1ONLINE RESOURCE 1. DOUGLAS ARGOS-FILTER ALGORITHM
2In order to improve data accuracy and remove implausible locations, all class location has been filtered by 3a SAS-routine, Argos-Filter v7.03 (Douglas 2006, USGS/ASC).
4This filter flags implausible location based on user-prescribed parameters that depend on the movement 5behaviour of the specie:
6 - Distance between near-consecutive locations (MAXREDUN). This parameter is based on the 7 spatiotemporal redundancy under the premise that significant location errors rarely occur in the 8 same place twice, consecutively.
9 - Turning angles between consecutive vector lines of the previous and following location 10 (RATECOEF). It is based on the fact that an animal doesn’t move a substantial distance and 11 returned with an acute angle (less than the user-defined threshold) as that behaviour results in a 12 tracking path that goes ‘out-and-back’, and it is biologically unreasonable (but not always) that 13 an animal moves far away and immediately returns back toward the previous position.
14 - Maximum swim speed (MINRATE). It is based on a plausible rate of movement that it is 15 considered that the studied specie might sustain over a period of hours or days.
16These parameters are used on two different filtering methods: the Minimum Redundant Distance filter 17(MRD) and the Distance, Angle and Rate (DAR) filter, evaluating three consecutive locations of the raw 18data simultaneously. The SAS program automatically writes the results into separate output files. Each 19file contains a different set of information (locations) depending on the filters that the raw tracking data 20have passed.
21Moreover, the user can define the Argos Location Class to be considered either in the MRD or in the 22DAR filter (KEEP_LC). In this study we have only excluded invalid location (LC Z, 6.3% of the original 23Argos data), and included all others, that is LC3, 2, 1, 0, LC A and LC B mainly for three reasons: 1. 24Low-quality locations (Argos classes A, B and Z) are the most commonly acquired locations in marine 25mammals as they surface briefly to breath, thus the uplinks to the satellites are severely limited (Costa et 26al. 2010, Douglas et al. 2012). In our study, only 16.6% of locations belong to high quality location class 27LC 3, 2, 1 and 0 (3.9%, 5.3%, 4.9% and 2.4% respectively) while 77.1% belong to A, B or Z (6.9%, 2870.2% and 6.3%, respectively). 2. Larger errors than Argos theoretical estimates are evidenced with 29marine animal studies (Costa et al. 2010, Witt et al. 2010, Douglas et al. 2012). 3. Similar accuracy to LC 301 can be obtained even with the LC A location, and LC B locations are acceptable if they are appropriate 31filtered, so they can provide useful information in marine animals with a large range of movements 32(Vincent et al. 2002, Sveegaard et al. 2011).
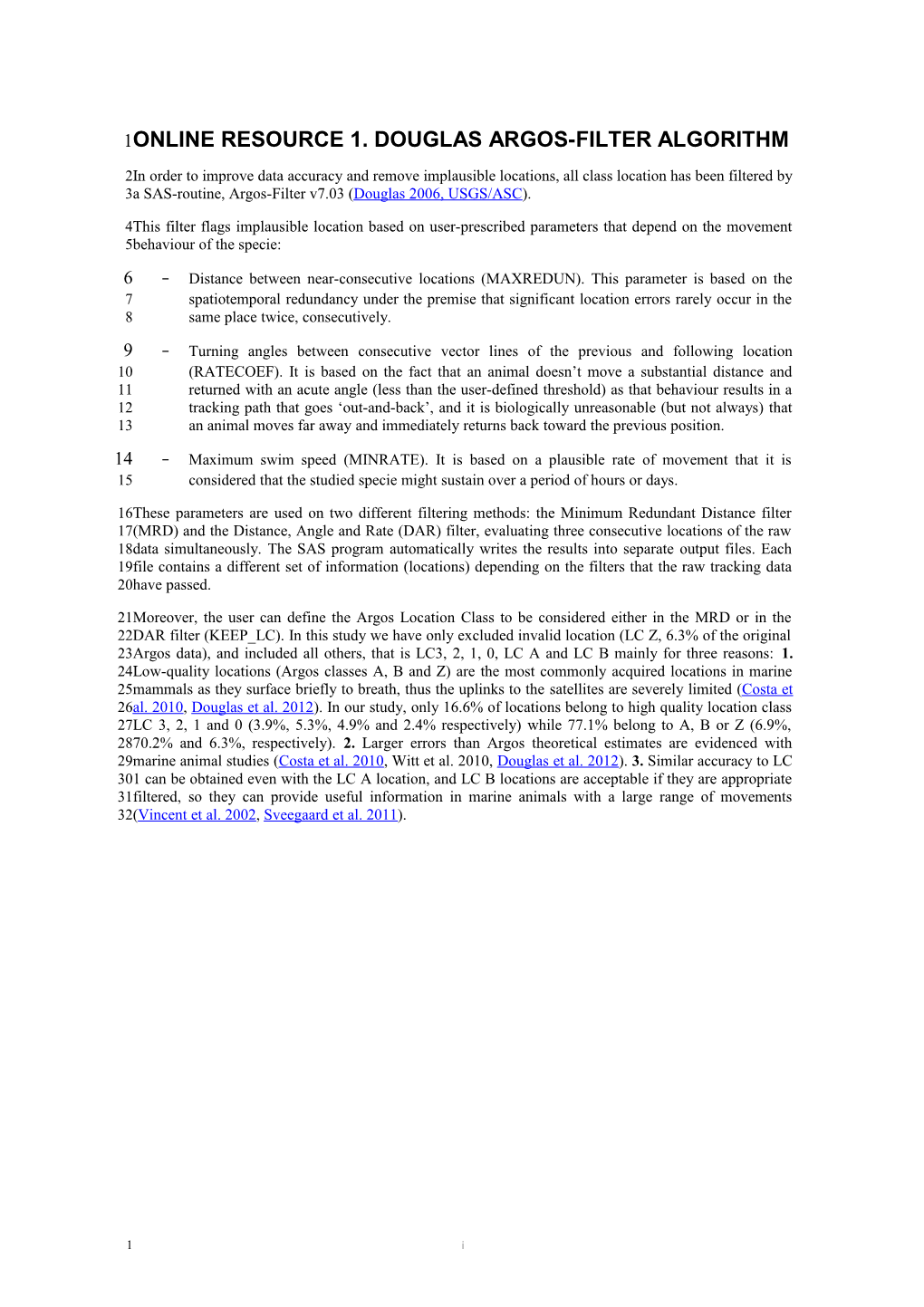
1 i 33We have tested, with all positions, the influence of several values for MAXREDUN (2 km, 5 km and 10 34km) by comparing the filtered results and no statistically significant differences have been found neither 35in the number of removed locations (41.9% for d=2km, 40.2% for d=5 km and 36.0% for d=10 km) nor in 36Argos accuracy of the retained locations (LC 3–0: 24.5% for d=2 km and 5 km and 23.7% for d=10 km; 37LC A and B: 73.7% for d=2 km and 5 km, and 74.5% for d=10 km). The results are summarized in Table 38a and Figure a. We have also measured the differences in the trajectories total length using the smaller 39distance value (2 km) versus the greater one (10 km), which ranged from 299 km for seal Green to 931 40km for the seal with Blue (4.02% and 6.03% of each longest track, respectively). Thus, the minimum 41distance value -2 km- has been chosen as it has slightly higher overall accuracy and it is the most 42conservative (fewer locations are selected) with visually less acute trajectory when it has been plotted. 43Detailed maps of the filtering process have been added in Figure b. This distance value (2 km) has also 44been used for obtaining the best position per day locations.
45To our knowledge there are no velocity measurements for Ross seals in the wild. Kooyman (1989) 46defined a cruising speed of aquatic animals up to about 3m in length between 3.6 and 7.2 Km/h. It has 47been also demonstrated that routinely swim speed for many marine mammals, regardless of their body
70.0 67.0 66.9 67.3
60.0
50.0 s
n 40.0 o i
t a % c o l
f 30.0 o
20.0
8.5 8.4 7.9 10.0 6.8 6.6 6.2 6.8 7.0 6.8 6.7 6.8 7.2 2.3 2.5 2.9 1.9 1.8 1.8
0.0 LC 3 LC 2 LC 1 LC 0 LC A LC B LC Z Location quality classes
d=2 km d=5 km d=10 km
48Figure 1.1. Percentage of locations of each quality class (n=4 Ross seals) for the highest quality locations of duty- 49cycle from the subset data that passed the DAR plausibility filter (pkr10d#lc3), using as a distance threshold 2 km 50(grey), 5 km (black) and 10 km (white with dots). 51size is between 1.0 and 3.6 m/s (Thomas and Rogers 2009). For pinnipeds, sustained swimming speeds 52for horizontal swimming and diving of 2.2 km/h to 9.4 km/h have been reported (Thomas and Rogers 532009). In order to avoid overestimation of high swimming speed, a threshold of 10 km/h have been used 54as maximum swim speed (MINRATE), slightly higher value that those defined by Kooyman (1989) 55(Sveegard et al. 2011). The turning angle (RATECOEF) has been set to 10º and the other parameters as 56default (Sveegard et al. 2011).
57As previously has been said, the SAS program automatically writes the results into separate output files 58with different set of information (locations) depending on the filters that the original have passed. In this 59study, the chosen one has been “pkr10d2lc3”, which contains only the locations that were selected as the 60“highest quality of duty-cycle” from the subset data that passed the DAR plausibility filter, as it was 61concluded to be the most appropriate for the geographical analysis in this kind of studies (Sveegard et al. 622011), resulting, when filtering all locations, in 3802 locations (plus 4 deployment locations): 1078 for 63seal Yellow, 1370 for seal Blue, 808 for seal Red and 546 for seal Green (Table 1).
2 ii 64Among all locations, Argos Filter routine automatically selects the daily most accurate location, based on 65the Argos Location Class and the number of uplinks per transmission (Sveegard et al. 2011). We obtained 66749 locations (plus 4 deployment locations): 231 for seal Yellow, 284 for seal Blue, 149 for seal Red and 6789 for seal Green (Table 1).
DAR-filter % each 1 % each without % Location Class location location/day location filtering removed class MAXREDUN= class 2 km L3: accuracy < 250 m 258 3.9 94 12.6 63.6 L2: accuracy [250,500) m 350 5.3 27 3.6 92.3 L1: accuracy [500,1500) m 320 4.9 22 2.9 93.1 L0: accuracy > 1500 m 156 2.4 25 3.3 84.0 LA: no estimate of location accuracy 454 6.9 88 11.7 80.6 LB: no estimate of location accuracy 4597 70.2 483 64.5 89.5 LZ: invalid location 414 6.3 10 1.3 97.6 Total 6549 100.0 749 100.0 88.6
DAR-filter DAR-filter DAR-filter % each % each % each All All % All % Location Class location % removed location location locations locations removed locations removed class class class MAXREDUN MAXREDUN MAXREDUN =2 km =5 km =10 km
L3: accuracy < 250 m 258 6.8 0.0 258 6.6 0.0 258 6.2 0.0 L2: accuracy [250,500) m 325 8.5 7.1 328 8.4 6.3 330 7.9 5.7 L1: accuracy [500,1500) m 260 6.8 18.8 275 7.0 14.1 287 6.8 10.3 L0: accuracy > 1500 m 87 2.3 44.2 96 2.5 38.5 120 2.9 23.1 LA: no estimate of location accuracy 254 6.7 44.1 267 6.8 41.2 302 7.2 33.5 LB: no estimate of location accuracy 2547 67.0 44.6 2618 66.9 43.0 2820 67.3 38.7 LZ: invalid location 71 1.9 82.9 72 1.8 82.6 74 1.8 82.1 Total 3802 100.0 41.9 3914 100.0 40.2 4191 100.0 36.0
68Table a. Number of locations of the dataset (4 Ross seals) a.before using the DAR filter; b. all location that passed 69the DAR filter with the different MAXREDUN threshold: 2km, 5 km and 10 km; c. the best location per day with 70MAXREDUN threshold of 2 km.
71Douglas et al. (2012) reported than the DAR-filter is able to improve data accuracy by 50–90%. In our 72study between 36.0 % and 41.9 % of the original Argos locations (that already have passed the Kalman 73filter) were removed when using the DAR-filter with different distance threshold and including all 74positions, and 88.6% when only including the best location per day with a distance threshold of 2 km 75(Table 1).
76Detailed information on the filtering is provided by Sveegard et al. (2011) and 77http://alaska.usgs.gov/science/biology/spatial/douglas.html.
3 iii 4
78
79Figure b. Track of the seals (here and in the next 3 pages) 1. before filtering (raw Argos data) 2. after 80applying DAR-filter with a distance between near-consecutive locations(Maxredun) of 2 km (in yellow, 81blue, red and green for seal Yellow, Blue, Red and Green respectively), 5 km (in gray) and 10 km (in 82black) and with a detailed section 3. the best position per day after applying DAR-filter to the original 83data using as a Maxredun a threshold of 2 km. Polar stereographic map projection, WGS84. Note that 84scales are different according to individual movements.
5 85 86
6 v 87 88
7 vi 89 90
8 vii 91
9 viii