Chapter 10 Conics, Parametric Equations, and Polar Coordinates
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bézout's Theorem
Bézout's theorem Toni Annala Contents 1 Introduction 2 2 Bézout's theorem 4 2.1 Ane plane curves . .4 2.2 Projective plane curves . .6 2.3 An elementary proof for the upper bound . 10 2.4 Intersection numbers . 12 2.5 Proof of Bézout's theorem . 16 3 Intersections in Pn 20 3.1 The Hilbert series and the Hilbert polynomial . 20 3.2 A brief overview of the modern theory . 24 3.3 Intersections of hypersurfaces in Pn ...................... 26 3.4 Intersections of subvarieties in Pn ....................... 32 3.5 Serre's Tor-formula . 36 4 Appendix 42 4.1 Homogeneous Noether normalization . 42 4.2 Primes associated to a graded module . 43 1 Chapter 1 Introduction The topic of this thesis is Bézout's theorem. The classical version considers the number of points in the intersection of two algebraic plane curves. It states that if we have two algebraic plane curves, dened over an algebraically closed eld and cut out by multi- variate polynomials of degrees n and m, then the number of points where these curves intersect is exactly nm if we count multiple intersections and intersections at innity. In Chapter 2 we dene the necessary terminology to state this theorem rigorously, give an elementary proof for the upper bound using resultants, and later prove the full Bézout's theorem. A very modest background should suce for understanding this chapter, for example the course Algebra II given at the University of Helsinki should cover most, if not all, of the prerequisites. In Chapter 3, we generalize Bézout's theorem to higher dimensional projective spaces. -

Chapter 1 Geometry of Plane Curves
Chapter 1 Geometry of Plane Curves Definition 1 A (parametrized) curve in Rn is a piece-wise differentiable func- tion α :(a, b) Rn. If I is any other subset of R, α : I Rn is a curve provided that α→extends to a piece-wise differentiable function→ on some open interval (a, b) I. The trace of a curve α is the set of points α ((a, b)) Rn. ⊃ ⊂ AsubsetS Rn is parametrized by α if and only if there exists set I R ⊂ ⊆ such that α : I Rn is a curve for which α (I)=S. A one-to-one parame- trization α assigns→ and orientation toacurveC thought of as the direction of increasing parameter, i.e., if s<t,the direction of increasing parameter runs from α (s) to α (t) . AsubsetS Rn may be parametrized in many ways. ⊂ Example 2 Consider the circle C : x2 + y2 =1and let ω>0. The curve 2π α : 0, R2 given by ω → ¡ ¤ α(t)=(cosωt, sin ωt) . is a parametrization of C for each choice of ω R. Recall that the velocity and acceleration are respectively given by ∈ α0 (t)=( ω sin ωt, ω cos ωt) − and α00 (t)= ω2 cos 2πωt, ω2 sin 2πωt = ω2α(t). − − − The speed is given by ¡ ¢ 2 2 v(t)= α0(t) = ( ω sin ωt) +(ω cos ωt) = ω. (1.1) k k − q 1 2 CHAPTER 1. GEOMETRY OF PLANE CURVES The various parametrizations obtained by varying ω change the velocity, ac- 2π celeration and speed but have the same trace, i.e., α 0, ω = C for each ω. -

Combination of Cubic and Quartic Plane Curve
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728,p-ISSN: 2319-765X, Volume 6, Issue 2 (Mar. - Apr. 2013), PP 43-53 www.iosrjournals.org Combination of Cubic and Quartic Plane Curve C.Dayanithi Research Scholar, Cmj University, Megalaya Abstract The set of complex eigenvalues of unistochastic matrices of order three forms a deltoid. A cross-section of the set of unistochastic matrices of order three forms a deltoid. The set of possible traces of unitary matrices belonging to the group SU(3) forms a deltoid. The intersection of two deltoids parametrizes a family of Complex Hadamard matrices of order six. The set of all Simson lines of given triangle, form an envelope in the shape of a deltoid. This is known as the Steiner deltoid or Steiner's hypocycloid after Jakob Steiner who described the shape and symmetry of the curve in 1856. The envelope of the area bisectors of a triangle is a deltoid (in the broader sense defined above) with vertices at the midpoints of the medians. The sides of the deltoid are arcs of hyperbolas that are asymptotic to the triangle's sides. I. Introduction Various combinations of coefficients in the above equation give rise to various important families of curves as listed below. 1. Bicorn curve 2. Klein quartic 3. Bullet-nose curve 4. Lemniscate of Bernoulli 5. Cartesian oval 6. Lemniscate of Gerono 7. Cassini oval 8. Lüroth quartic 9. Deltoid curve 10. Spiric section 11. Hippopede 12. Toric section 13. Kampyle of Eudoxus 14. Trott curve II. Bicorn curve In geometry, the bicorn, also known as a cocked hat curve due to its resemblance to a bicorne, is a rational quartic curve defined by the equation It has two cusps and is symmetric about the y-axis. -
![TWO FAMILIES of STABLE BUNDLES with the SAME SPECTRUM Nonreduced [M]](https://docslib.b-cdn.net/cover/3812/two-families-of-stable-bundles-with-the-same-spectrum-nonreduced-m-953812.webp)
TWO FAMILIES of STABLE BUNDLES with the SAME SPECTRUM Nonreduced [M]
proceedings of the american mathematical society Volume 109, Number 3, July 1990 TWO FAMILIES OF STABLE BUNDLES WITH THE SAME SPECTRUM A. P. RAO (Communicated by Louis J. Ratliff, Jr.) Abstract. We study stable rank two algebraic vector bundles on P and show that the family of bundles with fixed Chern classes and spectrum may have more than one irreducible component. We also produce a component where the generic bundle has a monad with ghost terms which cannot be deformed away. In the last century, Halphen and M. Noether attempted to classify smooth algebraic curves in P . They proceeded with the invariants d , g , the degree and genus, and worked their way up to d = 20. As the invariants grew larger, the number of components of the parameter space grew as well. Recent work of Gruson and Peskine has settled the question of which invariant pairs (d, g) are admissible. For a fixed pair (d, g), the question of determining the number of components of the parameter space is still intractable. For some values of (d, g) (for example [E-l], if d > g + 3) there is only one component. For other values, one may find many components including components which are nonreduced [M]. More recently, similar questions have been asked about algebraic vector bun- dles of rank two on P . We will restrict our attention to stable bundles a? with first Chern class c, = 0 (and second Chern class c2 = n, so that « is a positive integer and i? has no global sections). To study these, we have the invariants n, the a-invariant (which is equal to dim//"'(P , f(-2)) mod 2) and the spectrum. -

Geometry of Algebraic Curves
Geometry of Algebraic Curves Fall 2011 Course taught by Joe Harris Notes by Atanas Atanasov One Oxford Street, Cambridge, MA 02138 E-mail address: [email protected] Contents Lecture 1. September 2, 2011 6 Lecture 2. September 7, 2011 10 2.1. Riemann surfaces associated to a polynomial 10 2.2. The degree of KX and Riemann-Hurwitz 13 2.3. Maps into projective space 15 2.4. An amusing fact 16 Lecture 3. September 9, 2011 17 3.1. Embedding Riemann surfaces in projective space 17 3.2. Geometric Riemann-Roch 17 3.3. Adjunction 18 Lecture 4. September 12, 2011 21 4.1. A change of viewpoint 21 4.2. The Brill-Noether problem 21 Lecture 5. September 16, 2011 25 5.1. Remark on a homework problem 25 5.2. Abel's Theorem 25 5.3. Examples and applications 27 Lecture 6. September 21, 2011 30 6.1. The canonical divisor on a smooth plane curve 30 6.2. More general divisors on smooth plane curves 31 6.3. The canonical divisor on a nodal plane curve 32 6.4. More general divisors on nodal plane curves 33 Lecture 7. September 23, 2011 35 7.1. More on divisors 35 7.2. Riemann-Roch, finally 36 7.3. Fun applications 37 7.4. Sheaf cohomology 37 Lecture 8. September 28, 2011 40 8.1. Examples of low genus 40 8.2. Hyperelliptic curves 40 8.3. Low genus examples 42 Lecture 9. September 30, 2011 44 9.1. Automorphisms of genus 0 an 1 curves 44 9.2. -

Bézout's Theorem
Bézout’s Theorem Jennifer Li Department of Mathematics University of Massachusetts Amherst, MA ¡ No common components How many intersection points are there? Motivation f (x,y) g(x,y) Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 2 / 80 How many intersection points are there? Motivation f (x,y) ¡ No common components g(x,y) Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 2 / 80 Motivation f (x,y) ¡ No common components g(x,y) How many intersection points are there? Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 2 / 80 Algebra Geometry { set of solutions } { intersection points of curves } Motivation f (x,y) = 0 g(x,y) = 0 Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 3 / 80 Geometry { intersection points of curves } Motivation f (x,y) = 0 g(x,y) = 0 Algebra { set of solutions } Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 3 / 80 Motivation f (x,y) = 0 g(x,y) = 0 Algebra Geometry { set of solutions } { intersection points of curves } Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 3 / 80 Motivation f (x,y) = 0 g(x,y) = 0 How many intersections are there? Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 4 / 80 Motivation f (x,y) = 0 g(x,y) = 0 How many intersections are there? Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 5 / 80 Motivation f (x,y) = 0 g(x,y) = 0 How many intersections are there? Jennifer Li (University of Massachusetts) Bézout’s Theorem November 30, 2016 6 / 80 f (x): polynomial in one variable 2 n f (x) = a0 + a1x + a2x +⋯+ anx Example. -

1.3 Curvature and Plane Curves
1.3. CURVATURE AND PLANE CURVES 7 1.3 Curvature and Plane Curves We want to be able to associate to a curve a function that measures how much the curve bends at each point. Let α:(a, b) R2 be a curve parameterized by arclength. Now, in the Euclidean plane any three non-collinear→ points lie on a unique circle, centered at the orthocenter of the triangle defined by the three points. For s (a, b) choose s1, s2, and s3 near s so that α(s1), α(s2), and α(s3) are non- ∈ collinear. This is possible as long as α is not linear near α(s). Let C = C(s1, s2, s3) be the center of the circle through α(s1), α(s2), and α(s3). The radius of this circle is approximately α(s) C . A better function to consider is the square of the radius: | − | ρ(s) = (α(s) C) (α(s) C). − · − Since α is smooth, so is ρ. Now, α(s1), α(s2), and α(s3) lie on the circle so ρ(s1) = ρ(s2) = ρ(s3). By Rolle’s Theorem there are points t1 (s1, s2) and t2 (s2, s3) so that ∈ ∈ ρ0(t1) = ρ0(t2) = 0. Then, using Rolle’s Theorem again on these points, there is a point u (t1, t2) so that ρ (u) = 0. Using Leibnitz’ Rule we have ρ (s) = 2α (s) (α(s) C) and ∈ 00 0 0 · − ρ00(s) = 2[α00(s) (α(s) C) + α0(s) α0(s)]. · − · Since ρ00(u) = 0, we get α00(u) (α(u) C) = α0(s) α(s) = 1. -

Global Properties of Plane and Space Curves
GLOBAL PROPERTIES OF PLANE AND SPACE CURVES KEVIN YAN Abstract. The purpose of this paper is purely expository. Its goal is to explain basic differential geometry to a general audience without assuming any knowledge beyond multivariable calculus. As a result, much of this paper is spent explaining intuition behind certain concepts rather than diving deep into mathematical jargon. A reader coming in with a stronger mathematical background is welcome to skip some of the more wordy segments. Naturally, to make the scope of the paper more manageable, we focus on the most basic objects in differential geometry, curves. Contents 1. Introduction 1 2. Preliminaries 2 2.1. What is a Curve? 2 2.2. Basic Local Properties 3 3. Plane Curves 5 3.1. Curvature 5 3.2. Basic Global Properties 7 3.3. Rotation Index and Winding Number 7 3.4. The Jordan Curve Theorem 8 3.5. The Four-Vertex Theorem 10 4. Space Curves 15 4.1. Curvature, Torsion, and the Frenet Frame 16 4.2. Total Curvature and Global Theorems 18 4.3. Knots and the Fary-Milnor Theorem 23 5. Acknowledgements 26 6. References 26 1. Introduction A key element of this paper is the distinction between local and global properties of curves. Roughly speaking, local properties refer to small parts of the curve, and global properties refer to the curve as a whole. Examples of local properties include regularity, curvature, and torsion, all of which can be defined at an individual point. The global properties we reference include theorems like the Jordan Curve Theorem, Fenchel's Theorem, and the Fary- Milnor Theorem. -

THE HESSE PENCIL of PLANE CUBIC CURVES 1. Introduction In
THE HESSE PENCIL OF PLANE CUBIC CURVES MICHELA ARTEBANI AND IGOR DOLGACHEV Abstract. This is a survey of the classical geometry of the Hesse configuration of 12 lines in the projective plane related to inflection points of a plane cubic curve. We also study two K3surfaceswithPicardnumber20whicharise naturally in connection with the configuration. 1. Introduction In this paper we discuss some old and new results about the widely known Hesse configuration of 9 points and 12 lines in the projective plane P2(k): each point lies on 4 lines and each line contains 3 points, giving an abstract configuration (123, 94). Through most of the paper we will assume that k is the field of complex numbers C although the configuration can be defined over any field containing three cubic roots of unity. The Hesse configuration can be realized by the 9 inflection points of a nonsingular projective plane curve of degree 3. This discovery is attributed to Colin Maclaurin (1698-1746) (see [46], p. 384), however the configuration is named after Otto Hesse who was the first to study its properties in [24], [25]1. In particular, he proved that the nine inflection points of a plane cubic curve form one orbit with respect to the projective group of the plane and can be taken as common inflection points of a pencil of cubic curves generated by the curve and its Hessian curve. In appropriate projective coordinates the Hesse pencil is given by the equation (1) λ(x3 + y3 + z3)+µxyz =0. The pencil was classically known as the syzygetic pencil 2 of cubic curves (see [9], p. -
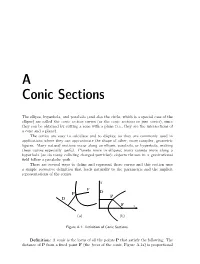
A Conic Sections
A Conic Sections The ellipse, hyperbola, and parabola (and also the circle, which is a special case of the ellipse) are called the conic section curves (or the conic sections or just conics), since they can be obtained by cutting a cone with a plane (i.e., they are the intersections of a cone and a plane). The conics are easy to calculate and to display, so they are commonly used in applications where they can approximate the shape of other, more complex, geometric figures. Many natural motions occur along an ellipse, parabola, or hyperbola, making these curves especially useful. Planets move in ellipses; many comets move along a hyperbola (as do many colliding charged particles); objects thrown in a gravitational field follow a parabolic path. There are several ways to define and represent these curves and this section uses asimplegeometric definition that leads naturally to the parametric and the implicit representations of the conics. y F P D P D F x (a) (b) Figure A.1: Definition of Conic Sections. Definition: A conic is the locus of all the points P that satisfy the following: The distance of P from a fixed point F (the focus of the conic, Figure A.1a) is proportional 364 A. Conic Sections to its distance from a fixed line D (the directrix). Using set notation, we can write Conic = {P|PF = ePD}, where e is the eccentricity of the conic. It is easy to classify conics by means of their eccentricity: =1, parabola, e = < 1, ellipse (the circle is the special case e = 0), > 1, hyperbola. -

Algebraic Plane Curves Deposited by the Faculty of Graduate Studies and Research
PLUCKER'3 : NUMBERS: ALGEBRAIC PLANE CURVES DEPOSITED BY THE FACULTY OF GRADUATE STUDIES AND RESEARCH Iw • \TS • \t£S ACC. NO UNACC.'»"1928 PLITCOR'S FOOTERS IE THE THEORY 0? ALGEBRAIC PLAITS CURVES A Thesis presented in partial fulfilment for the degree of -Master of Arts, Department of Mathematics. April 28, 1928. by ALICiD WI1LARD TURIIPP. Acknowledgment Any commendation which this thesis may merit, is in large measure due to Dr. C..T. Sullivan, Peter Re&path Professor of Pure Mathematics; and I take this opportunity to express my indebtedness to him. April 25, 1928. I IT D A :: IITTPODIICTIOI? SECTIOH I. • pp.l-S4 Algebraic Curve defined. Intersection of two curves. Singular points on curves. Conditions for multiple points. Conditions determining an n-ic. Maximum number of double points. Examples. SECTION II ...... pp.25-39 Class of curve. Tangerfcial equations. Polar reciprocation. Singularities on a curve and its reciprocal. Superlinear branches, with application to intersections of two curves at singular points. Examples. 3SCTI0IT III pp.40-52 Polar Curves. Intersections of Curve and Pirst Polar. Hessian.Intersections of Hessian and Curve. Examples. 3ECTI0TT IV . .................. pp.52-69 Pliicker's numbers and Equations for simple singularities. Deficiency. Unicursal Curves. Classification of cubies and quartics. Extension of Plucker's relations to k-ple points with distinct tangents, and to ordinary superlinear branch points. Short discussion of Higher Singularities. Examples. I PhTJCPEirS PTE.3EE3 IE PEE EHSOHY CF ALGEBRAIC Ph-TITE CUPYE3. IPPEODUCPIOH Pith the advent of the nineteenth century,a new era dawned in the progress of analytic geometry. The appearance of poiiceletTs, "Traite des proprietes project ives des figures", in 1822, really initiated modern geometry. -

RETURN of the PLANE EVOLUTE 1. Short Historical Account As We
RETURN OF THE PLANE EVOLUTE RAGNI PIENE, CORDIAN RIENER, AND BORIS SHAPIRO “If I have seen further it is by standing on the shoulders of Giants.” Isaac Newton, from a letter to Robert Hooke Abstract. Below we consider the evolutes of plane real-algebraic curves and discuss some of their complex and real-algebraic properties. In particular, for a given degree d 2, we provide ≥ lower bounds for the following four numerical invariants: 1) the maximal number of times a real line can intersect the evolute of a real-algebraic curve of degree d;2)themaximalnumberofreal cusps which can occur on the evolute of a real-algebraic curve of degree d;3)themaximalnumber of (cru)nodes which can occur on the dual curve to the evolute of a real-algebraic curve of degree d;4)themaximalnumberof(cru)nodeswhichcanoccurontheevoluteofareal-algebraiccurve of degree d. 1. Short historical account As we usually tell our students in calculus classes, the evolute of a curve in the Euclidean plane is the locus of its centers of curvature. The following intriguing information about evolutes can be found on Wikipedia [35]: “Apollonius (c. 200 BC) discussed evolutes in Book V of his treatise Conics. However, Huygens is sometimes credited with being the first to study them, see [17]. Huygens formulated his theory of evolutes sometime around 1659 to help solve the problem of finding the tautochrone curve, which in turn helped him construct an isochronous pendulum. This was because the tautochrone curve is a cycloid, and cycloids have the unique property that their evolute is a cycloid of the same type.