> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK 1 HERE TO EDIT) <
Dynamics of the oil-air Interface in hard disk drive bearings.
F. HENDRIKS, Member, IEEE, B.S. TILLEY, J. BILLINGHAM, P.J. DELLAR, R. HINCH
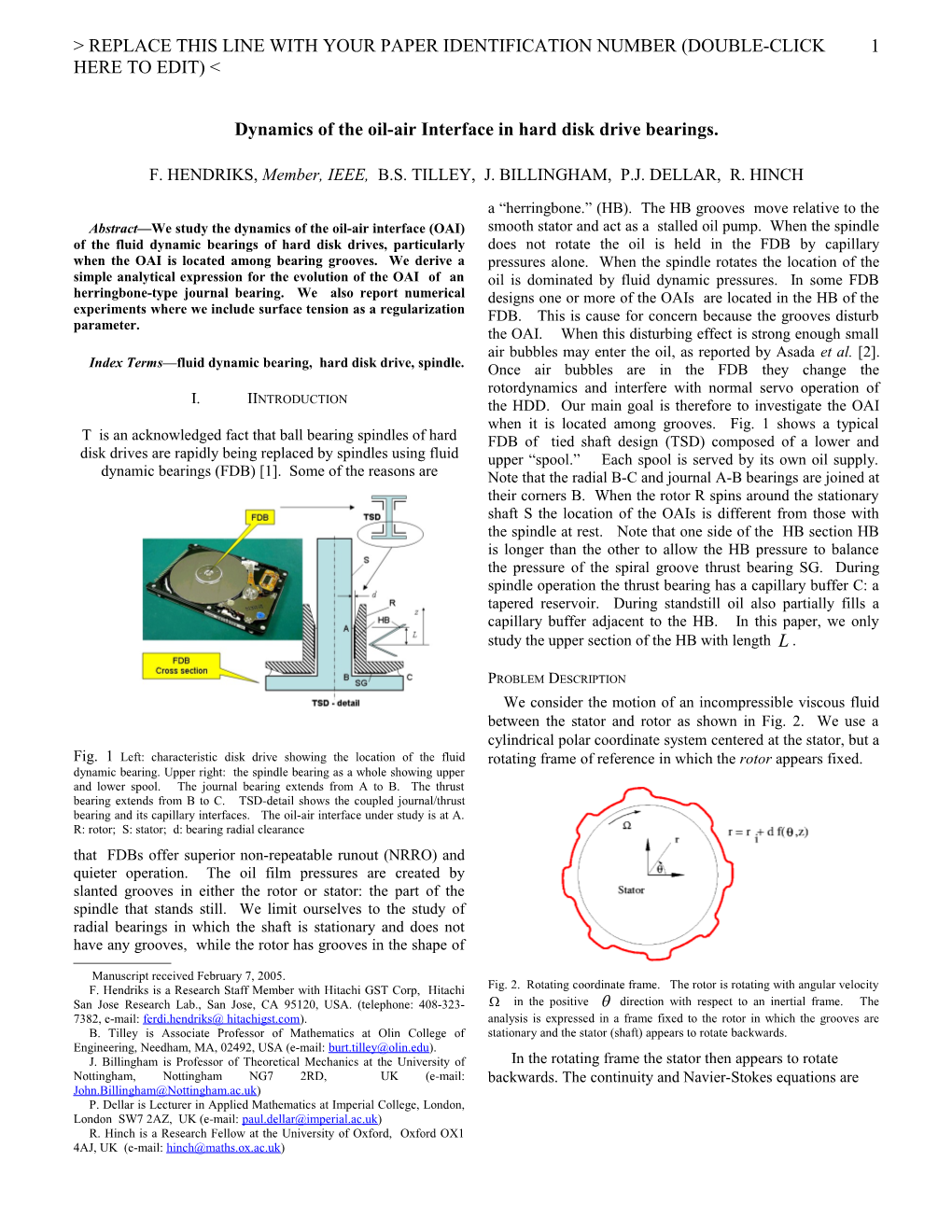
a “herringbone.” (HB). The HB grooves move relative to the Abstract—We study the dynamics of the oil-air interface (OAI) smooth stator and act as a stalled oil pump. When the spindle of the fluid dynamic bearings of hard disk drives, particularly does not rotate the oil is held in the FDB by capillary when the OAI is located among bearing grooves. We derive a pressures alone. When the spindle rotates the location of the simple analytical expression for the evolution of the OAI of an oil is dominated by fluid dynamic pressures. In some FDB herringbone-type journal bearing. We also report numerical designs one or more of the OAIs are located in the HB of the experiments where we include surface tension as a regularization FDB. This is cause for concern because the grooves disturb parameter. the OAI. When this disturbing effect is strong enough small air bubbles may enter the oil, as reported by Asada et al. [2]. Index Terms—fluid dynamic bearing, hard disk drive, spindle. Once air bubbles are in the FDB they change the rotordynamics and interfere with normal servo operation of I. IINTRODUCTION the HDD. Our main goal is therefore to investigate the OAI when it is located among grooves. Fig. 1 shows a typical T is an acknowledged fact that ball bearing spindles of hard FDB of tied shaft design (TSD) composed of a lower and disk drives are rapidly being replaced by spindles using fluid upper “spool.” Each spool is served by its own oil supply. dynamic bearings (FDB) [1]. Some of the reasons are Note that the radial B-C and journal A-B bearings are joined at their corners B. When the rotor R spins around the stationary shaft S the location of the OAIs is different from those with the spindle at rest. Note that one side of the HB section HB is longer than the other to allow the HB pressure to balance the pressure of the spiral groove thrust bearing SG. During spindle operation the thrust bearing has a capillary buffer C: a tapered reservoir. During standstill oil also partially fills a capillary buffer adjacent to the HB. In this paper, we only study the upper section of the HB with length L .
PROBLEM DESCRIPTION We consider the motion of an incompressible viscous fluid between the stator and rotor as shown in Fig. 2. We use a cylindrical polar coordinate system centered at the stator, but a Fig. 1 Left: characteristic disk drive showing the location of the fluid rotating frame of reference in which the rotor appears fixed. dynamic bearing. Upper right: the spindle bearing as a whole showing upper and lower spool. The journal bearing extends from A to B. The thrust bearing extends from B to C. TSD-detail shows the coupled journal/thrust bearing and its capillary interfaces. The oil-air interface under study is at A. R: rotor; S: stator; d: bearing radial clearance that FDBs offer superior non-repeatable runout (NRRO) and quieter operation. The oil film pressures are created by slanted grooves in either the rotor or stator: the part of the spindle that stands still. We limit ourselves to the study of radial bearings in which the shaft is stationary and does not have any grooves, while the rotor has grooves in the shape of
Manuscript received February 7, 2005. F. Hendriks is a Research Staff Member with Hitachi GST Corp, Hitachi Fig. 2. Rotating coordinate frame. The rotor is rotating with angular velocity San Jose Research Lab., San Jose, CA 95120, USA. (telephone: 408-323- W in the positive q direction with respect to an inertial frame. The 7382, e-mail: ferdi.hendriks@ hitachigst.com). analysis is expressed in a frame fixed to the rotor in which the grooves are B. Tilley is Associate Professor of Mathematics at Olin College of stationary and the stator (shaft) appears to rotate backwards. Engineering, Needham, MA, 02492, USA (e-mail: [email protected]). J. Billingham is Professor of Theoretical Mechanics at the University of In the rotating frame the stator then appears to rotate Nottingham, Nottingham NG7 2RD, UK (e-mail: backwards. The continuity and Navier-Stokes equations are [email protected]) P. Dellar is Lecturer in Applied Mathematics at Imperial College, London, London SW7 2AZ, UK (e-mail: [email protected]) R. Hinch is a Research Fellow at the University of Oxford, Oxford OX1 4AJ, UK (e-mail: [email protected]) > REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK 2 HERE TO EDIT) <
* 抖Z Z �.u 0 (1) +u - u = 0 (7) 抖t q q z * D u 2 2 r= -�p* � m Wu * �2 r W kˆ u * r r rˆ . (2) where Z= Z(q , t) is the average interfacial height of the D t OAI, and the average velocity u = (u, u ) is given by Here the asterisks indicate dimensional variables and rˆ, kˆ are q z the unit vectors in the radial and axial directions, respectively. 1 1 The last two terms in (2) are the Coriolis and centrifugal u = - f2 � p qˆ (8) forces due to the rotating reference frame. Referring to Fig. 2, 12 2 抖 these equations hold in the region where �= qˆ zˆ . The averaging of the normal stress 抖q z r< r < r + d fq, z , 0 < z < Z r , q , t 0 * the stator, while u= 0 at r= ri + d f(q , z) on the rotor. SHALLOW GROOVE LIMIT We impose symmetry conditions on the herringbone Consider the rotor wall profile with shallow grooves * centerline. Along the oil-air interface z= Z( r,q , t) f(q, z) = 1 + d sin( n[ q - k z]) , (10) Z * -u* .n = 0 (3) t where e<< d << 1 is the amplitude of the rotor wall relative s k *=p * - nˆ .T* . n ˆ (4) to the mean gap thickness, n is the number of grooves around * the rotor circumference and k = cot a , where a is the 臌轾nˆ .T n ˆ = 0. (5) groove angle. We expand the pressure and the interfacial where n = �[z Z ( r ,q , t )] is the outward normal at the deflection terms in a power series in d . Fig. 3 shows the interface ( nˆ is the unit vector in the n direction), s is the leading order pressure. surface tension, k * equals twice the mean OAI curvature, T and T* = m 轾� u* u * is the viscous stress. At leading 臌犏 ( ) order pˆ= p ˆ (q , z , t) from the y-momentum equation. Constancy of the pressure across the film and the remaining two momentum equations then lead to a Couette-Poiseuille velocity profile in y= r - ri . Eqn. (1) at leading order takes the form of Reynolds’ equation for an incompressible fluid. 抖禳p 抖 禳 p 睚f3+6 f + 睚 f 3 = 0, (6) Fig. 3. Pressure distribution over one azimuthal period for the wall profile 抖q铪 q 抖z 铪 z f(q, z) = 1 + d sin 臌轾 n( q - k z ) for k = 2 and n = 5 . Top half only. The leading order pressure governed by (9) directly gives us where f(q , z) denotes the wall profile of the grooved rotor. the interfacial deflection Homsy [3] shows that a similar argument may be used near the free surface, invoking the notion of a “passive boundary 骣 t (q ,z ) Z0 (q, t) = Zin 琪 q + - layer.” The concept of a single location and velocity 桫 2 of the free interface forces averaging of the fluid velocities 1 across y . Assuming that there is a single, coherent OAI, we {sinhn sin臌轾 n(q- k) + k cosh n cos 臌轾 n( q - k) - k cos n q } , (11) n(1+ k2 ) cosh n conclude that the free surface must simply follow the planar velocities imposed by the interior lubrication region where (6) holds. The resulting condition on the interface is which yields the magnitude of the OAI deflection as > REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK 3 HERE TO EDIT) < k Z0 = sech n. (12) Zin =0 n(1 + k 2 ) This clearly shows that fewer grooves lead to larger deflection, in agreement with results by Asada et al. [2]. II. NUMERICAL APPROACHES A. Fourier / Finite difference Approach After mapping the physical domain as follows z h = (13) Z(q , t) Z(q , t) was obtained by solving a set of ordinary differential equations for its Fourier coefficients using a Fig. 5. The equations and domains of solution with piecewise constant variable-order ODE integrator [4]. The above model grooved surface. (a) shows a view onto the plane of the fluid bearing and becomes ill-posed in the region of the downward (toward (b) shows a cross section of the grooved surface. negative z) moving part of the OAI. We reintroduced surface tension as a regularizing parameter to suppress numerical instability. We tested this scheme for a rounded-rectangular groove profile given by H f(q, z) = 1 + 1 + tanh轾 s轾 n( q - k z) , (14) 2 { 臌 臌 } where s controls the groove profile steepness, H is the minimum to maximum gap distance (groove depth). Fig. 4 shows the evolution of the free surface for two different values of the regularization parameter s= 10-4 , 5� 10 - 5 , a p / 3, and s = 32 . The groove depth is 2. . Fig.6. Free surface “finger” evolution at various times, computed with the boundary element method for settings H=2, Z0 = 1,q 0 = p /5, n = 5 and a = p /3. ACKNOWLEDGMENT The current paper benefitted from helpful suggestions and computational help of T. Marchant, M. Hameed, P. Evans, S. Patel and D. Tselulko. Hitachi GST supported MPI 2004 held Fig. 4. Evolution of the oil-air interface at t = 0.075, 0.178, 0.277, 0.377 : in at the University of Delaware, Newark, DE., USA. order of increasing maximum downward OAI deflection; for two values of the regularization parameter (surface tension) s = 10-4 and REFERENCES s = 5 10-5 (dotted). Groove depth H = 2 , and the number of [1] W.C. Blount, “Fluid dynamic spindle motors: Their future in hard disk drives,” IBM Corp. White Paper, IBM Storage Systems Group, San grooves is n = 5 . Jose, CA 95193, 2001 [2] T. Asada, H. Saitou, Y. Asaida, and K. Itoh, “Characteristic analysis of B. Boundary Integral Approach hydrodynamic bearings for HDDs,” IEEE Trans. on Magnetics, vol.37, Using the formulation of Fig. 5, interfacial profiles were pp. 810-814, 2001. [3] G.M. Homsy, “Viscous fingering in porous media,” Ann. Rev. Fluid obtained with the boundary element method (BEM) for Mech., vol. 19, pp. 271-311, 1987. piecewise constant f, a common occurrence in FDBs. The [4] P.N.Brown, G.D. Byrne, and A.C. Hindmarsh, “VODE, a variable BEM solution method we use is similar to that used by Kelly coefficient ODE solver," SIAM J. Sci. Statist. Comput., vol 10, pp. 1038- and Hinch [5]. Fig. 6 shows some computed surface 1051, 1989. [5] E.D. Kelly and E.J. Hinch, “Numerical simulations of sink flow in the evolutions, again showing a tendency for OAI ‘fingering.’ Hele-Shaw cell with small surface tension,” Euro. J. Appl. Math, vol. 8, pp. 533-550, 1997.