CAPTURING SMALL ASTEROIDS INTO SUN-EARTH LAGRANGIAN POINTS for MINING PURPOSES Neus Llado´∗, Yuan Ren†, Josep J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![Arxiv:1406.5253V1 [Astro-Ph.EP] 20 Jun 2014](https://docslib.b-cdn.net/cover/7421/arxiv-1406-5253v1-astro-ph-ep-20-jun-2014-817421.webp)
Arxiv:1406.5253V1 [Astro-Ph.EP] 20 Jun 2014
Physical Properties of Near-Earth Asteroid 2011 MD M. Mommert Department of Physics and Astronomy, Northern Arizona University, PO Box 6010, Flagstaff, AZ 86011, USA D. Farnocchia Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109, USA J. L. Hora Harvard-Smithsonian Center for Astrophysics, 60 Garden Street, MS 65, Cambridge, MA 02138-1516, USA S. R. Chesley Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109, USA D. E. Trilling Department of Physics and Astronomy, Northern Arizona University, PO Box 6010, Flagstaff, AZ 86011, USA P. W. Chodas Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109, USA arXiv:1406.5253v1 [astro-ph.EP] 20 Jun 2014 M. Mueller SRON Netherlands Institute for Space Research, Postbus 800, 9700 AV, Groningen, The Netherlands A. W. Harris DLR Institute of Planetary Research, Rutherfordstrasse 2, 12489 Berlin, Germany H. A. Smith –2– Harvard-Smithsonian Center for Astrophysics, 60 Garden Street, MS 65, Cambridge, MA 02138-1516, USA and G. G. Fazio Harvard-Smithsonian Center for Astrophysics, 60 Garden Street, MS 65, Cambridge, MA 02138-1516, USA Received ; accepted accepted by ApJL –3– ABSTRACT We report on observations of near-Earth asteroid 2011 MD with the Spitzer Space Telescope. We have spent 19.9 h of observing time with channel 2 (4.5 µm) of the Infrared Array Camera and detected the target within the 2σ positional uncertainty ellipse. Using an asteroid thermophysical model and a model of non- gravitational forces acting upon the object we constrain the physical properties of 2011 MD, based on the measured flux density and available astrometry data. -

Detecting the Yarkovsky Effect Among Near-Earth Asteroids From
Detecting the Yarkovsky effect among near-Earth asteroids from astrometric data Alessio Del Vignaa,b, Laura Faggiolid, Andrea Milania, Federica Spotoc, Davide Farnocchiae, Benoit Carryf aDipartimento di Matematica, Universit`adi Pisa, Largo Bruno Pontecorvo 5, Pisa, Italy bSpace Dynamics Services s.r.l., via Mario Giuntini, Navacchio di Cascina, Pisa, Italy cIMCCE, Observatoire de Paris, PSL Research University, CNRS, Sorbonne Universits, UPMC Univ. Paris 06, Univ. Lille, 77 av. Denfert-Rochereau F-75014 Paris, France dESA SSA-NEO Coordination Centre, Largo Galileo Galilei, 1, 00044 Frascati (RM), Italy eJet Propulsion Laboratory/California Institute of Technology, 4800 Oak Grove Drive, Pasadena, 91109 CA, USA fUniversit´eCˆote d’Azur, Observatoire de la Cˆote d’Azur, CNRS, Laboratoire Lagrange, Boulevard de l’Observatoire, Nice, France Abstract We present an updated set of near-Earth asteroids with a Yarkovsky-related semi- major axis drift detected from the orbital fit to the astrometry. We find 87 reliable detections after filtering for the signal-to-noise ratio of the Yarkovsky drift esti- mate and making sure the estimate is compatible with the physical properties of the analyzed object. Furthermore, we find a list of 24 marginally significant detec- tions, for which future astrometry could result in a Yarkovsky detection. A further outcome of the filtering procedure is a list of detections that we consider spurious because unrealistic or not explicable with the Yarkovsky effect. Among the smallest asteroids of our sample, we determined four detections of solar radiation pressure, in addition to the Yarkovsky effect. As the data volume increases in the near fu- ture, our goal is to develop methods to generate very long lists of asteroids with reliably detected Yarkovsky effect, with limited amounts of case by case specific adjustments. -

Actafutura Fax: +31 71 565 8018
Acta Futura Issue 8 GTOC5: results and methods Advanced Concepts Team http://www.esa.int/act Publication: Acta Futura, Issue 8 (2014) Editor-in-chief: Duncan James Barker Associate editors: Dario Izzo Jose M. Llorens Montolio Pacôme Delva Francesco Biscani Camilla Pandolfi Guido de Croon Luís F. Simões Daniel Hennes Editorial assistant: Zivile Dalikaite Published and distributed by: Advanced Concepts Team ESTEC, European Space Research and Technology Centre 2201 AZ, Noordwijk The Netherlands www.esa.int/actafutura Fax: +31 71 565 8018 Cover image: solution submitted by The University of Texas at Austin team ISSN: 2309-1940 D.O.I.:10.2420/ACT-BOK-AF Copyright ©2014- ESA Advanced Concepts Team Typeset with X TE EX Contents Foreword to the special issue on the GTOC5 competition 7 Dario Izzo and Luís F. Simões GTOC5: Problem statement and notes on solution verification 9 Ilia S. Grigoriev and Maxim P. Zapletin GTOC5: Results from the Jet Propulsion Laboratory 21 Anastassios E. Petropoulos, Eugene P. Bonfiglio, Daniel J. Grebow, Try Lam, Jeffrey S. Parker, Juan Arrieta, Damon F. Landau, Rodney L. Anderson, Eric D. Gustafson, Gregory J. Whiffen, Paul A. Finlayson, Jon A. Sims GTOC5: Results from the Politecnico di Torino and Università di Roma Sapienza 29 Lorenzo Casalino, Dario Pastrone, Francesco Simeoni, Guido Colasurdo and Alessandro Zavoli GTOC5: Results from the Tsinghua University 37 Fanghua Jiang, Yang Chen, Yuechong Liu, Hexi Baoyin and Junfeng Li GTOC5: Results from the European Space Agency and University of Florence 45 Dario Izzo, Luís F. Simões, Chit Hong Yam, Francesco Biscani, David Di Lorenzo, Bernardetta Addis and Andrea Cassioli GTOC5: Results from the National University of Defense Technology 57 Xiao-yong Jiang, Zong-fu Luo, Yi-jun Lian and G.Tang 5 6 Acta Futura 8 (2014) 7-8 Acta DOI: 10.2420/AF08.2014.7 Futura Foreword to the special issue on the GTOC5 competition Dario Izzo ,* Luís F. -

Why Atens Enjoy Enhanced Accessibility for Human Space Flight
(Preprint) AAS 11-449 WHY ATENS ENJOY ENHANCED ACCESSIBILITY FOR HUMAN SPACE FLIGHT Daniel R. Adamo* and Brent W. Barbee† Near-Earth objects can be grouped into multiple orbit classifications, among them being the Aten group, whose members have orbits crossing Earth's with semi-major axes less than 1 astronomical unit. Atens comprise well under 10% of known near-Earth objects. This is in dramatic contrast to results from recent human space flight near-Earth object accessibility studies, where the most favorable known destinations are typically almost 50% Atens. Geocentric dynamics explain this enhanced Aten accessibility and lead to an understanding of where the most accessible near-Earth objects reside. Without a com- prehensive space-based survey, however, highly accessible Atens will remain largely un- known. INTRODUCTION In the context of human space flight (HSF), the concept of near-Earth object (NEO) accessibility is highly subjective (Reference 1). Whether or not a particular NEO is accessible critically depends on mass, performance, and reliability of interplanetary HSF systems yet to be designed. Such systems would cer- tainly include propulsion and crew life support with adequate shielding from both solar flares and galactic cosmic radiation. Equally critical architecture options are relevant to NEO accessibility. These options are also far from being determined and include the number of launches supporting an HSF mission, together with whether consumables are to be pre-emplaced at the destination. Until the unknowns of HSF to NEOs come into clearer focus, the notion of relative accessibility is of great utility. Imagine a group of NEOs, each with nearly equal HSF merit determined from their individual characteristics relating to crew safety, scientific return, resource utilization, and planetary defense. -

Meteoroid Impacts Onto Asteroids: a Competitor for Yarkovsky and YORP
Meteoroid impacts onto asteroids: a competitor for Yarkovsky and YORP Paul A. Wiegert Dept. of Physics and Astronomy, The University of Western Ontario, London Ontario CANADA Submitted to Icarus July 14 2014 Abstract The impact of a meteoroid onto an asteroid transfers linear and angular mo- mentum to the larger body, which may affect its orbit and its rotational state. Here we show that the meteoroid environment of our Solar System can have an effect on small asteroids that is comparable to the Yarkovsky and Yarkovsky- O’Keefe-Radzievskii-Paddack (YORP) effects under certain conditions. The momentum content of the meteoroids themselves is expected to generate an effect much smaller than that of the Yarkovsky effect. However, momentum transport by ejecta may increase the net effective force by two orders of magni- tude for impacts into bare rock surfaces. This result is sensitive to the extrapola- tion of laboratory microcratering experiment results to real meteoroid-asteroid collisions and needs further study. If this extrapolation holds, then meteoroid impacts are more important to the dynamics of small asteroids than had previ- ously been considered. Asteroids orbiting on prograde orbits near the Earth encounter an anisotropic arXiv:1407.3714v1 [astro-ph.EP] 14 Jul 2014 meteoroid environment, including a population of particles on retrograde orbits generally accepted to be material from long-period comets spiralling inwards under Poynting-Robertson drag. High relative speed (60 km/s) impacts by me- teoroids provide a small effective drag force that decreases asteroid semimajor axes and which is independent of their rotation pole. This effect may exceed the instantaneous Yarkovsky drift at sizes near and below one meter. -
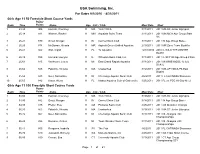
2010-2011 Top Age Group Times
USA Swimming, Inc. For Dates 9/1/2010 - 8/31/2011 Girls Age 11 50 Freestyle Short Course Yards Power Rank Time Points Name Age LSC / Club Meet Date Meet 1 24.88 906 Harnish, Courtney 11 MA York YMCA 3/11/2011 2011 MA SC Junior Olympics 2 25.18 881 Wittmer, Rachel 11 MN Aquajets Swim Team 3/11/2011 2011 MN MCA Age Group State Me 3 25.21 879 Grout, Morgan 11 IN Carmel Swim Club 3/18/2011 2011 IN Age Group State - 4 25.26 874 McGowan, Alessia 11 MR Asphalt Green Unified Aquatics 2/19/2011 2011 MR Zone Team Qualifier 5 25.41 862 Wall, Ingrid 11 FL T2 Aquatics 12/10/2010 2010 IL WILD TYR WINTER BLAST 6 25.49 855 Harvard, Laurynn 11 IL Wheaton Swim Club, Inc. 3/11/2011 2011 IL SCY ISI Age Group Cham 7 25.61 845 Vanhoven, Lexus 11 MI East Grand Rapids Aquatics 3/11/2011 2011 MI WMS/WOSC 12 & U STATE 8 25.62 845 Palochik, Victoria 11 MA Unattached 3/12/2011 2011 MA AP YMCA PA East District 9 25.64 843 Suer, Samantha 11 NI Chenango Aquatic Swim Club 4/6/2011 2011 FL CAT/NASA Showcase 10 25.65 842 Kraus, Alena 11 FL Makos Aquatics Club of Gainesville 3/26/2011 2011 FL vs. FGC All-Star Meet Girls Age 11 100 Freestyle Short Course Yards Power Rank Time Points Name Age LSC / Club Meet Date Meet 1 53.60 935 Harnish, Courtney 11 MA York YMCA 3/10/2011 2011 MA SC Junior Olympics 2 54.80 882 Grout, Morgan 11 IN Carmel Swim Club 3/18/2011 2011 IN Age Group State - 3 54.95 875 Pfeifer, Evie 11 OZ Parkway Swim Club 2/25/2011 2011 OZ Division I Champs 4 55.25 862 Palochik, Victoria 11 MA Unattached 3/10/2011 2011 MA SC Junior Olympics 5 55.26 862 Suer, Samantha 11 NI Chenango Aquatic Swim Club 3/17/2011 2011 NI - Niagara LSC Championships 6 55.40 856 Romano, Kristen 11 NI Town Wrecker Swim Team 3/17/2011 2011 NI - Niagara LSC Championships 7 55.41 855 Rongione, Isabella 11 PV The Fish 4/6/2011 2011 FL CAT/NASA Showcase 8 55.76 840 Joassaint, Britheny 11 GA Marietta Marlins, Inc 2/25/2011 2011 GA 14&U Short Course 9 55.80 839 Crouse, Eva 11 CT University Aquatic Club 3/10/2011 2011 CT Age Group Championship SCY Page 1 of 61 USA Swimming, Inc. -
Observation Campaign Status
Observation Campaign Status Paul Chodas (NEO Program Office) December 17, 2013 1 Observation Campaign Status • Discovery of NEOs continues at the same pace as in the last few years (~1000 per year). • Observation campaign discovery enhancements are in work but have not yet come online. – The DARPA Space Surveillance Telescope (SST) carried out NEO testing in this fall. More tests will be carried out in January, possibly leading to more regular operations starting in March. • Radar characterization of NEOs continues at a slightly faster pace than last year, due to higher priority for asteroids. • NEOWISE has been reactivated and is cooling down. The spacecraft will start surveying soon. • Three new ARM candidates for the Reference Mission were discovered in the last 6 months (2013 LE7, 2013 PZ6, 2013 XY20): – First two were too distant for radar characterization; the third was also distant but Arecibo will attempt to characterize it this week. – All three were too distant for ground-based IR characterization. • An attractive potential candidate was found for the Alternate Mission last month (2013 WA44), but it also was too distant for radar characterization. 2 Observation Campaign Enhancements for Discovery In Work or Potential Ops Facility V FOV lim (deg2) Improvements Date Catalina Sky Increase ML field of view 4x Late 2013 Survey: Mt. Bigelow 19.5 8 Increase MB FOV 2.5x Late 2014 Mt. Lemmon 21.5 1.2 Retune observation cadence Mid 2014 Increase NEO time to 50% Early 2014 Pan-STARRS 1 21.5 7 Current Surveys Increase NEO time to 100% Late 2014 DARPA SST 22+ 6 Additional NEO detection tests Early 2014 Palomar Transient Improve software to detect 21 7 Early 2014 Facility (PTF) streaked objects Pan-STARRS 2 22 7 Complete telescope system Late 2014 ATLAS 20 40 Entire night sky every night x2 Late 2015 FutureSurveys Vlim = limiting magnitude , FOV = Field of View 3 Nomenclature Guide • “Potential Candidate”: – Orbit parameters satisfy rough constraints on launch date, return date and total mission delta-v. -
Jjmonl 1612.Pmd
alactic Observer GJohn J. McCarthy Observatory Volume 9, No. 12 December 2016 Water - the elusive elixir of life in the cosmos - Is it even closer than we thought? The John J. McCarthy Observatory Galactic Observer New Milford High School Editorial Committee 388 Danbury Road Managing Editor New Milford, CT 06776 Bill Cloutier Phone/Voice: (860) 210-4117 Production & Design Phone/Fax: (860) 354-1595 www.mccarthyobservatory.org Allan Ostergren Website Development JJMO Staff Marc Polansky It is through their efforts that the McCarthy Observatory Technical Support has established itself as a significant educational and Bob Lambert recreational resource within the western Connecticut Dr. Parker Moreland community. Steve Allison Tom Heydenburg Steve Barone Jim Johnstone Colin Campbell Carly KleinStern Dennis Cartolano Bob Lambert Route Mike Chiarella Roger Moore Jeff Chodak Parker Moreland, PhD Bill Cloutier Allan Ostergren Doug Delisle Marc Polansky Cecilia Detrich Joe Privitera Dirk Feather Monty Robson Randy Fender Don Ross Randy Finden Gene Schilling John Gebauer Katie Shusdock Elaine Green Paul Woodell Tina Hartzell Amy Ziffer In This Issue "OUT THE WINDOW ON YOUR LEFT"............................... 3 COMMONLY USED TERMS .............................................. 17 TAURUS-LITTROW .......................................................... 3 EARTH-SUN LAGRANGE POINTS & JAMES WEBB TELESCOPE 17 OVER THE TOP ............................................................... 4 REFERENCES ON DISTANCES ........................................ -

Chodas-MFR Observations Releasable Final2.Pptx
Asteroid Redirect Robotic Mission (ARRM): Observation Campaign Study Paul Chodas, NASA NEO Program Office With assistance from: Lindley Johnson (HQ), Robert Jedicke and Eva Schunova (U. of Hawaii), Bob Gershman, Mike Hicks, Steve Chesley, Don Yeomans (JPL) Executive Summary • Current population models suggest that there are a large number of good ARRM candidate targets, but current surveys are finding only 2 to 3 per year, and only 4 of the known candidates can be adequately characterized (2009 BD, 2011 MD, 2013 EC20, 2008 HU4). • Discovery of good candidates is challenging, but the rate can be increased to at least 5 per year via near-term enhancements to current survey assets, as well as additional assets that can be online by 2015. • Enhancing surveys to find more ARRM candidates also increases their capabilities for finding potentially hazardous asteroids in general. • The discovery process alone is not sufficient to identify good candidates: physical characterization is also needed, particularly re size and mass. • Radar is a key characterization asset for ARRM candidates. • Rapid response is critical for physical characterization of newly discovered ARRM candidates. The process has been successfully exercised for a small candidate asteroid. Asteroid Redirect Mission • Mission Formulation Review • For Public Release 2 Numbers of Near-Earth Asteroids (NEAs) • 99% of Near-Earth Objects are asteroids (NEAs). • Current number of known NEAs: ~10,000, discovered at a rate of ~1000 per year. • Since 1998, NASA’s NEO Observation Program has led the international NEO discovery and characterization effort; this responsibility should continue in the search for smaller asteroids. • 95% of 1-km and larger NEAs have been found; the completion percentage drops for smaller asteroids because the population increases exponentially as size decreases. -

A Resonant Family of Dynamically Cold Small Bodies in the Near-Earth Asteroid Belt
MNRASL 434, L1–L5 (2013) doi:10.1093/mnrasl/slt062 Advance Access publication 2013 June 18 A resonant family of dynamically cold small bodies in the near-Earth asteroid belt C. de la Fuente Marcos‹ and R. de la Fuente Marcos Universidad Complutense de Madrid, Ciudad Universitaria, E-28040 Madrid, Spain Accepted 2013 May 13. Received 2013 May 10; in original form 2013 February 25 Downloaded from https://academic.oup.com/mnrasl/article/434/1/L1/1163370 by guest on 27 September 2021 ABSTRACT Near-Earth objects (NEOs) moving in resonant, Earth-like orbits are potentially important. On the positive side, they are the ideal targets for robotic and human low-cost sample return missions and a much cheaper alternative to using the Moon as an astronomical observatory. On the negative side and even if small in size (2–50 m), they have an enhanced probability of colliding with the Earth causing local but still significant property damage and loss of life. Here, we show that the recently discovered asteroid 2013 BS45 is an Earth co-orbital, the sixth horseshoe librator to our planet. In contrast with other Earth’s co-orbitals, its orbit is strikingly similar to that of the Earth yet at an absolute magnitude of 25.8, an artificial origin seems implausible. The study of the dynamics of 2013 BS45 coupled with the analysis of NEO data show that it is one of the largest and most stable members of a previously undiscussed dynamically cold group of small NEOs experiencing repeated trappings in the 1:1 commensurability with the Earth. -
Near-Earth Object Resource
NEO Resource Near-Earth Object Resource Compiled and edited by James M. Thomas for the Museum Astronomical Resource Society http://marsastro.org and the NASA/JPL Solar System Ambassador Program http://www.jpl.nasa.gov/ambassador Updated July 15, 2006 Based upon material available through the NASA Near-Earth Object Program http://neo.jpl.nasa.gov/ 1 of 104 NEO Resource Table of Contents Section Page Introduction & Overview 5 Target Earth 6 • The Cretaceous/Tertiary (K-T) Extinction 9 • Chicxulub Crater 10 • Barringer Meteorite Crater 13 What Are Near-Earth Objects (NEOs)? 14 What Is The Purpose Of The Near-Earth Object Program? 14 How Many Near-Earth Objects Have Been Discovered So Far? 15 What Is A PHA? 16 What Are Asteroids And Comets? 17 What Are The Differences Between An Asteroid, Comet, Meteoroid, Meteor and 19 Meteorite? Why Study Asteroids? 21 Why Study Comets? 24 What Are Atens, Apollos and Amors? 27 NEO Groups 28 Near-Earth Objects And Life On Earth 29 Near-Earth Objects As Future Resources 31 Near-Earth Object Discovery Teams 32 2 of 104 NEO Resource • Lincoln Near-Earth Asteroid Research (LINEAR) 35 • Near-Earth Asteroid Tracking (NEAT) 37 • Spacewatch 39 • Lowell Observatory Near-Earth Object Search (LONEOS) 41 • Catalina Sky Surveys 42 • Japanese Spaceguard Association (JSGA) 44 • Asiago DLR Asteroid Survey (ADAS) 45 Spacecraft Missions to Comets and Asteroids 46 • Overview 46 • Mission Summaries 49 • Near-Earth Asteroid Rendezvous (NEAR) 49 • DEEP IMPACT 49 • DEEP SPACE 1 50 • STARDUST 50 • Hayabusa (MUSES-C) 51 • ROSETTA -

2011-2012 Top Age Group Times
USA Swimming, Inc. For Dates 9/1/2011 - 8/31/2012 Girls Age 11 50 Freestyle Short Course Yards Power Rank Time Points Name Age LSC / Club Meet Date Meet 1 24.01 981 Merrell, Eva 11 CA Aquazot Swim Club 12/16/2011 2011 CA Winter CA NV Sectional 2 24.62 928 Wang, Vivian 11 PC SUNN Swimming 3/29/2012 2012 Far Western Championships 3 25.05 892 Joassaint, Britheny 11 GA Marietta Marlins, Inc 12/9/2011 2011 GA Georgia Short Course Senior Ch 4 25.17 882 Kolar, Julie 11 IL NASA Wildcat Aquatics 3/9/2012 2012 IL ISI Age Group Champion 5 25.34 868 Boyer, Elizabeth 11 CT Meriden Silver Fins 3/15/2012 2012 CT Age Group Champs SCY 6 25.36 866 Jahan, Sophie 11 CT YMCA Of Greenwich Marlins 3/15/2012 2012 CT Age Group Champs SCY 7 25.37 865 Weakley, Regan 11 SE Huntsville Swim Association 2/23/2012 2012 SE Southeastern Champions 8 25.41 862 Vitort, Lauren 11 CA Irvine Novaquatics 12/9/2011 2011 CA PSP - WAG Championship 9 25.46 858 Haschemeyer, Madison 11 IL Springfield USA 3/9/2012 2012 IL ISI Age Group Champion 10 25.52 853 Dang, Gabby 11 PN Wave Aquatics 3/30/2012 2012 PN NW Region Short Course AG Championships Girls Age 11 100 Freestyle Short Course Yards Power Rank Time Points Name Age LSC / Club Meet Date Meet 1 52.56 982 Merrell, Eva 11 CA Aquazot Swim Club 2/3/2012 2012 CA SCS SHORT COURSE JO CH 2 53.55 937 Joassaint, Britheny 11 GA Marietta Marlins, Inc 12/9/2011 2011 GA Georgia Short Course Senior Ch 3 54.29 904 Kolar, Julie 11 IL NASA Wildcat Aquatics 3/9/2012 2012 IL ISI Age Group Champion 4 54.83 881 Ruck, Taylor 11 AZ Scottsdale Aquatic