Smarter Simulation Placement of Kilonova Light Curve Models for Computationally Inexpensive Surrogate Model Creation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Kilonovae and Short Hard Bursts A.K.A: Electromagnetic Counterparts to Gravitational Waves
Kilonovae and short hard bursts a.k.a: electromagnetic counterparts to gravitational waves Igor Andreoni for the Multi-Messenger Astronomy working group ZTF Phase II: NSF reverse site visit November 19th 2020 Electromagnetic counterparts to gravitational waves Short hard GRB - Are neutron star mergers the dominant sites for heavy element nucleosynthesis? - What extreme Physics can we learn? Kilonova (optical/IR) - How can we use kilonovae for cosmology? - What is the rate of binary neutron Gravitational star and neutron star-black hole mergers? Waves Image credit: NASA November 19th 2020 Igor Andreoni Finding kilonovae is challenging! Kilonovae are rare, fast and faint transients compared to supernovae Faint Fast modified from Andreoni+2018, LSST White Paper November 19th 2020 Igor Andreoni Why do we need ZTF? During the second LIGO-Virgo observing run (O2), the binary neutron star merger GW170817 was localized to 32 deg2 GW170817 (a couple of ZTF pointings) During O3 (2019-2020), the median localization for neutron star mergers was 4,480 deg2! …and the sources were more distant November 19th 2020 Igor Andreoni Gravitational Wave follow-up during O3 We used ZTF to follow-up 15 GW triggers that included at least one neutron star Kilonova luminosity function Kasliwal et al., ApJ, in press Second binary NS merger follow-up Coughlin et al., ApJ Letters, Vol 885, Issue 1, article id. L19, 13 pp. Constraints on NS-BH merger Anand & Coughlin et al., Nature Astronomy, in press November 19th 2020 Igor Andreoni Short, hard gamma-ray bursts (GRBs) We used ZTF to follow-up 8 short GRBs found by the Fermi satellite Ahumada et al., in prep. -

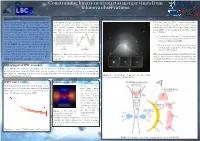
GW170817-Like Disk Produces a Blue Kilonova J
GW170817-Like Disk Produces a Blue Kilonova J. M. Miller, with: B. R. Ryan, J. C. Dolence, A. Burrows, C. L. Fryer, O. Korobkin, J. Lippuner, M. R. Mumpower, R. T. Wollaeger A Groundbreaking Discovery The Case For the Disk Nucleosynthesis Heat, neutrinos, and magnetic fields can drive a wind off On August 17, 2017, the in-spiral and I I We find structured outflow. I the disk. merger of two neutron stars was observed. I Polar material has high Ye and produces less-robust r-process. This wind may produce a less-robust r-process and be a This event is called GW170817. I I Midplane material has low Ye and produces more-robust r-process. source for the blue kilonova. I Events like this one drive short gamma ray I Structure persists in time! bursts, some of the most energetic events in I Depends on electron fraction Ye. Low Ye means robust the universe. r-process and implies a red kilonova. High means less robust r-process and implies a blue kilonova. I Mergers are sites of r-process Literature is sparse and divided on wind and r-process nucleosynthesis, where the heaviest elements Above: A spectrogram showing the I [3, 4, 5]. in our universe are formed. characteristic gravitational wave chirp due to Above: Volume rendering of a Result depends sensitively on complex interplay of I Many more events to come! GW170817. Image from [1]. I simulated accretion disk formed by a neutrino transport, general relativity, magnetic fields, and BNS merger. fluid dynamics. An In-Spiral Story Above: Left: Total mass in the outflow as a 4 4 Presenting νbhlight function of time. -

Brian David Metzger
Curriculum Vitae, Updated 10/20 Brian David Metzger Columbia University Email: [email protected] Department of Physics Web: http://www.columbia.edu/∼bdm2129 909 Pupin Hall, MC 5217 Phone: (212) 854-9702 New York, NY 10027 Fax: (212) 854-3379 ACADEMIC POSITIONS 07/20− Full Professor of Physics, Columbia University 07/19−07/20 Visiting Scholar, Simons Flatiron Institute 01/17−07/20 Associate Professor of Physics, Columbia University 01/13−01/17 Assistant Professor of Physics, Columbia University 09/12−12/12 Lyman Spitzer Jr. Fellow, Princeton University 09/09−12/12 NASA Einstein Fellow, Princeton University EDUCATION 08/03−05/09 University of California at Berkeley M.A. & Ph.D. in Physics (Thesis Adviser: Prof. Eliot Quataert) Dissertation: \Theoretical Models of Gamma-Ray Burst Central Engines" 08/99−05/03 The University of Iowa B.S. in Physics, Astronomy, & Mathematics (Highest Distinction) SELECT HONORS, FELLOWSHIPS and AWARDS 2020 Blavatnik National Laureate in Natural Sciences & Engineering 2020 Simons Investigator in Mathematics and Theoretical Physics 2019 Simons Fellow in Mathematics and Theoretical Physics 2019 2020 Decadal Survey in Astronomy & Astrophysics, Program Panelist 2019 Salpeter Honorary Lecturer, Cornell 2019 Bruno Rossi Prize, American Astronomical Society 2018,19,20 Blavatnik National Awards for Young Scientists, Finalist 2019 New Horizons Breakthrough Prize in Physics 2018 Charles and Thomas Lauritsen Honorary Lecture, Caltech 2016 Scialog Fellow, Research Science Corporation 2014 Alfred P. Sloan Research Fellowship 2009−12 NASA Einstein Fellowship, Princeton 2009 Dissertation Prize, AAS High Energy Astrophysics Division 2009 NASA Hubble Fellowship 2009 Lyman Spitzer Jr. Fellowship, Princeton 2009 Mary Elizabeth Uhl Prize, UC Berkeley Astronomy 2005−08 NASA Graduate Student Research Fellowship 2003 James A. -

Optical Emission from a Kilonova Following a Gravitational-Wave-Detected Neutron-Star Merger
Optical emission from a kilonova following a gravitational-wave-detected neutron-star merger Iair Arcavi1,2, Griffin Hosseinzadeh1,2, D. Andrew Howell1,2, Curtis McCully1,2, Dovi Poznanski3, Daniel Kasen4,5, Jennifer Barnes6, Michael Zaltzman3, 1,2 3 7 Sergiy Vasylyev , Dan Maoz and Stefano Valenti 1Department of Physics, University of California, Santa Barbara, CA 93106-9530, USA 2Las Cumbres Observatory, 6740 Cortona Dr Ste 102, Goleta, CA 93117-5575, USA 3School of Physics and Astronomy, Tel Aviv University, Tel Aviv 69978, Israel 4Nuclear Science Division, Lawrence Berkeley National Laboratory, Berkeley, CA 94720- 8169, USA 5Departments of Physics and Astronomy, University of California, Berkeley, CA 94720- 7300, USA 6Columbia Astrophysics Laboratory, Columbia University, New York, NY, 10027, USA 7Department of Physics, University of California, 1 Shields Ave, Davis, CA 95616-5270, USA The merger of two neutron stars has been predicted to produce an optical- infrared transient (lasting a few days) known as a ‘kilonova’, powered by the radioactive decay of neutron-rich species synthesized in the merger1-5. Evidence that short γ-ray bursts also arise from neutron star mergers has been accumulating6-8. In models2,9 of such mergers a small amount of mass (10−4-10−2 solar masses) with a low electron fraction is ejected at high velocities (0.1-0.3 times light speed) and/or carried out by winds from an accretion disk formed around the newly merged object10,11. This mass is expected to undergo rapid neutron capture (r-process) nucleosynthesis, leading to the formation of radioactive elements that release energy as they decay, powering an electromagnetic transient1-3,9-14. -
![Arxiv:2009.12255V2 [Astro-Ph.HE] 9 Jan 2021](https://docslib.b-cdn.net/cover/7011/arxiv-2009-12255v2-astro-ph-he-9-jan-2021-1877011.webp)
Arxiv:2009.12255V2 [Astro-Ph.HE] 9 Jan 2021
Mergers of binary neutron star systems: a multi-messenger revolution Elena Pian1,∗ 1INAF, Astrophysics and Space Science Observatory Correspondence*: Via Piero Gobetti 101, 40129 Bologna, Italy [email protected] ABSTRACT On 17 August 2017, less than two years after the direct detection of gravitational radiation from the merger of two ∼30 M⊙ black holes, a binary neutron star merger was identified as the source of a gravitational wave signal of ∼100 s duration that occurred at less than 50 Mpc from Earth. A short GRB was independently identified in the same sky area by the Fermi and INTEGRAL satellites for high energy astrophysics, which turned out to be associated with the gravitational event. Prompt follow-up observations at all wavelengths led first to the detection of an optical and infrared source located in the spheroidal galaxy NGC4993 and, with a delay of ∼10 days, to the detection of radio and X-ray signals. This paper revisits these observations and focusses on the early optical/infrared source, which was thermal in nature and powered by the radioactive decay of the unstable isotopes of elements synthesized via rapid neutron capture during the merger and in the phases immediately following it. The far-reaching consequences of this event for cosmic nucleosynthesis and for the history of heavy elements formation in the Universe are also illustrated. Keywords: neutron star, gravitational waves, gamma-ray burst, nucleosynthesis, r-process, kilonova 1 INTRODUCTION Although the birth of ”multi-messenger” astronomy dates back to the detection of the first solar neutrinos in the ’60s and was rejuvenated by the report of MeV neutrinos from SN1987A in the Large Magellanic Cloud, the detection of gravitational radiation from the binary neutron star merger on 17 August 2017 (GW170817A) marks the transition to maturity of this approach to observational astrophysics, as it is expected to open an effective window into the study of astrophysical sources that is not limited to exceptionally close (the Sun) or rare (Galactic supernova) events. -

Using Machine Learning for Transient Classification in Searches For
Draft version June 15, 2020 Typeset using LATEX twocolumn style in AASTeX62 Using machine learning for transient classification in searches for gravitational-wave counterparts Cosmin Stachie,1 Michael W. Coughlin,2, 3 Nelson Christensen,1 and Daniel Muthukrishna4 1Artemis, Universit´eC^oted'Azur, Observatoire C^oted'Azur, CNRS, CS 34229, F-06304 Nice Cedex 4, France 2Division of Physics, Math, and Astronomy, California Institute of Technology, Pasadena, CA 91125, USA 3School of Physics and Astronomy, University of Minnesota, Minneapolis, Minnesota 55455, USA 4Institute of Astronomy, University of Cambridge, Madingley Road, Cambridge CB3 0HA, UK ABSTRACT The large sky localization regions offered by the gravitational-wave interferometers require efficient follow-up of the many counterpart candidates identified by the wide field-of-view telescopes. Given the restricted telescope time, the creation of prioritized lists of the many identified candidates becomes mandatory. Towards this end, we use astrorapid, a multi-band photometric lightcurve classifier, to differentiate between kilonovae, supernovae, and other possible transients. We demonstrate our method on the photometric observations of real events. In addtion, the classification performance is tested on simulated lightcurves, both ideally and realistically sampled. We show that after only a few days of observations of an astronomical object, it is possible to rule out candidates as supernovae and other known transients. Keywords: gravitational waves 1. INTRODUCTION electromagnetic signatures -

Overview: Kilonova 1
Overview: Kilonova 1. Basics 2. Prospects for EM observa-ons 3. Signatures of r-process nucleosynthesis Masaomi Tanaka (Na-onal Astronomical Observatory of Japan) References (Reviews) • RosswoG, S. 2015 “The mul*-messenger picture of compact binary mergers” Interna*onal Journal of Modern Physics D, 24, 1530012-52 • Fernandez, R. & MetzGer, B. D. 2016 “Electromagne*c Signatures of Neutron Star Mergers in the Advanced LIGO Era” Annual Review of Nuclear and Par*cle Science, 66, 23 • Tanaka, M. 2016 “Kilonova/Macronova Emission from Compact Binary Mergers” Advances in Astronomy, 634197 • MetzGer, B. D. 2017 “Kilonovae” Living Reviews in Rela*vity, 20, 3 Timeline r-process Radioac-ve decay MerGer nucleosynthesis => kilonova Dynamical Wind < 10 ms ~< 100 ms < 1 sec ~ days energy deposi-on Diffusing out Masaru’s talk Francois’s talk My talk (Thursday) (Monday) (today) ν-driven winds from NS merger remnants 3145 5 Downloaded from http://mnras.oxfordjournals.org/ MerGer => see Masaru’s talkFigure 12. Vertical slices of the 3D domain (corresponding to the y 0 plane), recorded 20 ms after the beginning of the simulation. In the left-hand panel, 3 = we represent the logarithm of the matter density (in g cm− , left-hand side) and the projected fluid velocity (in units of c,ontheright-handside);thearrows indicate the direction of the projected velocity in the plane. On the right-hand panel, we represent the electron fraction (left-hand side) and the matter entropy 1 Dynamical ejecta (~< 10 ms)(in unit of kB baryon− ,right-handside). Post-dynamical ejecta (~< 100 ms) Side view at National Astronomical Observatory of Japan on January 1, 2016 Side view Top view Sekiguchi+16 Perego+14 Figure 13. -

Gabriel Martínez-Pinedo Kilonova
Kilonova: An electromagnetic signal of heavy element nucleosynthesis Gabriel Martínez-Pinedo Colloquia Severo Ochoa, IFIC, Valencia, May 10, 2018 G. Martínez-Pinedo / Kilonova: Electromagnetic signature of the r process Signatures of nucleosynthesis Neutron capture processes: s process r process • Heavy elements produced in neutron capture processes • r process operates at early Galactic history Metal-poor stars observations 2 G. Martínez-Pinedo / Kilonova: Electromagnetic signature of the r process Implications from observations Individual stars, Milky Way Halo Sneden, Cowan & Gallino, 2008 Ji et al 2016 found that only 1 of 10 ultrafaint dwarf galaxies is enriched in r-process elements R process related to rare high yield events not correlated with Iron enrichment Similar results obtained by 60Fe and 244Pu observations in deep sea sediments (Wallner et al, 2015; Hotokezaka et al, 2015) 3 G. Martínez-Pinedo / Kilonova: Electromagnetic signature of the r process R process nuclear needs Astrophysical environment should provide enough neutrons per seed for the r process to operate 퐴final = 퐴initial + 푛seed nseed depends mainly on neutron richness ejecta requires properties of exotic neutron-rich nuclei: • Nuclear masses • Beta-decay rates • Neutron capture rates • Fission rates and yields 4 G. Martínez-Pinedo / Kilonova: Electromagnetic signature of the r process Astrophysical sites Core-collapse supernova Compact binary mergers Stephan Rosswog 푌푒 Supernova Mergers Optimal conditions Yield / Frequency Direct signature 5 G. Martínez-Pinedo / Kilonova: Electromagnetic signature of the r process Supernova nucleosynthesis Heavy elements produced in neutrino winds from protoneutron star cooling. Neutrino interactions determine proton- to-nucleon ratio, 푌푒 − 휈푒 + 푛 ⇄ 푝 + 푒 + 휈푒 + 푝 ⇄ 푛 + 푒 Supernova produce only medium mass nuclei GMP, et al., JPG 41, 044008 (2014) 6 G. -
L. E. H. Datrier, M. Hendry, G. Woan Introduction EM Triggered GW
Constraining binary neutron star merger times from kilonova observations L. E. H. Datrier, M. Hendry, G. Woan Introduction Gaussian Processes Kilonovae The detection of the binary neutron star merger A Gaussian process is defined as a collection of Kilonovae are the faint, mostly isotropically (BNS) GW170817 and its electromagnetic (EM) random variables, any finite number of which emitting, long-lived optical and infrared tran- counterparts marked the first joint gravitational have a joint Gaussian distribution. Gaussian sients associated with the merger of two neutron wave-electromagnetic observations. The use processes are used to infer directly in function stars (BNS) or of a neutron star with a black of gravitational wave triggers is the most promising space, by describing a distribution over functions. hole (NSBH). strategy for detecting more kilonovae (KNe), the faint optical transient associated with binary neu- • Promising candidates for the electromag- tron star and neutron star-black hole (NSBH) merg- netic follow-up of gravitational wave obser- ers. However, new generations of optical telescopes vations of BNS and NSBH. like the LSST are expected to make serendipitous • New generations of telescopes will unveil observations of kilonovae. We use KN models in- populations of kilonovae both with and terpolated through Gaussian process regression to without GW triggers. constrain kilonova parameters from incomplete light curves. We focus on recovering the merger time Figure 3: Functions drawn from GP prior (a) and The ejected neutron-rich matter in kilonovae un- of the BNS, and consider the prospects for EM- posterior (b) i.e. prior conditioned by 5 noiseless data dergoes rapid neutron capture (r-process) nu- triggered gravitational wave searches. -

Review Article Kilonova/Macronova Emission from Compact Binary Mergers
Hindawi Publishing Corporation Advances in Astronomy Volume 2016, Article ID 6341974, 12 pages http://dx.doi.org/10.1155/2016/6341974 Review Article Kilonova/Macronova Emission from Compact Binary Mergers Masaomi Tanaka National Astronomical Observatory of Japan, Mitaka, Tokyo 181-8588, Japan Correspondence should be addressed to Masaomi Tanaka; [email protected] Received 11 March 2016; Accepted 16 May 2016 Academic Editor: WeiKang Zheng Copyright © 2016 Masaomi Tanaka. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. We review current understanding of kilonova/macronova emission from compact binary mergers (mergers of two neutron stars or a neutron star and a black hole). Kilonova/macronova is emission powered by radioactive decays of -process nuclei and it is one of the most promising electromagnetic counterparts of gravitational wave sources. Emission from the dynamical ejecta of ∼0.01⊙ 40 41 −1 is likely to have a luminosity of ∼10 –10 erg s with a characteristic timescale of about 1 week. The spectral peak is located in red optical or near-infrared wavelengths. A subsequent accretion disk wind may provide an additional luminosity or an earlier/bluer emission if it is not absorbed by the precedent dynamical ejecta. The detection of near-infrared excess in short GRB 130603B and possible optical excess in GRB 060614 supports the concept of the kilonova/macronova scenario. At 200 Mpc distance, a typical peak brightness of kilonova/macronova with 0.01⊙ ejecta is about 22 mag and the emission rapidly fades to >24 mag within ∼10 days. -
Why Machine Learning?
Searching for Kilonovae with Machine Learning Techniques Beth Pater Mentor: Jim Annis What is a kilonova? A kilonova is the result of neutron star mergers. This explosion will send a ripple of gravitational waves and produce heavy elements such as gold and platinum. To understand the frequency: ● A supernova occurs once per galaxy per century ● A kilonova occurs once per galaxy per 100 centuries https://kilonova.org/index.html Can you spot the kilonova? https://www.darkenergysurvey.org/news/scientists-spot-explosive-counterpart-ligovirgos-latest-gravitational-waves/ Can we train a machine to The challenge determine if a new image has a kilonova without using traditional difference imaging techniques? Why Machine Learning? “Machine learning works best on problems that humans do subconsciously” Google Developers ML Crash Course There are several compelling reasons to consider machine learning over difference imaging... https://kilonova.org/press.html The hypothesis: The best machine learning approach to this problem will be a convolutional neural net The Experiment: Observe 100 galaxies every 3 nights for 3 months and analyze the new images for a kilonova Why a CNN? A convolutional neural network is a type of machine learning inspired by the biological makeup of the neurons in the visual cortex. It works well with 2D data - which is a benefit when using image data. Big Ideas: Let’s take a look ● Prepare the images at the notebook ● Train/Test CNN ● Analyze the process Gathering Images The notebook: https://colab.research.google.com/drive/1uuz_nb0djS4qKo1rsWa2DauT7EhYhbQn#scrollTo=UdFp TGYb5fs4 ● Analyze the images that the computer got wrong ● Try to use the images with Next Steps different machine learning designs: random forest, CNN with LSTM, etc. -
Gravitational-Wave and Multi-Messenger Astronomy
Gravitational-wave and multi-messenger astronomy Koutarou Kyutoku Department of Physics, Kyoto University 2019/8/19 Strings and Fields 2019 1 Contents 1. Introduction 2. Binary black hole merger 3. Binary neutron star merger 4. Future prospect 5. Summary 2019/8/19 Strings and Fields 2019 2 1. Introduction 2019/8/19 Strings and Fields 2019 3 Gravitational-wave detector network http://gwcenter.icrr.u-tokyo.ac.jp/wp-content/themes/lcgt/images/img_abt_lcgt.jpg KAGRA (Kamioka, Japan) under development… Advanced LIGO (Hanford, USA) another at Livingston https://www.advancedligo.mit.edu/graphics/summary01.jpg Advanced Virgo (Pisa, Italy) http://virgopisa.df.unipi.it/sites/virgopisa.df.unipi.it.virgopisa/files/banner/virgo.jpg 2019/8/19 Strings and Fields 2019 4 The first event: GW150914 Merger of two black holes http://apod.nasa.gov/apod/ap160211.html 2019/8/19 Strings and Fields 2019 5 What we learned from GW150914 • Masses of individual stars are measured - even at 400Mpc (Milky way is only ~10kpc) • The luminosity distance is measured directly 1Mpc ~ 3 million light years ~ 3 x 10^24 cm Obtained from the luminosity distance using Planck cosmology … not important 2019/8/19 Strings and Fields 2019 LIGO&Virgo (2016) 6 Toward multi-messenger astronomy strong / opaque Strong interaction: (strong but short-range) Electromagnetic interaction: electromagnetic waves Signals are strong but also hidden very easily Weak interaction: neutrino Another interesting messenger, particle physics Gravitational interaction: gravitational waves Signals are weak