Open Source and Free Software
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

University of California, San Diego
UNIVERSITY OF CALIFORNIA, SAN DIEGO Computational Methods for Parameter Estimation in Nonlinear Models A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Physics with a Specialization in Computational Physics by Bryan Andrew Toth Committee in charge: Professor Henry D. I. Abarbanel, Chair Professor Philip Gill Professor Julius Kuti Professor Gabriel Silva Professor Frank Wuerthwein 2011 Copyright Bryan Andrew Toth, 2011 All rights reserved. The dissertation of Bryan Andrew Toth is approved, and it is acceptable in quality and form for publication on microfilm and electronically: Chair University of California, San Diego 2011 iii DEDICATION To my grandparents, August and Virginia Toth and Willem and Jane Keur, who helped put me on a lifelong path of learning. iv EPIGRAPH An Expert: One who knows more and more about less and less, until eventually he knows everything about nothing. |Source Unknown v TABLE OF CONTENTS Signature Page . iii Dedication . iv Epigraph . v Table of Contents . vi List of Figures . ix List of Tables . x Acknowledgements . xi Vita and Publications . xii Abstract of the Dissertation . xiii Chapter 1 Introduction . 1 1.1 Dynamical Systems . 1 1.1.1 Linear and Nonlinear Dynamics . 2 1.1.2 Chaos . 4 1.1.3 Synchronization . 6 1.2 Parameter Estimation . 8 1.2.1 Kalman Filters . 8 1.2.2 Variational Methods . 9 1.2.3 Parameter Estimation in Nonlinear Systems . 9 1.3 Dissertation Preview . 10 Chapter 2 Dynamical State and Parameter Estimation . 11 2.1 Introduction . 11 2.2 DSPE Overview . 11 2.3 Formulation . 12 2.3.1 Least Squares Minimization . -

How to Use Your Favorite MIP Solver: Modeling, Solving, Cannibalizing
How to use your favorite MIP Solver: modeling, solving, cannibalizing Andrea Lodi University of Bologna, Italy [email protected] January-February, 2012 @ Universit¨atWien A. Lodi, How to use your favorite MIP Solver Setting • We consider a general Mixed Integer Program in the form: T maxfc x : Ax ≤ b; x ≥ 0; xj 2 Z; 8j 2 Ig (1) where matrix A does not have a special structure. A. Lodi, How to use your favorite MIP Solver 1 Setting • We consider a general Mixed Integer Program in the form: T maxfc x : Ax ≤ b; x ≥ 0; xj 2 Z; 8j 2 Ig (1) where matrix A does not have a special structure. • Thus, the problem is solved through branch-and-bound and the bounds are computed by iteratively solving the LP relaxations through a general-purpose LP solver. A. Lodi, How to use your favorite MIP Solver 1 Setting • We consider a general Mixed Integer Program in the form: T maxfc x : Ax ≤ b; x ≥ 0; xj 2 Z; 8j 2 Ig (1) where matrix A does not have a special structure. • Thus, the problem is solved through branch-and-bound and the bounds are computed by iteratively solving the LP relaxations through a general-purpose LP solver. • The course basically covers the MIP but we will try to discuss when possible how crucial is the LP component (the engine), and how much the whole framework is built on top the capability of effectively solving LPs. • Roughly speaking, using the LP computation as a tool, MIP solvers integrate the branch-and-bound and the cutting plane algorithms through variations of the general branch-and-cut scheme [Padberg & Rinaldi 1987] developed in the context of the Traveling Salesman Problem (TSP). -

Nonlinear Integer Programming ∗
Nonlinear Integer Programming ∗ Raymond Hemmecke, Matthias Koppe,¨ Jon Lee and Robert Weismantel Abstract. Research efforts of the past fifty years have led to a development of linear integer programming as a mature discipline of mathematical optimization. Such a level of maturity has not been reached when one considers nonlinear systems subject to integrality requirements for the variables. This chapter is dedicated to this topic. The primary goal is a study of a simple version of general nonlinear integer problems, where all constraints are still linear. Our focus is on the computational complexity of the problem, which varies significantly with the type of nonlinear objective function in combination with the underlying combinatorial structure. Nu- merous boundary cases of complexity emerge, which sometimes surprisingly lead even to polynomial time algorithms. We also cover recent successful approaches for more general classes of problems. Though no positive theoretical efficiency results are available, nor are they likely to ever be available, these seem to be the currently most successful and interesting approaches for solving practical problems. It is our belief that the study of algorithms motivated by theoretical considera- tions and those motivated by our desire to solve practical instances should and do inform one another. So it is with this viewpoint that we present the subject, and it is in this direction that we hope to spark further research. Raymond Hemmecke Otto-von-Guericke-Universitat¨ Magdeburg, FMA/IMO, Universitatsplatz¨ 2, 39106 Magdeburg, Germany, e-mail: [email protected] Matthias Koppe¨ University of California, Davis, Dept. of Mathematics, One Shields Avenue, Davis, CA, 95616, USA, e-mail: [email protected] Jon Lee IBM T.J. -

Functional Description of MINTO, a Mixed Integer Optimizer
Functional description of MINTO, a mixed integer optimizer Citation for published version (APA): Savelsbergh, M. W. P., Sigismondi, G. C., & Nemhauser, G. L. (1991). Functional description of MINTO, a mixed integer optimizer. (1st version ed.) (Memorandum COSOR; Vol. 9117). Technische Universiteit Eindhoven. Document status and date: Published: 01/01/1991 Document Version: Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal. -

Process Optimization
Process Optimization Mathematical Programming and Optimization of Multi-Plant Operations and Process Design Ralph W. Pike Director, Minerals Processing Research Institute Horton Professor of Chemical Engineering Louisiana State University Department of Chemical Engineering, Lamar University, April, 10, 2007 Process Optimization • Typical Industrial Problems • Mathematical Programming Software • Mathematical Basis for Optimization • Lagrange Multipliers and the Simplex Algorithm • Generalized Reduced Gradient Algorithm • On-Line Optimization • Mixed Integer Programming and the Branch and Bound Algorithm • Chemical Production Complex Optimization New Results • Using one computer language to write and run a program in another language • Cumulative probability distribution instead of an optimal point using Monte Carlo simulation for a multi-criteria, mixed integer nonlinear programming problem • Global optimization Design vs. Operations • Optimal Design −Uses flowsheet simulators and SQP – Heuristics for a design, a superstructure, an optimal design • Optimal Operations – On-line optimization – Plant optimal scheduling – Corporate supply chain optimization Plant Problem Size Contact Alkylation Ethylene 3,200 TPD 15,000 BPD 200 million lb/yr Units 14 76 ~200 Streams 35 110 ~4,000 Constraints Equality 761 1,579 ~400,000 Inequality 28 50 ~10,000 Variables Measured 43 125 ~300 Unmeasured 732 1,509 ~10,000 Parameters 11 64 ~100 Optimization Programming Languages • GAMS - General Algebraic Modeling System • LINDO - Widely used in business applications -

A Tutorial on Linear and Bilinear Matrix Inequalities
Journal of Process Control 10 (2000) 363±385 www.elsevier.com/locate/jprocont Review A tutorial on linear and bilinear matrix inequalities Jeremy G. VanAntwerp, Richard D. Braatz* Large Scale Systems Research Laboratory, Department of Chemical Engineering, University of Illinois at Urbana-Champaign, 600 South Mathews Avenue, Box C-3, Urbana, Illinois 61801-3792, USA Abstract This is a tutorial on the mathematical theory and process control applications of linear matrix inequalities (LMIs) and bilinear matrix inequalities (BMIs). Many convex inequalities common in process control applications are shown to be LMIs. Proofs are included to familiarize the reader with the mathematics of LMIs and BMIs. LMIs and BMIs are applied to several important process control applications including control structure selection, robust controller analysis and design, and optimal design of experiments. Software for solving LMI and BMI problems is reviewed. # 2000 Published by Elsevier Science Ltd. All rights reserved. 1. Introduction One of the main reasons for this is that process control engineers are generally unfamiliar with the mathematics A linear matrix inequality (LMI) is a convex con- of LMI/BMIs, and there is no introductory text avail- straint. Consequently, optimization problems with con- able to aid the control engineer in learning these vex objective functions and LMI constraints are mathematics. As of the writing of this paper, the only solvable relatively eciently with o-the-shelf software. text that covers LMIs in any depth is the research The form of an LMI is very general. Linear inequalities, monograph of Boyd and co-workers [22]. Although this convex quadratic inequalities, matrix norm inequalities, monograph is a useful roadmap for locating LMI and various constraints from control theory such as results scattered throughout the electrical engineering Lyapunov and Riccati inequalities can all be written as literature, it is not a textbook for teaching the concepts LMIs. -

Neos & Htcondor: Optimizing Your World
Optimizing Your neos & World neos: Network-Enabled Optimization System Mathematical Formulation Maximize ∑j∈Vbjyj−α∗∑(i,j)∈Adijxij Subject to exiting node on tour ∑(i,j)∈Axij−yi=0,∀i∈V Subject to entering node on tour ∑(i,j)∈Axij−yi=0,∀j∈V AMPL Model set V; set LINKS := {i in V, j in V: i <> j}; param alpha >= 0; param d{LINKS} >= 0; param b{V} >= 0; #default benefit of visiting a bar neos param c{V} >= 0; # default cost of one drink param B default 30; # default maximum budget for drinks http://www.neos-guide.org/content/bar-crawl-optimization neos & HTCondor neos Workflow Optimization Job Solver Categories bco lp sdp neos co milp sio Results cp minco slp go miocp socp Browser Web kestrel nco uco lno ndo Solver Names AlphaECP csdp LOQO PGAPack ASA ddsip LRAMBO proxy BARON DICOPT MILES PSwarm BDMLP Domino MINLP QSopt_EX Email Email BiqMac DSDP MINOS RELAX4 BLMVM feaspump MINTO SBB Solver Pool bnbs FilMINT MOSEK scip at UW-Madison Bonmin filter MUSCOD-II SD bpmpd filterMPEC NLPEC SDPA Cbc Gurobi NMTR SDPLR Clp icos nsips SDPT3 concorde Ipopt OOQP SeDuMi Custom CONDOR KNITRO PATH SNOPT CONOPT LANCELOT PATHNLP SYMPHONY Couenne L-BFGS-B PENBMI TRON XMLRPC CPLEX LINDOGlobal PENSDP XpressMP Off-Site Solvers Argonne National Lab Solver Inputs Arizona State University AMPL jpg OSIL SPARSE Kestrel C LP RELAX4 SPARSE_SDPA (AMPL or GAMS) University of Klagenfurt CPLEX MATLAB_BINARY SDPA TSP University of Minho Fortran MOSEL SDPLR ZIMPL GAMS MPS SMPS Jobs Per Month 140000 120000 100000 80000 Minho 60000 Klagenfurt Arizona State 40000 Argonne 20000 -

Click to Edit Master Title Style
Click to edit Master title style MINLP with Combined Interior Point and Active Set Methods Jose L. Mojica Adam D. Lewis John D. Hedengren Brigham Young University INFORM 2013, Minneapolis, MN Presentation Overview NLP Benchmarking Hock-Schittkowski Dynamic optimization Biological models Combining Interior Point and Active Set MINLP Benchmarking MacMINLP MINLP Model Predictive Control Chiller Thermal Energy Storage Unmanned Aerial Systems Future Developments Oct 9, 2013 APMonitor.com APOPT.com Brigham Young University Overview of Benchmark Testing NLP Benchmark Testing 1 1 2 3 3 min J (x, y,u) APOPT , BPOPT , IPOPT , SNOPT , MINOS x Problem characteristics: s.t. 0 f , x, y,u t Hock Schittkowski, Dynamic Opt, SBML 0 g(x, y,u) Nonlinear Programming (NLP) Differential Algebraic Equations (DAEs) 0 h(x, y,u) n m APMonitor Modeling Language x, y u MINLP Benchmark Testing min J (x, y,u, z) 1 1 2 APOPT , BPOPT , BONMIN x s.t. 0 f , x, y,u, z Problem characteristics: t MacMINLP, Industrial Test Set 0 g(x, y,u, z) Mixed Integer Nonlinear Programming (MINLP) 0 h(x, y,u, z) Mixed Integer Differential Algebraic Equations (MIDAEs) x, y n u m z m APMonitor & AMPL Modeling Language 1–APS, LLC 2–EPL, 3–SBS, Inc. Oct 9, 2013 APMonitor.com APOPT.com Brigham Young University NLP Benchmark – Summary (494) 100 90 80 APOPT+BPOPT APOPT 70 1.0 BPOPT 1.0 60 IPOPT 3.10 IPOPT 50 2.3 SNOPT Percentage (%) 6.1 40 Benchmark Results MINOS 494 Problems 5.5 30 20 10 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Not worse than 2 times slower than -

Specifying “Logical” Conditions in AMPL Optimization Models
Specifying “Logical” Conditions in AMPL Optimization Models Robert Fourer AMPL Optimization www.ampl.com — 773-336-AMPL INFORMS Annual Meeting Phoenix, Arizona — 14-17 October 2012 Session SA15, Software Demonstrations Robert Fourer, Logical Conditions in AMPL INFORMS Annual Meeting — 14-17 Oct 2012 — Session SA15, Software Demonstrations 1 New and Forthcoming Developments in the AMPL Modeling Language and System Optimization modelers are often stymied by the complications of converting problem logic into algebraic constraints suitable for solvers. The AMPL modeling language thus allows various logical conditions to be described directly. Additionally a new interface to the ILOG CP solver handles logic in a natural way not requiring conventional transformations. Robert Fourer, Logical Conditions in AMPL INFORMS Annual Meeting — 14-17 Oct 2012 — Session SA15, Software Demonstrations 2 AMPL News Free AMPL book chapters AMPL for Courses Extended function library Extended support for “logical” conditions AMPL driver for CPLEX Opt Studio “Concert” C++ interface Support for ILOG CP constraint programming solver Support for “logical” constraints in CPLEX INFORMS Impact Prize to . Originators of AIMMS, AMPL, GAMS, LINDO, MPL Awards presented Sunday 8:30-9:45, Conv Ctr West 101 Doors close 8:45! Robert Fourer, Logical Conditions in AMPL INFORMS Annual Meeting — 14-17 Oct 2012 — Session SA15, Software Demonstrations 3 AMPL Book Chapters now free for download www.ampl.com/BOOK/download.html Bound copies remain available purchase from usual -

Domain Reduction Techniques for Global NLP and MINLP Optimization 2
Domain reduction techniques for global NLP and MINLP optimization Y. Puranik1 and Nikolaos V. Sahinidis1 1Department of Chemical Engineering, Carnegie Mellon University, Pittsburgh, PA 15213, USA Abstract Optimization solvers routinely utilize presolve techniques, including model simplification, reformulation and domain reduction techniques. Domain reduction techniques are especially important in speeding up convergence to the global optimum for challenging nonconvex nonlinear programming (NLP) and mixed- integer nonlinear programming (MINLP) optimization problems. In this work, we survey the various techniques used for domain reduction of NLP and MINLP optimization problems. We also present a computational analysis of the impact of these techniques on the performance of various widely available global solvers on a collection of 1740 test problems. Keywords: Constraint propagation; feasibility-based bounds tightening; optimality-based bounds tightening; domain reduction 1 Introduction combinatorial complexity introduced by the integer variables, nonconvexities in objective function or We consider the following mixed-integer nonlinear the feasible region lead to multiple local minima programming problem (MINLP): and provide a challenge to the optimization of such problems. min f(~x) Branch-and-bound [138] based methods can be s.t. g(~~x) ≤ 0 exploited to solve Problem 1 to global optimal- (1) ~xl ≤ ~x ≤ ~xu ity. Inspired by branch-and-bound for discrete Rn−m Zm ~x ∈ × programming problems [109], branch-and-bound was arXiv:1706.08601v1 [cs.DS] 26 Jun 2017 adapted for continuous problems by Falk and MINLP is a very general representation for opti- Soland [58]. The algorithm proceeds by bounding mization problems and includes linear programming the global optimum by a valid lower and upper (LP), mixed-integer linear programming (MIP) and bound throughout the search process. -
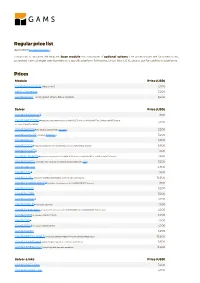
Standard Price List
Regular price list April 2021 (Download PDF ) This price list includes the required base module and a number of optional solvers. The prices shown are for unrestricted, perpetual named single user licenses on a specific platform (Windows, Linux, Mac OS X), please ask for additional platforms. Prices Module Price (USD) GAMS/Base Module (required) 3,200 MIRO Connector 3,200 GAMS/Secure - encrypted Work Files Option 3,200 Solver Price (USD) GAMS/ALPHAECP 1 1,600 GAMS/ANTIGONE 1 (requires the presence of a GAMS/CPLEX and a GAMS/SNOPT or GAMS/CONOPT license, 3,200 includes GAMS/GLOMIQO) GAMS/BARON 1 (for details please follow this link ) 3,200 GAMS/CONOPT (includes CONOPT 4 ) 3,200 GAMS/CPLEX 9,600 GAMS/DECIS 1 (requires presence of a GAMS/CPLEX or a GAMS/MINOS license) 9,600 GAMS/DICOPT 1 1,600 GAMS/GLOMIQO 1 (requires presence of a GAMS/CPLEX and a GAMS/SNOPT or GAMS/CONOPT license) 1,600 GAMS/IPOPTH (includes HSL-routines, for details please follow this link ) 3,200 GAMS/KNITRO 4,800 GAMS/LGO 2 1,600 GAMS/LINDO (includes GAMS/LINDOGLOBAL with no size restrictions) 12,800 GAMS/LINDOGLOBAL 2 (requires the presence of a GAMS/CONOPT license) 1,600 GAMS/MINOS 3,200 GAMS/MOSEK 3,200 GAMS/MPSGE 1 3,200 GAMS/MSNLP 1 (includes LSGRG2) 1,600 GAMS/ODHeuristic (requires the presence of a GAMS/CPLEX or a GAMS/CPLEX-link license) 3,200 GAMS/PATH (includes GAMS/PATHNLP) 3,200 GAMS/SBB 1 1,600 GAMS/SCIP 1 (includes GAMS/SOPLEX) 3,200 GAMS/SNOPT 3,200 GAMS/XPRESS-MINLP (includes GAMS/XPRESS-MIP and GAMS/XPRESS-NLP) 12,800 GAMS/XPRESS-MIP (everything but general nonlinear equations) 9,600 GAMS/XPRESS-NLP (everything but discrete variables) 6,400 Solver-Links Price (USD) GAMS/CPLEX Link 3,200 GAMS/GUROBI Link 3,200 Solver-Links Price (USD) GAMS/MOSEK Link 1,600 GAMS/XPRESS Link 3,200 General information The GAMS Base Module includes the GAMS Language Compiler, GAMS-APIs, and many utilities . -
Notes 1: Introduction to Optimization Models
Notes 1: Introduction to Optimization Models IND E 599 September 29, 2010 IND E 599 Notes 1 Slide 1 Course Objectives I Survey of optimization models and formulations, with focus on modeling, not on algorithms I Include a variety of applications, such as, industrial, mechanical, civil and electrical engineering, financial optimization models, health care systems, environmental ecology, and forestry I Include many types of optimization models, such as, linear programming, integer programming, quadratic assignment problem, nonlinear convex problems and black-box models I Include many common formulations, such as, facility location, vehicle routing, job shop scheduling, flow shop scheduling, production scheduling (min make span, min max lateness), knapsack/multi-knapsack, traveling salesman, capacitated assignment problem, set covering/packing, network flow, shortest path, and max flow. IND E 599 Notes 1 Slide 2 Tentative Topics Each topic is an introduction to what could be a complete course: 1. basic linear models (LP) with sensitivity analysis 2. integer models (IP), such as the assignment problem, knapsack problem and the traveling salesman problem 3. mixed integer formulations 4. quadratic assignment problems 5. include uncertainty with chance-constraints, stochastic programming scenario-based formulations, and robust optimization 6. multi-objective formulations 7. nonlinear formulations, as often found in engineering design 8. brief introduction to constraint logic programming 9. brief introduction to dynamic programming IND E 599 Notes 1 Slide 3 Computer Software I Catalyst Tools (https://catalyst.uw.edu/) I AIMMS - optimization software (http://www.aimms.com/) Ming Fang - AIMMS software consultant IND E 599 Notes 1 Slide 4 What is Mathematical Programming? Mathematical programming refers to \programming" as a \planning" activity: as in I linear programming (LP) I integer programming (IP) I mixed integer linear programming (MILP) I non-linear programming (NLP) \Optimization" is becoming more common, e.g.