Automatic Motion Control of Powered Wheel Chair by the Movements of Eye Blink
Manoj Challagundla School of Electronics and K.Yogeshwar Reddy Shashank Chaurasia Communication Engineering School of Electronics and School of Electronics and VIT University Communication Engineering Communication Engineering Vellore, India VIT University VIT University [email protected] Vellore, India Vellore, India [email protected] [email protected]
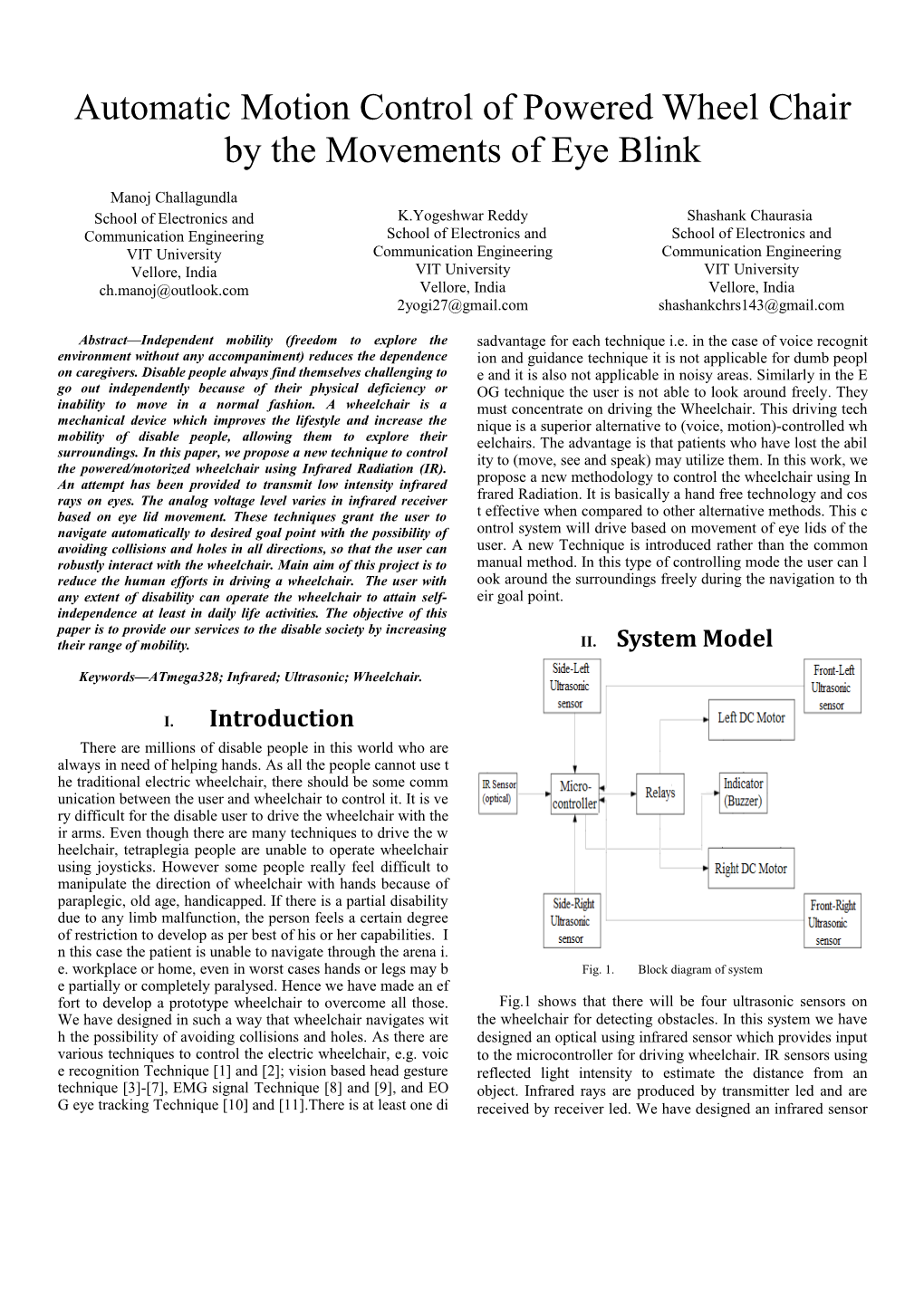
Abstract—Independent mobility (freedom to explore the sadvantage for each technique i.e. in the case of voice recognit environment without any accompaniment) reduces the dependence ion and guidance technique it is not applicable for dumb peopl on caregivers. Disable people always find themselves challenging to e and it is also not applicable in noisy areas. Similarly in the E go out independently because of their physical deficiency or OG technique the user is not able to look around freely. They inability to move in a normal fashion. A wheelchair is a must concentrate on driving the Wheelchair. This driving tech mechanical device which improves the lifestyle and increase the nique is a superior alternative to (voice, motion)-controlled wh mobility of disable people, allowing them to explore their eelchairs. The advantage is that patients who have lost the abil surroundings. In this paper, we propose a new technique to control ity to (move, see and speak) may utilize them. In this work, we the powered/motorized wheelchair using Infrared Radiation (IR). An attempt has been provided to transmit low intensity infrared propose a new methodology to control the wheelchair using In rays on eyes. The analog voltage level varies in infrared receiver frared Radiation. It is basically a hand free technology and cos based on eye lid movement. These techniques grant the user to t effective when compared to other alternative methods. This c navigate automatically to desired goal point with the possibility of ontrol system will drive based on movement of eye lids of the avoiding collisions and holes in all directions, so that the user can user. A new Technique is introduced rather than the common robustly interact with the wheelchair. Main aim of this project is to manual method. In this type of controlling mode the user can l reduce the human efforts in driving a wheelchair. The user with ook around the surroundings freely during the navigation to th any extent of disability can operate the wheelchair to attain self- eir goal point. independence at least in daily life activities. The objective of this paper is to provide our services to the disable society by increasing their range of mobility. II. System Model
Keywords—ATmega328; Infrared; Ultrasonic; Wheelchair.
I. Introduction There are millions of disable people in this world who are always in need of helping hands. As all the people cannot use t he traditional electric wheelchair, there should be some comm unication between the user and wheelchair to control it. It is ve ry difficult for the disable user to drive the wheelchair with the ir arms. Even though there are many techniques to drive the w heelchair, tetraplegia people are unable to operate wheelchair using joysticks. However some people really feel difficult to manipulate the direction of wheelchair with hands because of paraplegic, old age, handicapped. If there is a partial disability due to any limb malfunction, the person feels a certain degree of restriction to develop as per best of his or her capabilities. I n this case the patient is unable to navigate through the arena i. e. workplace or home, even in worst cases hands or legs may b Fig. 1. Block diagram of system e partially or completely paralysed. Hence we have made an ef fort to develop a prototype wheelchair to overcome all those. Fig.1 shows that there will be four ultrasonic sensors on We have designed in such a way that wheelchair navigates wit the wheelchair for detecting obstacles. In this system we have h the possibility of avoiding collisions and holes. As there are designed an optical using infrared sensor which provides input various techniques to control the electric wheelchair, e.g. voic to the microcontroller for driving wheelchair. IR sensors using e recognition Technique [1] and [2]; vision based head gesture reflected light intensity to estimate the distance from an technique [3]-[7], EMG signal Technique [8] and [9], and EO object. Infrared rays are produced by transmitter led and are G eye tracking Technique [10] and [11].There is at least one di received by receiver led. We have designed an infrared sensor circuit shown in fig.2. The 2 glasses in the optical are replaced As we know that absorption and reflection differ from by the sensors shown in fig.3. surface to surface. For e.g. If we wear black color clothes in summer we feel more heat than wearing white clothes. In the similar manner our eye lids will absorb more IR rays and reflect less IR rays because it is darker region when compared to first set of region. Whereas first set of region absorb less IR rays and reflect more IR rays because it is light color region when compared to second set of region. So the IR receiver receives more IR rays in open condition of eye (first region). Similarly IR receiver receives less IR rays in the closed condition of eye (second region). Fig. 2. Infrared Sensor Design III.Wheelchair direction table In this system the user must wear their optical to navigate Left eye lid Right eye lid Wheelchair with wheelchair to reach the desired goal point. As the IR movement movement movement sensor modules are opaque, the user must wear optical that is Open Open Forward positioned down the eyes, so that both the infrared sensors are inclined to focus on the eye region. The user can see the Close Close Backward surroundings freely and no need to pay more concentration Open Close Right while driving wheelchair. Also there will not be any Close Open Left distraction in the motion of wheelchair caused by any We can obtain 4 logics as shown in table I (opening both unwanted movements. eyes, closing both eyes, left open-right close, left close-right open) to drive the wheelchair in all directions. IV.Motor Movement Table Wheelchair Left motor Right motor direction movement movement Forward Forward Forward Backward Backward Backward Left Stop Forward Right Forward Stop Stop Stop Stop Fig. 3. Design of optical In this system we commanded the microcontroller to take As shown in fig.4, we focus on some parts of eye such as the readings from sensor for every 1.5seconds. As our normal Iris, Pupil, Sclera and eye lids. We considered Iris, Pupil, and eye blink will be for a fraction of second, so it will not distract Sclera as first set of region and eye lids as second set of the motion of wheelchair any more. We can also control the region. Whenever we focus any light on a surface some of the speed of motors by Pulse Width Modulation (PWM) technique light rays get absorbed by the surface and some will be or by varying the supply voltage to the motors. But controlling reflected back by the surface. Based on the above property the speed of motors is not necessary because the maximum whenever we focus a low intensity IR rays on our eye, some speed of wheelchair will be 5Kmph. It will move with a speed will get absorbed by the surface of eye and some will get similar to man walking speed. In this controlling system reflected back by the surface of eye. Those reflected IR rays wheelchair will stop automatically if there is any obstacle, are received by IR receiver. which can be detected by using Ultrasonic sensors.
V. Algorithm We have written an algorithm for controlling the direction of wheelchair according to movement of blinking of eye of the user. Whenever the user opens their both eyes, we commanded the microcontroller to turn on both motors to drive the wheelchair in forward direction. Whenever the user closes their both eyes, we commanded the microcontroller to turn on both Fig. 4. Eye parts motors to drive the wheelchair in backward direction. Whenever the user close their left eye and open their right eye, we commanded the microcontroller to turn on Right motor only to drive the wheelchair in Left direction. Whenever the user close their right eye and open their left eye, we commanded the microcontroller to turn on Left motor only to drive the wheelchair in Right direct ion. Whenever the user doesn't wear optical, we command ed the microcontroller to turn off both motors to stop t he wheelchair.
Fig. 6. ATmega328 VI. Flow Chart B. Ultrasonic Sensor Ultrasonic sensor is used to detect an object/obstacle. It is a type of sensor that uses sound waves to detect an object or ta rget. It is mainly used in robotics. It has trigger and echo pins i n which trigger sends a sonic pulse in the cone shape and echo receives the transmitted pulse which is reflected from an objec t or obstacle. It detects an object/obstacle by calculating the va riation in time when trigger transmit a pulse and echo that rece ives pulse. The major drawback is that, it is not able to detect t he object size and color.
Fig. 7. Ultrasonic sensor
C. Relays As the microcontroller output is 5V, 500mA, which is not Fig. 5. Flow chart of the system sufficient to drive motors, so we use relays. We use relay to op Fig.5 shows the flow chart of the system (Forward, erate High (Current, Voltage) appliance with Low (Current, V Backward, Left, Right) represents the direction of the oltage) appliances. wheelchair while both open and both close refer to Both Eyes MECHANISM: Opened condition and Both Eyes Closed condition Relay is an electromechanical switch which is operated b respectively. y a coil inside it. When we supply a voltage to the coil it devel ops an electromagnetic field around it. The switch toggles bas ed on potential difference created across the coil. As shown in VII. Hardware Description fig.8. There are 3 terminals in relay as Common (COM), Nor mally Open (NO), Normally Close (NC). Initially Common ter A. Microcontroller minal is connected to Normally Closed. Whenever the potentia Atmega328 is a high performance low power, 8 bit-RISC b l difference is created across coil, then the switch toggles to N ased microcontroller that can also be used in arduino board. It ormally Open terminal. has 14 digital I/O pins out of which 6 pins provide Pulse Widt h Modulation outputs, 6 analog inputs with a 16MHz crystal o scillator. It provides UART TTL serial communication. Atmeg a328 combines 32 KB flash memory, 2 KB SRAM, 1 KB EEP ROM with 10 bit A/D converter. All the readings shown below belong to infrared receiver that is interfaced to ATmega328 microcontroller.
Fig. 8. Internal circuitry of relay As shown in fig.8, one end of coil is connected to 5V and other terminal to digital pin of ATmega328 microcontroller. Fig. 10. Sensor Readings for Optical Not Wear Condition When we supply 0V to digital pin of microcontroller then the 1) Since in this case user is not wearing the optical, so the potential difference is V= 5V-0V=5V. So the relay will be analog sensor readings of both left and right eye sensor is ON. When we supply 5V to digital pin then the potential high, fig.10. difference is V= 5V-5V=0V. So the relay will be OFF. So the ON/OFF of Relay depends on input of digital pin. We have used (30V, 10A) DC rated relay to control (24V, 4.5A) DC motors to drive the wheelchair.
Fig. 11. Sensor Readings when both Eyes are opened 2) In this case user’s both eyes are open, so analog sensor readings are approximately equal because infrared rays are directly entering into the pupil of the eye, fig.11.
Fig. 9. Relay interfacing with diode and transistor Since we are dealing with some high current and voltage s ome additional protection circuit is added with transistors and diodes in the relay module as shown in fig.9. We used 4 relays to control 4 direction using 2 motors i.e. each motor will use 2 relays. In other words, 1 terminal of 1 motor use 1 relay. The motors turn in reverse direction whenever the reverse polarity is applied.
VIII. Experimental Results This study has been experimented on how well a simple and low cost wheelchair functions. Infrared sensors has been Fig. 12. Sensor Readings when both Eyes are closed initially calibrated and tested for distance from 3cms to 9cms, 3) In this case user’s both eyes are closed, since eye lids having deviation of ±0.3% with actual distance. We have used block the intensity of rays entering into pupil, hence arduino software to control the ATmega328 microcontroller. analog sensor readings will be less and equal, fig.12. Fig. 15. Prototype of the proposed system
In this mechanism the user can freely look at the Fig. 13. Sensor Readings When left Eye is closed and Right Eye is opened surroundings while the navigation process to their desired goal point will be done automatically. There will not be any 4) In this case user’s left eye is closed and right is opened, so distraction in the motion due to their normal eye blink. In this analog sensor readings of right eye receiver led is high as method the user have to observe the analog voltage readings compared to left eye receiver, fig.13. for their eye lids movement and can develop the code accordingly to control the wheelchair. Future work includes the installation of GPS which makes a real time system that monitors position of the disable for a secure outdoor environmental exploration.
References [1] Hugues Sert, S.P. Levine, D.A. Bell, L.A. Jaros, R.C. Simpson, Y.Koren, and J. Borenstein, “The NavChair assistive wheelchair navigation system,” IEEE Transactions on Rehabilitation Engineering, Vol. 7, No. 4, pp. 443-451,Dec. 1999. [2] D. Cagigas and J. Abascal, “Hierarchical path search with partial materialization of costs for a smart wheelchair,” Journal of Intelligent and Robotic Systems, Vol. 39, No. 4, pp. 409-431, Apr. 2004. [3] Y. Wei, “Vision-based human-robot interaction and navigation of intelligent service robots”, PhD Thesis, Institute of Automation, Chinese Academy of Sciences, Beijing, China, 2004. Fig. 14. Sensor Readings When left Eye is closed and Right Eye is opened [4] Y. Matsumoto, T. Ino, and T. Ogasawara, “Development of intelligent 5) In this case user’s right eye is closed and left is opened, so wheelchair system with face- and gazebased interface,” in Proceedings of the 10th International Workshop IEEE Robot & Human Interactive analog sensor readings of left eye receiver led is high as Communication, Bordeaux-Paris, France, pp. 262-267, 2001. compared to right eye receiver, fig.14. [5] S. Nakanishi, Y. Kuno, N. Shimada, and Y. Shirai, “Robotic wheelchair based on observations of both user and environment,” in Proceedings of IEEE/RSJ International Conference on Robots and Systems, Kyongju, Korea, pp. 912-917, 1999. IX. Conclusion [6] Y. Kuno, Y. Murakami, and N. Shimada, “User and social interfaces by This paper proposed the design of new concept of motion observing human faces for intelligent wheelchairs,” ACM International Conference Proceeding Series Archive, Proc. Workshop on Perceptive control of wheelchair using eye lids movement as shown in User Interfaces, Orlando, Florida, USA, pp. 1-4, 2001. fig.15. The main purpose of this study is to develop a [7] P. Jia, H. Hu, T. Lu, and K. Yuan, “Head gesture recognition for hands prototype that can detect obstacle and make disables self- free control of an intelligent wheelchair,” Journal of Industrial Robot, dependent by increasing their range of mobility. There are Vol. 34, No.1, pp. 60-68, 2007. [8] T. Felzer and B. Freisleben, “HaWCoS: The “handsfree” wheelchair four broad beam angle ultrasonic sensors integrated in order to control system,” in Proc. 5th Int. ACM Conf. on Assistive Technologies, detect obstacle and to obtain detailed regarding disable’s Edinburgh, Scotland, pp. 127-134, 2002. environment. We have developed some logics to control the [9] I. Moon, M. Lee, J. Chu, and M. Mun, “Wearable EMGbased HCI for wheelchair through infrared sensors as if any user wants to electric-powered wheelchair users withmotor disabilities,” Proceedings of IEEE International Conference on Robotics and Automation, drive the wheelchair forward, simply he should open both the Barcelona, Spain, pp. 2649-2654, 2005. eyes. If he wants to drive it backward, he should close both the [10] M. Mazo, “An integral system for assisted mobility,” IEEE Robotics & eyes. Similarly if he wants it to turn left, he should close his Automation Magazine, Vol. 8, No. 1, pp. 46-56, Mar. 2001. left eye and open his right eye. And if he wants it to turn right, [11] H.A. Yanco, “Wheelesley, a robotic wheelchair system: Indoor navigation and user interface,” In: Mittal VO, Yanco HA, Aronis J, he should close his right eye and open his left eye. But if the Simpson RC, eds., Lecture Notes in Artificial Intelligence: Assistive user wants to stop the wheelchair, he should remove his Technology and Artificial Intelligence: Applications in Robotics, User optical. Interfaces and Natural Language Processing, Springer- 1270 Verlag, Heidelburg, Germany, Vol. 1458, pp. 256-268, 1998. [14] Deng, L. Y., Hsu, C. L., Lin, T. C., Tuan, J. S., Chang, S. M., "EOG [12] Hashimoto, M., K. Takahashi, and M. Shimada, “Wheelchair control based Human-Computer Interface system development," Journal of using an EOG- and EMG-based gesture interface,” IEEE/ASME Expert Systems with Applications, Vol. 37, pp. 3337-3343, 2010. International Conference on Advanced Intelligent Mechatronics, [15] R. Barea, L. B., M. Mazo and E. López, "Wheelchair Guidance AIM.2009. Strategies Using EOG," Journal of Intelligent and Robotic Systems 34, [13] Tsui, C.S.L., “EMG-based hands-free wheelchair control with EOG Number 3 / July, 2002. attention shift detection,” IEEE International Conference on Robotics [16] Yathunanthan, L. U. R. Chandrasena, “Controlling a wheelchair by use and Biomimetic, ROBIO. 2008. of EOG signal,” Proceedings of the 2008 4th International Conference on Information and Automation for Sustainability, ICIAFS 2008.