Optics - The Series Aspect Ratio & Stiffness of Solid Mirrors Shane Santi – President Dream Telescopes & Accessories, Inc. Copyright 2017 – v4
The most common aspect ratio referenced in front-surface mirrors is the 6:1 or “full-thickness” aspect ratio. 50- 100 years ago when most mirrors were 6-8” in diameter, this ratio worked well. But as front-surface mirrors have become far more commonplace, their diameters have gone up drastically. The 6:1 aspect ratio has carried on to these larger diameters but unfortunately it is not a magic ratio that provides the same stiffness as small (6”) mirrors.
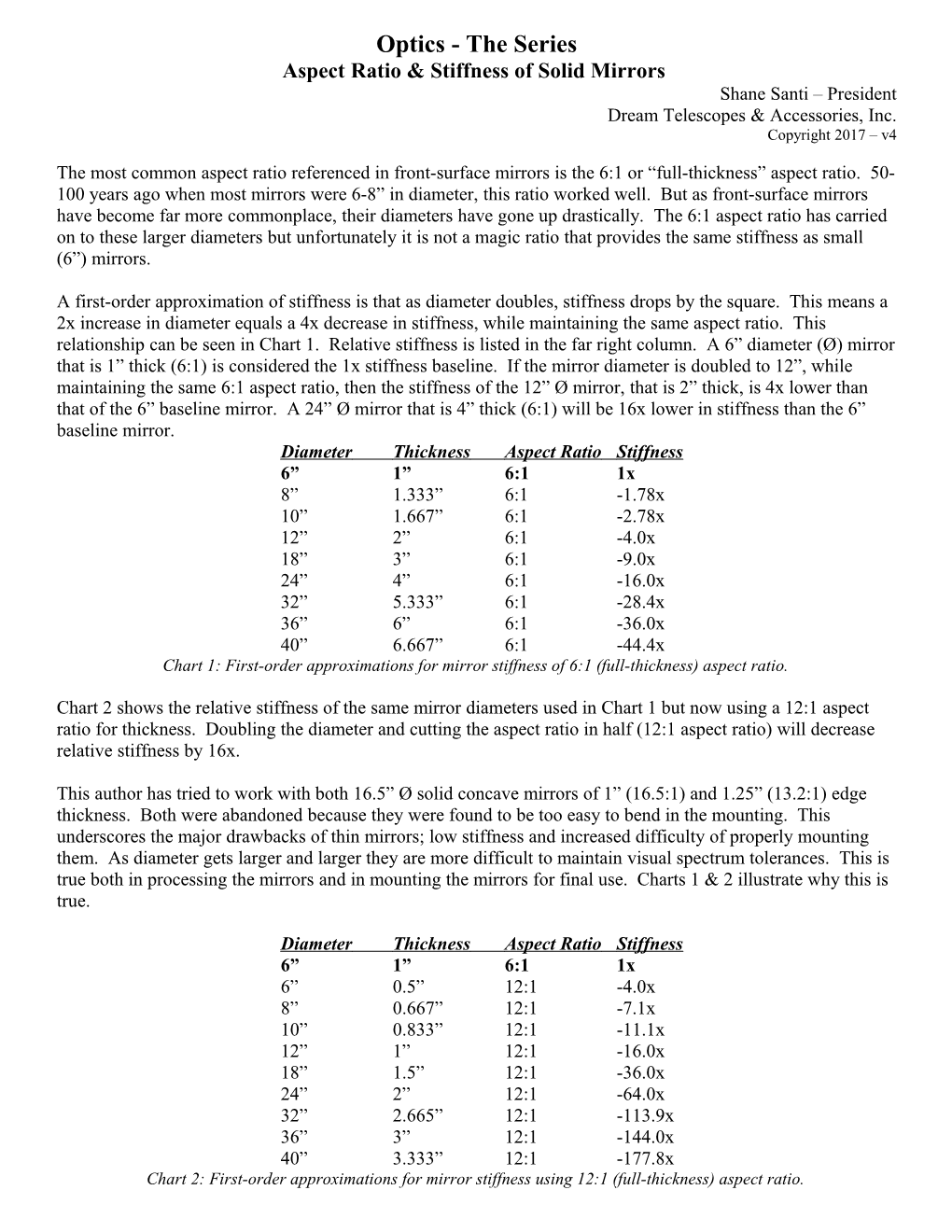
A first-order approximation of stiffness is that as diameter doubles, stiffness drops by the square. This means a 2x increase in diameter equals a 4x decrease in stiffness, while maintaining the same aspect ratio. This relationship can be seen in Chart 1. Relative stiffness is listed in the far right column. A 6” diameter (Ø) mirror that is 1” thick (6:1) is considered the 1x stiffness baseline. If the mirror diameter is doubled to 12”, while maintaining the same 6:1 aspect ratio, then the stiffness of the 12” Ø mirror, that is 2” thick, is 4x lower than that of the 6” baseline mirror. A 24” Ø mirror that is 4” thick (6:1) will be 16x lower in stiffness than the 6” baseline mirror. Diameter Thickness Aspect Ratio Stiffness 6” 1” 6:1 1x 8” 1.333” 6:1 -1.78x 10” 1.667” 6:1 -2.78x 12” 2” 6:1 -4.0x 18” 3” 6:1 -9.0x 24” 4” 6:1 -16.0x 32” 5.333” 6:1 -28.4x 36” 6” 6:1 -36.0x 40” 6.667” 6:1 -44.4x Chart 1: First-order approximations for mirror stiffness of 6:1 (full-thickness) aspect ratio.
Chart 2 shows the relative stiffness of the same mirror diameters used in Chart 1 but now using a 12:1 aspect ratio for thickness. Doubling the diameter and cutting the aspect ratio in half (12:1 aspect ratio) will decrease relative stiffness by 16x.
This author has tried to work with both 16.5” Ø solid concave mirrors of 1” (16.5:1) and 1.25” (13.2:1) edge thickness. Both were abandoned because they were found to be too easy to bend in the mounting. This underscores the major drawbacks of thin mirrors; low stiffness and increased difficulty of properly mounting them. As diameter gets larger and larger they are more difficult to maintain visual spectrum tolerances. This is true both in processing the mirrors and in mounting the mirrors for final use. Charts 1 & 2 illustrate why this is true.
Diameter Thickness Aspect Ratio Stiffness 6” 1” 6:1 1x 6” 0.5” 12:1 -4.0x 8” 0.667” 12:1 -7.1x 10” 0.833” 12:1 -11.1x 12” 1” 12:1 -16.0x 18” 1.5” 12:1 -36.0x 24” 2” 12:1 -64.0x 32” 2.665” 12:1 -113.9x 36” 3” 12:1 -144.0x 40” 3.333” 12:1 -177.8x Chart 2: First-order approximations for mirror stiffness using 12:1 (full-thickness) aspect ratio. By using this first-order approximation we find that a 36” diameter mirror needs to be 36” in thickness in order to equal the stiffness of the 6” baseline mirror! A 40” mirror has to be over 44” in thickness to equal the 6” baseline mirror. Obviously neither of these examples is practical. However, it should be noted that some reference optics use a 2:1 aspect ratio. Using this 2:1 aspect ratio an 18” Ø mirror would be 9” thick and would equal the stiffness of the 6” baseline mirror.
The general function of a mirror mount is to spread the loads across larger areas and to maintain a given optical surface, as well as alignment tolerances. Often the mirror’s angle and temperature are changing dynamically. All mirror mounts will distort the optical surface, both while temperature is static and also when there is a change in temperature. Scale determines whether these distortions are making a noticeable impact on performance or not. Mirrors can be surprisingly easy to distort.
When a mirror’s optical axis is pointing straight up the back axial supports need to equalize the forces on the back of the mirror; each point supporting the exact same amount of load. Kinematic supports inherently strive for this goal. They are typically based on 3’s; 3-point, 6-point, 9-point, etc., support points. A 3-legged table will not rock and it will have equal forces on all three legs, which is why 3’s are so important in kinematic mountings.
Large diameter mirrors will use more support points (9, 18, 27, 54, etc.) and in theory have the potential to maintain the same optical surface quality as the 6” baseline mirror that only needs a simple 3-point support. However, more complex mirror mounts, by their very nature, are more prone to errors, including human errors; design and/or implementation errors. As greater and greater numbers of axial support points are used behind the mirror, the mechanics of how that more complex kinematic support is accomplishing the goal are critical. Lateral support, often done at the outer edge, also becomes more difficult and can be a deep topic in an of itself for larger diameter mirrors.
Common errors in mirror mounts can be but are not limited to: Bearings of some type inevitably have to be used. If any bearing is not functioning smoothly, it can make one or more support points out of balance with the others. If the pivot point, which needs to coincide with the center of gravity of the support triangle, was not calculated correctly, the three points will not apply equal forces to the back of the mirror. The exact manner in which the back axial support points interface with the back of the mirror is critical as well and can cause numerous issues. In some situations thermal issues alone can cause one or more support points to go out of balance and/or shift laterally, simply from using materials with dissimilar Coefficient of Thermal Expansion (CTE).
Although a greater number of support points might seem like the easy solution for the lowered relative stiffness of large mirrors, the task is far more difficult and complex than supporting smaller diameter mirrors, which are inherently stiffer and can therefore use simplified support mechanics. Again, Charts 1 & 2 illustrate why this is often the case. Stiffness is always important because as stiffness goes down, it takes less and less force to distort the mirror to the noticeable threshold. It does not require much errand force to distort a visual spectrum mirror that is trying to maintain an optical surface to fractions of a wavelength of visual light.
Material Choice - The above comparisons for stiffness laid the foundation but were based on one mirror material. As long as the mirror material is constant, the above information is valid. The below information will compare the specific stiffness differences between numerous mirror materials.
Defining the stiffness of a material by Young’s Modulus alone is not enough. Density has to be accounted for as well, to include self-weight deflection. Specific Stiffness is defined as Young’s Modulus (stiffness) divided by density. For example Schott’s materials Borofloat and Zerodur each have a Young’s Modulus of 64 kN/mm² and 90 kN/mm² respectively. If we only look at Young’s Modulus we would incorrectly state that Zerodur is 40.6% “stiffer” than Borofloat. When in fact Zerodur is 24.0% higher in specific stiffness than Borofloat. Specific Stiffness Compared To Baseline N-BK7 32.5 16.1% stiffer Plate Glass 28.0 1 (baseline) Borofloat 28.7 2.5% Fused Silica 33.2 18.6% AstroSittal 28.7 2.5% Zerodur 35.6 27.1% Chart 3: Specific stiffness of different mirror materials.
If we compare the most extreme example in Chart 3, we see that Zerodur is 27.1% (1.27x) higher in specific stiffness compared to plate glass. This level of improvement pales in comparison to the stiffness losses shown in Chart’s 1 and 2 from small to large diameter mirrors. For example, 6:1 aspect ratio 6” and 24” diameter mirrors show the 24” has a 16x decrease in stiffness compared to the 6” of the same aspect ratio and material. If the 6” was made from plate glass and the 24” was switched to Zerodur, the Zerodur mirror would still be nearly 12x lower in stiffness than the 6” plate glass mirror. Although this is an improvement it is not a magic bullet that eliminates sizeable stiffness losses as the diameter of the mirror grows.
This underscores the importance of knowing basics about materials and understanding stiffness to a deeper level. This knowledge can help designers and engineers make choices that are based on grounded information.
Copyright 2017 Dream Telescopes & Acc., Inc. - www.dreamscopes.com