Maemo Diablo Reference Manual for Maemo 4.1 (DRAFT)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Location-Based Mashups for Nokia Internet Tablets
Institute of Parallel and Distributed Systems Universität Stuttgart Universitätsstraße 38 D–70569 Stuttgart Diplomarbeit Nr. 2579 Location-based Mashups for Nokia Internet Tablets Andreas Brodt Course of Study: Software Engineering Examiner: Prof. Dr.-Ing. habil. Bernhard Mitschang Supervisor: Dr. rer. nat. Daniela Nicklas Commenced: February 5, 2007 Completed: August 7, 2007 CR-Classification: H.2.5, H.5.1, H.5.4 Abstract Location-based services have gained large impact in the last years. Also, meanwhile small and powerful end-user devices are present and available. At the same time, so-called mashup pages are spreading on the web. Mashups integrate content from existing sources into a new presentation. With the appearance of web-based map APIs, such as Google Maps, it has become easy to create mapping mashups, which present geographically annotated data on a map. Giving such a mapping mashup the possibility to utilize the user’s position would make the mashup location-aware and provide additional user value. This thesis explores how the user’s position can be integrated into a mashup. Different approaches to achieve this are examined. An architecture for a system enabling location-based mashups is developed. The architecture integrates the user’s position into mashups by extending the web browser. The Delivery Context Interfaces (DCI) are used as standardized interface for providing mashups with the user’s position. Mashups are created on the user’s device by a JavaScript client. Adaptation to the various data formats of the data sources is done by wrappers on the server side which convert the data into a uniform format. -
Mobile Linux Mojo the XYZ of Mobile Tlas PDQ!
Mobile Linux Mojo The XYZ of Mobile TLAs PDQ! Bill Weinberg January 29, 2009 Copyright © 2009 Bill Weinberg, LinuxPundit,com Alphabet Soup . Too many TLAs – Non-profits – Commercial Entities – Tool Kits – Standards . ORG Typology – Standards Bodies – Implementation Consortia – Hybrids MIPS and Open Source Copyright © 2008 Bill Weinberg, LinuxPundit,com Page: 2 The Big Four . Ahem, Now Three . OHA - Open Handset Alliance – Founded by Google, together with Sprint, TIM, Motorola, et al. – Performs/support development of Android platform . LiMo Foundation – Orig. Motorola, NEC, NTT, Panasonic, Samsung, Vodaphone – Goal of created shared, open middleware mobile OS . LiPS - Linux Phone Standards Forum – Founded by France Telecom/Orange, ACCESS et al. – Worked to create standards for Linux-based telephony m/w – Merged with LiMo Foundation in June 2008 . Moblin - Mobile Linux – Founded by Intel, (initially) targeting Intel Atom CPUs – Platform / distribution to support MIDs, Nettops, UMPC MIPS and Open Source Copyright © 2008 Bill Weinberg, LinuxPundit,com Page: 3 LiMo and Android . Android is a complete mobile stack LiMo is a platform for enabling that includes applications applications and services Android, as Free Software, should LiMo membership represents appeal to Tier II/III OEMs and Tier I OEMs, ISVs and operators ODMs, who lack resources LiMo aims to leave Android strives to be “room for differentiation” a stylish phone stack LiMo presents Linux-native APIs Android is based on Dalvik, a Java work-alike The LiMo SDK has/will have compliance test suites OHA has a “non Fragmentation” pledge MIPS and Open Source Copyright © 2008 Bill Weinberg, LinuxPundit,com Page: 4 And a whole lot more . -
Android (Operating System) 1 Android (Operating System)
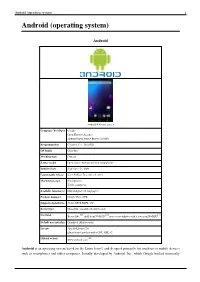
Android (operating system) 1 Android (operating system) Android Android 4.4 home screen Company / developer Google Open Handset Alliance Android Open Source Project (AOSP) Programmed in C (core), C++, Java (UI) OS family Unix-like Working state Current Source model Open source with proprietary components Initial release September 23, 2008 Latest stable release 4.4.2 KitKat / December 9, 2013 Marketing target Smartphones Tablet computers Available language(s) Multi-lingual (46 languages) Package manager Google Play, APK Supported platforms 32-bit ARM, MIPS, x86 Kernel type Monolithic (modified Linux kernel) [1] [2] [3] Userland Bionic libc, shell from NetBSD, native core utilities with a few from NetBSD Default user interface Graphical (Multi-touch) License Apache License 2.0 Linux kernel patches under GNU GPL v2 [4] Official website www.android.com Android is an operating system based on the Linux kernel, and designed primarily for touchscreen mobile devices such as smartphones and tablet computers. Initially developed by Android, Inc., which Google backed financially Android (operating system) 2 and later bought in 2005, Android was unveiled in 2007 along with the founding of the Open Handset Alliance: a consortium of hardware, software, and telecommunication companies devoted to advancing open standards for mobile devices. The first publicly available smartphone running Android, the HTC Dream, was released on October 22, 2008. The user interface of Android is based on direct manipulation, using touch inputs that loosely correspond to real-world actions, like swiping, tapping, pinching and reverse pinching to manipulate on-screen objects. Internal hardware such as accelerometers, gyroscopes and proximity sensors are used by some applications to respond to additional user actions, for example adjusting the screen from portrait to landscape depending on how the device is oriented. -

SDK Developer Reference Manual
SDK Developer Reference Manual Version 1.0 13 Aout 2019 Mobiyo Pôle Produit 94 Rue de Villiers 92832 Levallois Perret Cedex – France SAS au capital de 2 486 196€, RCS Paris 824 638 209, N° TVA Intracommunautaire : FR61 824 638 209, Code APE : 6201Z i TABLE OF CONTENTS Table of contents Overview ������������������������������������������������������������������������������������������������� 1 What is the Mobiyo SDK . .1 What is an SDK ? �������������������������������������������������������������������������������������������������������������������������������������������������������1 What is a REST Web Service? �������������������������������������������������������������������������������������������������������������������������������1 Who may use this SDK? ����������������������������������������������������������������������������������������������2 Knowledge and skills . 2 How to read this documentation? . 2 Starting Guide �������������������������������������������������������������������������������������� 3 Basic Concept ����������������������������������������������������������������������������������������������������������������3 Requests . 3 Responses ����������������������������������������������������������������������������������������������������������������������������������������������������������������� 4 Character encoding ����������������������������������������������������������������������������������������������������������������������������������������������� 5 Dates . 5 Available formats ��������������������������������������������������������������������������������������������������������� -
State of Mobile Linux Juha-Matti Liukkonen, Jan 5, 2011
State of Mobile Linux Juha-Matti Liukkonen, Jan 5, 2011 1 Contents • Why is this interesting in a Qt course? • Mobile devices vs. desktop/server systems • Android, Maemo, and MeeGo today • Designing software for mobile environments 2 Why is this interesting in a Qt course? 3 Rationale • Advances in technology make computers mobile • Low-power processors, displays, wireless network chipsets, … iSuppli, Dec 2008 • Laptops outsell desktop computers • High-end smartphones = mobile computers Nokia terminology • Need to know how to make software function well in a mobile device • Qt is big part of Symbian & Maemo/MeeGo API 4 Developing software for mobiles In desktop/server computing: • Android smartphones Java :== server C/C++ :== desktop • Eclipse, Java Qt was initially developed for desktop applications. • Symbian smartphones Mobile devices today are more powerful than the • NetBeans / Eclipse, Java ME desktops 10 years ago. • Qt Creator, C/C++ Of particular interest in this course. • Maemo / MeeGo smartphones • Qt Creator, C/C++ 5 The elephant in the room • In 2007, Apple change the mobile world with the iPhone • Touch user interface, excellent developer tools, seamless services integration, … • Modern operating system, shared with iPod and Mac product lines • Caught “industry regulars” with their pants down • Nokia, Google, Samsung, et al – what choice do they have? Linux! We don’t talk about the iPhone here. 6 iPad “killed the netbook” • In 2010, Apple introduced another mobile game changer • iPad = basically, a scaled-up iPhone with a -

Emerging Technologies Mobile-Computing Trends: Lighter, Faster, Smarter
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by ScholarSpace at University of Hawai'i at Manoa Language Learning & Technology October 2008, Volume 12, Number 3 http://llt.msu.edu/vol12num3/emerging/ pp. 3-9 EMERGING TECHNOLOGIES MOBILE-COMPUTING TRENDS: LIGHTER, FASTER, SMARTER Robert Godwin-Jones Virginia Commonwealth University We are moving into a new era of mobile computing, one that promises greater variety in applications, highly improved usability, and speedier networking. The 3G iPhone from Apple is the poster child for this trend, but there are plenty of other developments that point in this direction. The Google-led Android phone will make its appearance this year, offering a compelling open-source alternative to Apple's device. New, faster networking, particularly WiMax, is rolling out, allowing these devices connection speeds that approach wired broadband. This will also benefit the new crop of ultra-light laptops. The significant innovation in this area is the famous $100 XO computer (now $188; all prices are USD). Previous surveys, in LLT, and by researchers (PDF) at the UK's Open University, have highlighted recent projects in mobile assisted language learning. In this column I will be focusing primarily on the changing computing and networking environment and what it might portend for future language learning applications. ULTRA-MOBILE PCs When I last wrote a column dedicated to mobile computing, nearly 10 years ago, there were few lightweight laptops, and the existing models all had major drawbacks. Today there are many more models and sizes available, but not all the shortcomings have been addressed. -

Oracle® Solaris 11.2 Desktop 管理员指南
® Oracle Solaris 11.2 Desktop 管理员指南 文件号码 E54056 2014 年 7 月 版权所有 © 2012, 2014, Oracle 和/或其附属公司。保留所有权利。 本软件和相关文档是根据许可证协议提供的,该许可证协议中规定了关于使用和公开本软件和相关文档的各种限制,并受知识产权法的保护。除非在许可证协议中明 确许可或适用法律明确授权,否则不得以任何形式、任何方式使用、拷贝、复制、翻译、广播、修改、授权、传播、分发、展示、执行、发布或显示本软件和相关文 档的任何部分。除非法律要求实现互操作,否则严禁对本软件进行逆向工程设计、反汇编或反编译。 此文档所含信息可能随时被修改,恕不另行通知,我们不保证该信息没有错误。如果贵方发现任何问题,请书面通知我们。 如果将本软件或相关文档交付给美国政府,或者交付给以美国政府名义获得许可证的任何机构,必须符合以下规定: U.S. GOVERNMENT END USERS: Oracle programs, including any operating system, integrated software, any programs installed on the hardware, and/or documentation, delivered to U.S. Government end users are "commercial computer software" pursuant to the applicable Federal Acquisition Regulation and agency- specific supplemental regulations. As such, use, duplication, disclosure, modification, and adaptation of the programs, including any operating system, integrated software, any programs installed on the hardware, and/or documentation, shall be subject to license terms and license restrictions applicable to the programs. No other rights are granted to the U.S. Government. 本软件或硬件是为了在各种信息管理应用领域内的一般使用而开发的。它不应被应用于任何存在危险或潜在危险的应用领域,也不是为此而开发的,其中包括可能会 产生人身伤害的应用领域。如果在危险应用领域内使用本软件或硬件,贵方应负责采取所有适当的防范措施,包括备份、冗余和其它确保安全使用本软件或硬件的措 施。对于因在危险应用领域内使用本软件或硬件所造成的一切损失或损害,Oracle Corporation 及其附属公司概不负责。 Oracle 和 Java 是 Oracle 和/或其附属公司的注册商标。其他名称可能是各自所有者的商标。 Intel 和 Intel Xeon 是 Intel Corporation 的商标或注册商标。所有 SPARC 商标均是 SPARC International, Inc 的商标或注册商标,并应按照许可证的规定使 用。AMD、Opteron、AMD 徽标以及 AMD Opteron 徽标是 Advanced Micro Devices 的商标或注册商标。UNIX 是 The Open Group 的注册商标。 本软件或硬件以及文档可能提供了访问第三方内容、产品和服务的方式或有关这些内容、产品和服务的信息。对于第三方内容、产品和服务,Oracle -

Project Proposal Service Architecture for Multimedia Based Communication
Seite 1/8 Project Proposal Service Architecture for Multimedia Based Communication Dipl.-Ing. Eva Brucherseifer Dipl.-Ing. Stefan Eilers 02/01/06 Contents 1.The Situation......................................................................................................................... ...............2 2.The Vision............................................................................................................................... .............2 3.Related Projects...................................................................................................................... .............4 3.1.Telepathy..................................................................................................................................... 4 3.2.MOTUIM/DesktopIntegrationSIPIM .................................................................................... ..........4 3.3.KCall.......................................................................................................................................... ..4 3.4.OpenTAPI Prototype..................................................................................... ................................5 4.OpenCDI Project: Description and Bias........................................................................ .........................5 4.1.Roadmap................................................................................................. .....................................6 5.License.......................................................................................................... -

Hildon 2.2: the Hildon Toolkit for Fremantle
Hildon 2.2: the Hildon toolkit for Fremantle Maemo Summit 2009 – Westergasfabriek Amsterdam Alberto Garcia [email protected] Claudio Saavedra [email protected] Introduction Hildon widgets library ● Set of widgets built on top of GTK+ ● Created for Nokia devices based on the Maemo platform: – Nokia 770 – Nokia N800 – Nokia N810 – Nokia N900 ● Released under the GNU LGPL ● Used also in other projects (e.g Ubuntu Mobile) Maemo 5 - Fremantle ● Maemo release for the Nokia N900 ● Modern, usable and finger-friendly UI ● Completely revamped user interface, very different from all previous versions ● Hildon 2.2.0 released on 24 September 2009 Hildon 2.0: Modest http://www.flickr.com/photos/yerga/ / CC BY-NC 2.0 Hildon 2.0: Modest http://www.flickr.com/photos/yerga/ / CC BY-NC 2.0 Hildon 2.2: Modest Hildon 2.2: Modest Hildon source lines of code ● Hildon 1.0 (16 Apr 2007): 23,026 ● Hildon 2.0 (10 Oct 2007): 23,690 ● Hildon 2.2.0 (24 Sep 2009): 36,291 Hildon 2.2: the Fremantle release ● Applications as window stacked views ● Buttons as central UI part ● Scrollable widgets are touchable-friendly ● Kinetic scrolling (HildonPannableArea) Other goals ● New and old-style applications can coexist ● Maintain backward compatibility – No API breakage – UI style preserved (where possible) MathJinni in Fremantle New UI concepts Window stacks ● Hierarchical organization of windows ● Applications have a main view from which different subviews can be opened ● Views: implemented with HildonStackableWindow ● Stacks: implemented with HildonWindowStack Demo HildonButton: -

Solaris Express Developer Edition
Новые функции и возможности в Solaris Express Developer Edition Beta Sun Microsystems, Inc. 4150 Network Circle Santa Clara, CA 95054 U.S.A. Номер по каталогу: 820–2601–03 Январь 2008 © 2008 Sun Microsystems, Inc. 4150 Network Circle, Santa Clara, CA 95054 U.S.A. Все права защищены. Sun Microsystems, Inc. обладает правами на интеллектуальную собственность в отношении технологий, реализованных в рассматриваемом в настоящем документе продукте. В частности и без ограничений, эти права на интеллектуальную собственность могут включать в себя один или более патентов США или заявок на патент в США и в других странах. Права Правительства США – Коммерческое программное обеспечение. К правительственным пользователям относится стандартное лицензионное соглашение Sun Microsystems, Inc, а также применимые положения FAR с приложениями. В этот продукт могут входить материалы, разработанные третьими сторонами. Отдельные части продукта могут быть заимствованы из систем Berkeley BSD, предоставляемых по лицензии университета штата Калифорния. UNIX является товарным знаком, зарегистрированным в США и других странах, и предоставляется по лицензии исключительно компанией X/Open Company, Ltd. Sun, Sun Microsystems, логотип Sun, логотип Solaris, логотип Java Coffee Cup, docs.sun.com, Java и Solaris являются товарными знаками или зарегистрированными товарными знаками Sun Microsystems, Inc. в США и других странах. Все товарные знаки SPARC используются по лицензии и являются товарными знаками или зарегистрированными товарными знаками SPARC International, Inc. в США и других странах. Продукты, носящие торговые знаки SPARC, основаны на архитектуре, разработанной Sun Microsystems, Inc. Adobe – зарегистрированный товарный знак Adobe Systems, Incorporated. Графический интерфейс пользователя OPEN LOOK и SunTM был разработан компанией Sun Microsystems, Inc. для ее пользователей и лицензиатов. Компания Sun признает, что компания Xerox первой начала исследования и разработку концепции визуального или графического интерфейсов пользователя для компьютерной индустрии. -

Oracle® Solaris 11.1데스크탑관리자
Oracle® Solaris 11.1 데스크탑 관리자 설명서 부품 번호: E36695–02 2013년 2월 Copyright © 2012, 2013, Oracle and/or its affiliates. All rights reserved. 본 소프트웨어와 관련 문서는 사용 제한 및 기밀 유지 규정을 포함하는 라이센스 계약서에 의거해 제공되며, 지적 재산법에 의해 보호됩니다. 라이센스 계약서 상에 명시적으로 허용되어 있는 경우나 법규에 의해 허용된 경우를 제외하고, 어떠한 부분도 복사, 재생, 번역, 방송, 수정, 라이센스, 전송, 배포, 진열, 실행, 발행, 또는 전시될 수 없습니다. 본 소프트웨어를 리버스 엔지니어링, 디스어셈블리 또는 디컴파일하는 것은 상호 운용에 대한 법규에 의해 명시된 경우를 제외하고는 금지되어 있습니다. 이 안의 내용은 사전 공지 없이 변경될 수 있으며 오류가 존재하지 않음을 보증하지 않습니다. 만일 오류를 발견하면 서면으로 통지해 주기 바랍니다. 만일 본 소프트웨어나 관련 문서를 미국 정부나 또는 미국 정부를 대신하여 라이센스한 개인이나 법인에게 배송하는 경우, 다음 공지 사항이 적용됩니다. U.S. GOVERNMENT END USERS: Oracle programs, including any operating system, integrated software, any programs installed on the hardware, and/or documentation, delivered to U.S. Government end users are "commercial computer software" pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, use, duplication, disclosure, modification, and adaptation of the programs, including any operating system, integrated software, any programs installed on the hardware, and/or documentation, shall be subject to license terms and license restrictions applicable to the programs. No other rights are granted to the U.S. Government. 본 소프트웨어 혹은 하드웨어는 다양한 정보 관리 애플리케이션의 일반적인 사용을 목적으로 개발되었습니다. 본 소프트웨어 혹은 하드웨어는 개인적인 상해를 초래할 수 있는 애플리케이션을 포함한 본질적으로 위험한 애플리케이션에서 사용할 목적으로 개발되거나 그 용도로 사용될 수 없습니다. 만일 본 소프트웨어 혹은 하드웨어를 위험한 애플리케이션에서 사용할 경우, 라이센스 사용자는 해당 애플리케이션의 안전한 사용을 위해 모든 적절한 비상-안전, 백업, 대비 및 기타 조치를 반드시 취해야 합니다. -

Yocto Project Reference Manual Is for the 1.6.3 Release of the Yocto Project
Richard Purdie, Linux Foundation <[email protected]> by Richard Purdie Copyright © 2010-2015 Linux Foundation Permission is granted to copy, distribute and/or modify this document under the terms of the Creative Commons Attribution-Share Alike 2.0 UK: England & Wales [http://creativecommons.org/licenses/by-sa/2.0/uk/] as published by Creative Commons. Manual Notes • This version of the Yocto Project Reference Manual is for the 1.6.3 release of the Yocto Project. To be sure you have the latest version of the manual for this release, go to the Yocto Project documentation page [http://www.yoctoproject.org/documentation] and select the manual from that site. Manuals from the site are more up-to-date than manuals derived from the Yocto Project released TAR files. • If you located this manual through a web search, the version of the manual might not be the one you want (e.g. the search might have returned a manual much older than the Yocto Project version with which you are working). You can see all Yocto Project major releases by visiting the Releases [https://wiki.yoctoproject.org/wiki/Releases] page. If you need a version of this manual for a different Yocto Project release, visit the Yocto Project documentation page [http://www.yoctoproject.org/ documentation] and select the manual set by using the "ACTIVE RELEASES DOCUMENTATION" or "DOCUMENTS ARCHIVE" pull-down menus. • To report any inaccuracies or problems with this manual, send an email to the Yocto Project discussion group at [email protected] or log into the freenode #yocto channel.