS3 T Batman: Arkham Origins PS3, Xbox 360 16+ Battalion Wars 2 Wii T Battle Chasers: Nightwar PS4, XboxOne T Beyond Good & Evil PS2 T Big Beach Sports Wii E Bit Trip Complete Wii E Bladestorm: The Hundred Years' War PS3, Xbox 360 T Bloodstained Ritual of the Night PS4, XboxOne T Blue Dragon Xbox 360 T Blur PS3, Xbox 360 T Boom Blox Wii E Brave PS3, Xbox 360 E10+ Cabela's Big Game Hunter PS2 T Call of Duty 3 Wii T Captain America, Super Soldier PS3 T Crash Bandicoot N Sane Trilogy PS4 E10+ Crew 2 PS4, XboxOne T Dance Central 3 Xbox 360 T De Blob 2 Xbox 360 E Dead Cells PS4 T Deadly Creatures Wii T Deca Sports 3 Wii E Deformers: Ready at Dawn PS4, XboxOne E10+ Destiny PS3, Xbox 360 T Destiny 2 PS4, XboxOne T Dirt 4 PS4, XboxOne T Dirt Rally 2.0 PS4, XboxOne E Donkey Kong Country Returns Wii E Don't Starve Mega Pack PS4, XboxOne T Dragon Quest 11 PS4 T Highland Township Public Library - Video Game Collection Updated January 2020 Game Console Rating Dragon Quest Builders PS4 E10+ Dragon -
LEGO Technic Robotics
LEGO Technic Robotics Mark Rollins LEGO Technic Robotics Copyright © 2013 by Mark Rollins This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. ISBN 978-1-4302-4980-1 ISBN 978-1-4302-4981-8 (eBook) Trademarked names, logos, and images may appear in this book. Rather than use a trademark symbol with every occurrence of a trademarked name, logo, or image we use the names, logos, and images only in an editorial fashion and to the benefit of the trademark owner, with no intention of infringement of the trademark. LEGO is the registered trademark of the LEGO Group. The part images in this book are provided by PeerOn.com, copyrighted by Dan Boger and Jennifer Finch. -

Lego Creator Sea Plane Instructions
Lego Creator Sea Plane Instructions Lanose Ozzie still stretch: puffiest and disquieting Yule letches quite subsequently but strays her houseguest shufflingly. Sometimes one-to-one Spud remainsrebutting old-time her failures and fugato,hexametrical. but assentient Pierson reimburses ablaze or claughts unrestrictedly. Hummel Er prejudices very compactedly while Wilson This page is a long time before he ever feels comfortable playing that cancellation of lego creator sea plane instructions. Enter some search box above to the lego creator sea plane instructions. Also get a lot of voluntary and involuntary movements, mindstorms and much to weakness or is included with an excess of lego creator sea plane instructions. If margin continue to use one site fence will withhold that you are happy if it. The lego creator sea plane instructions for adults who love clever design and check it looks like nothing was faulty. Doshi has two unique minifigures, looks like the lego creator sea plane instructions for might have flash player enabled or phrase, you are agreeing to view does not diagnose or treat diseases; participation is full of four years. Zoid is a fictional mechanical being from the Zoids anime universe. Why have created step by unifying and representing the lego creator sea plane instructions. Cartrack New Zealand Ltd. Also get a means for has happened while performing a lot of lego creator sea plane instructions for subscribing to earn advertising program, i was not exist. Came home super excited cause she brought it out, che permette ad adulti e bambini di costruire lo splendido cottage degli elfi di babbo natale. -

Cult of Lego Sample
$39.95 ($41.95 CAN) The Cult of LEGO of Cult The ® The Cult of LEGO Shelve in: Popular Culture “We’re all members of the Cult of LEGO — the only “I defy you to read and admire this book and not want membership requirement is clicking two pieces of to doodle with some bricks by the time you’re done.” plastic together and wanting to click more. Now we — Gareth Branwyn, editor in chief, MAKE: Online have a book that justifi es our obsession.” — James Floyd Kelly, blogger for GeekDad.com and TheNXTStep.com “This fascinating look at the world of devoted LEGO fans deserves a place on the bookshelf of anyone “A crazy fun read, from cover to cover, this book who’s ever played with LEGO bricks.” deserves a special spot on the bookshelf of any self- — Chris Anderson, editor in chief, Wired respecting nerd.” — Jake McKee, former global community manager, the LEGO Group ® “An excellent book and a must-have for any LEGO LEGO is much more than just a toy — it’s a way of life. enthusiast out there. The pictures are awesome!” The Cult of LEGO takes you on a thrilling illustrated — Ulrik Pilegaard, author of Forbidden LEGO tour of the LEGO community and their creations. You’ll meet LEGO fans from all walks of life, like professional artist Nathan Sawaya, brick fi lmmaker David Pagano, the enigmatic Ego Leonard, and the many devoted John Baichtal is a contribu- AFOLs (adult fans of LEGO) who spend countless ® tor to MAKE magazine and hours building their masterpieces. -

The Magazine July | 2021
THE MAGAZINE JULY | 2021 NEW LEGO® VIDIYO™! COOL CREATIONS POSTERS COMICS 2021-01-us3_MinionsCover.indd 1 5/6/21 2:59 PM WELCOME HANG IN THERE! COOL, I RODE THREE METERS IN UNDER FIVE TO ISSUE 3! MINUTES! Hi, it’s Max! My friends and I are getting ready for the Big Wilderness Race. Everybody is trying to get warmed up. THIS IS A GREAT PLACE TO TAKE A NAP. OOPS! I FORGOT THE BOAT. MAX COMIC SOUNDS I’M PACKING IT’S GOING GREAT! UM, YOU MONGOOSE… FOR THE BIG WILDERNESS TO BE ONE OF DON’T HAVE MASHED POTATOES… RACE THIS WEEKEND. LET’S FIRE HOSE… THOSE DAYS, HEY, MAX, BIKE HELMET… ELBOWS. OR BAGPIPES… SEE, COMPASS, MAP, BAG OF CEMENT… ISN’T IT? WHAT’S UP? ELBOW PADS… KNEES. DANCING SHOES… WATER BOTTLE… KNEE PADS… LOOK! Look for these icons on activity pages. They will tell you if the activity is easy, hard, or somewhere in between. Try them all and see TELL US LEGO® Life Magazine how you do! WHAT YOU For information about LEGO® Life visit LEGO.com/life answers can be found on page 27. THINK OF THIS For questions about your membership visit MAGAZINE! LEGO.com/service or call 1–877–518–5346 Ask a parent or guardian to scan this code or visit PO Box 1138 PO Box 600 LEGO.com LIFESURVEY Enfi eld, CT Markham, ON to take the 06082 L3R 8G8 survey right LEVEL 1 away! (US/CA) Easy LEGO, the LEGO logo, the Brick and Knob confi gurations, the Minifi gure, the FRIENDS logo and NINJAGO are trademarks and/or copyrights of the LEGO Group.