Kinetic and Vibration Analysis of Off-Road Bicycle Suspension Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Copake Auction Inc. PO BOX H - 266 Route 7A Copake, NY 12516
Copake Auction Inc. PO BOX H - 266 Route 7A Copake, NY 12516 Phone: 518-329-1142 December 1, 2012 Pedaling History Bicycle Museum Auction 12/1/2012 LOT # LOT # 1 19th c. Pierce Poster Framed 6 Royal Doulton Pitcher and Tumbler 19th c. Pierce Poster Framed. Site, 81" x 41". English Doulton Lambeth Pitcher 161, and "Niagara Lith. Co. Buffalo, NY 1898". Superb Royal-Doulton tumbler 1957. Estimate: 75.00 - condition, probably the best known example. 125.00 Estimate: 3,000.00 - 5,000.00 7 League Shaft Drive Chainless Bicycle 2 46" Springfield Roadster High Wheel Safety Bicycle C. 1895 League, first commercial chainless, C. 1889 46" Springfield Roadster high wheel rideable, very rare, replaced headbadge, grips safety. Rare, serial #2054, restored, rideable. and spokes. Estimate: 3,200.00 - 3,700.00 Estimate: 4,500.00 - 5,000.00 8 Wood Brothers Boneshaker Bicycle 3 50" Victor High Wheel Ordinary Bicycle C. 1869 Wood Brothers boneshaker, 596 C. 1888 50" Victor "Junior" high wheel, serial Broadway, NYC, acorn pedals, good rideable, #119, restored, rideable. Estimate: 1,600.00 - 37" x 31" diameter wheels. Estimate: 3,000.00 - 1,800.00 4,000.00 4 46" Gormully & Jeffrey High Wheel Ordinary Bicycle 9 Elliott Hickory Hard Tire Safety Bicycle C. 1886 46" Gormully & Jeffrey High Wheel C. 1891 Elliott Hickory model B. Restored and "Challenge", older restoration, incorrect step. rideable, 32" x 26" diameter wheels. Estimate: Estimate: 1,700.00 - 1,900.00 2,800.00 - 3,300.00 4a Gormully & Jeffery High Wheel Safety Bicycle 10 Columbia High Wheel Ordinary Bicycle C. -

Operating Manual Translation of the Original Instruction Manual
Operating manual Translation of the Original instruction manual Mountain bike Cross bike/ATB Dirt/street bike Single speed According to ISO 4210:2014 Breezer Bikes is a trademark of ASI Corp. www.advancedsports.com Pedelec/e-bike According to © ASI EN 15194 Dear Customer, To start with, we’d like to provide you with some important information Before riding your bicycle on public roads, you should inform yourself about your new bicycle. This will help you make the most of its benefits about the applicable national regulations in your specific country. and avoid any possible risks. Please read this instruction manual carefully Firstly, here are a few important pointers as to the rider’s person which and keep it for your future reference. are also very important: Your bicycle has been handed over to you fully assembled and adjusted. • Always wear a suitable bicycle helmet adjusted to fit If this is not the case, please contact your specialist retailer to ensure that your head and wear it for every ride! this important work is completed or make sure you carefully read the en- • Read the instructions supplied by your helmet manu- closed assembly instructions and follow all the directions given. facturer relating to fitting the helmet properly. It is assumed that users of this product have a basic and sufficient knowl- • Always wear bright clothing or sportswear with reflective edge of how to use bicycles. elements when you ride. If you are riding in difficult ter- rain, please wear suitable protective clothing, e.g. body Everyone that: protectors. • uses • Always wear tight clothing on your lower body, and trouser clips if required. -

Writing the Bicycle
Writing the Bicycle: Women, Rhetoric, and Technology in Late Nineteenth-Century America Sarah Overbaugh Hallenbeck A dissertation submitted to the faculty of the University of North Carolina at Chapel Hill in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of English and Comparative Literature. Chapel Hill 2009 Approved by: Jane Danielewicz Jordynn Jack Daniel Anderson Jane Thrailkill Beverly Taylor ABSTRACT Sarah Overbaugh Hallenbeck Writing the Bicycle: Women, Rhetoric, and Technology in Late Nineteenth-Century America (Under the direction of Jane Danielewicz and Jordynn Jack) This project examines the intersections among rhetoric, gender, and technology, examining in particular the ways that American women appropriated the new technology of the bicycle at the turn of the twentieth century. It asks: how are technologies shaped by discourse that emanates both from within and beyond professional boundaries? In what ways do technologies, in turn, reshape the social networks in which they emerge—making available new arguments and rendering others less persuasive? And to what extent are these arguments furthered by the changed conditions of embodiment and materiality that new technologies often initiate? Writing the Bicycle: Women, Rhetoric and Technology in Late Nineteenth- Century America addresses these questions by considering how women’s interactions with the bicycle allowed them to make new claims about their minds and bodies, and transformed the gender order in the process. The introduction, “Rhetoric, Gender, Technology,” provides an overview of the three broad conversations to which the project primarily contributes: science and technology studies, feminist historiography, and rhetorical theory. In addition, it outlines a “techno-feminist” materialist methodology that emphasizes the material ii and rhetorical agency of users in shaping technologies beyond their initial design and distribution phases. -

Mountain Bike Accessories for Trail Work
Part 1 of 3 United States Department of Agriculture MountainMountain BikeBike Forest Service Technology & Development AccessoriesAccessories forfor Program 2300 Recreation April 1998 TTrailrail WWorkork 9823-2812-MTDC Brian Vachowski, Project Leader 7E72A47–Accessories for Transporting Trail Maintenance Tools 1 Part 1 of 3 Contents Acknowledgments Part 1of 3 any people throughout the country who are not listed Introduction ___________________________ 3 here helped on this project with their comments and MM suggestions. I am especially grateful to the following The Situation at Seward _________________ 4 for their indepth contributions: Benefits of Bicycles ____________________ 5 Suzanne Hanlon, Adventure Cycling Association Not for Everyone _______________________ 6 Stephen Hmurciak, Seward Ranger District Panniers ______________________________ 7 Irene Lindquist, Seward Ranger District Chain Saw Carrier ______________________ 8 Kurt Loheit, International Mountain Bicycling Assn. Part 2 of 3 John Morris, Burley Design Cooperative Trailers ______________________________ 10 Sylvia Russell, Recreational Equipment, Inc. B.O.B. Yak Trailer _________________________ 10 B.O.B. Coz Trailer _________________________ 11 Wheele Pac Dog Trailer _____________________ 11 Keith Wolferman, Missoula Aerial Fire Depot Burley Design Cooperative’s Prototype _________ 11 Part 3 of 3 MTDC Staff: Bob Beckley, Windy Hayden, Bob Hensler, Product Sources and Organizations ______ 14 Gary Hoshide, Bert Lindler, and Sara Lustgraaf. About the Author______________________ 14 Appendix A—Job Hazard Analyses for Riding Mountain Bicycles and for Trailers _____________ 15 Appendix B—Kurt Loheit’s Tool Holder (Fits B.O.B. Yak Trailer) _______________________ 17 The Forest Service, United States Department of Agriculture, has developed this information for the guidance of its employees, its contractors, and its cooperating Federal and State agencies, and is not responsible for the interpretation or use of this information by anyone except its own employees. -

Safety Information
125367.PDF SAFETY INFORMATION HEADSHOK SOLO w/DL50 BiCYCLE ForK SUPPLEMENT ABOUT THIS SUPPLEMENT Please consult the Cannondale Solo Bicycle Fork Owner’s Manual Supplement for care and maintenance information Cannondale Owner’s Manual Supplements provide concerning the fork and front wheel removal and installation. important model specific safety, maintenance, and technical information. They are not replacements for your Cannondale Bicycle Owner’s Manual. REAR BRAKE ROTOR This supplement may be one of several for your bike. Be sure to obtain and read all of them. WARNING If you need a manual or supplement, or have a question KeeP yoUR HanDS anD fingers CLear of THE about your bike, please contact your Cannondale Dealer BraKE rotor anD CHainCase!! immediately, or call us at one of the telephone numbers listed on the back cover of this manual. You can download Adobe Acrobat PDF versions of any CHAINCASE HUB CAP Cannondale Owner’s Manuals or Supplements from our website: http://www.cannondale.com/bikes/tech. NOTICE • This manual is not a comprehensive safety or service DO not RIDE THIS BIKE WITH THE CHAINCASE HUB manual for your bike. CAP remoVED. Serious damage to the hub will result. See page 13. • This manual does not include assembly instructions for your bike. • All Cannondale bikes must be completely assembled and inspected for proper operation by a Cannondale Dealer before delivery to the owner. BICYCLE REPAIR / WORK STANDS The clamping jaws of a bike stand can generate a crushing WARNING force strong enough to seriously damage your frame. This supplement may include procedures beyond the NOTICE scope of general mechanical aptitude. -

Mountain Bike Performance and Recreation
sports and exercise medicine ISSN 2379-6391 http://dx.doi.org/10.17140/SEMOJ-SE-1-e001 Open Journal Special Edition “Mountain Bike Performance Mountain Bike Performance and and Recreation” Recreation Editorial Paul W. Macdermid, PhD* *Corresponding author Paul W. Macdermid, PhD Lecturer College of Health, School of Sport and Exercise, Massey University, Palmerston North, New College of Health Zealand School of Sport and Exercise Massey University Private Bag 11-222, Palmerston North 4474, New Zealand 1 The recreational activity of riding a bicyle off-road is very popular, and consequently Tel. +64 6 951 6824 2 E-mail: [email protected] a major contributor to tourism across the globe. As such the label accorded to the activity (“Mountain Biking (MTB)”), presents the image of an extreme sport. For many, this presents a Special Edition 1 picture of highly drilled and trained athletes performing gymnastic like tricks; hurtling down- Article Ref. #: 1000SEMOJSE1e001 hill at speeds >70 km/h (Downhill racing) or negotiating a short lap numerous times (Country Racing), to prove ascendancy over an opponent(s). For the majority of consumers/participants the French term “Velo Tout Terrain (VTT)” is a better decriptor and indicates the fact that the Article History bicycle is being purchased to ride on all terrain surfaces and profiles, by a diverse range of rd Received: August 23 , 2016 participants. Nevertheless, just like the world of motor car racing, technological development, rd Accepted: August 23 , 2016 physical understanding and skill development focuses on the very small percentage at the top of rd Published: August 23 , 2016 the pyramid in order to increase media exposure. -

Kewanee's Love Affair with the Bicycle
February 2020 Kewanee’s Love Affair with the Bicycle Our Hometown Embraced the Two-Wheel Mania Which Swept the Country in the 1880s In 1418, an Italian en- Across Europe, improvements were made. Be- gineer, Giovanni Fontana, ginning in the 1860s, advances included adding designed arguably the first pedals attached to the front wheel. These became the human-powered device, first human powered vehicles to be called “bicycles.” with four wheels and a (Some called them “boneshakers” for their rough loop of rope connected by ride!) gears. To add stability, others experimented with an Fast-forward to 1817, oversized front wheel. Called “penny-farthings,” when a German aristo- these vehicles became all the rage during the 1870s crat and inventor, Karl and early 1880s. As a result, the first bicycle clubs von Drais, created a and competitive races came into being. Adding to two-wheeled vehicle the popularity, in 1884, an Englishman named known by many Thomas Stevens garnered notoriety by riding a names, including Drais- bike on a trip around the globe. ienne, dandy horse, and Fontana’s design But the penny-farthing’s four-foot high hobby horse. saddle made it hazardous to ride and thus was Riders propelled Drais’ wooden, not practical for most riders. A sudden 50-pound frame by pushing stop could cause the vehicle’s mo- off the ground with their mentum to send it and the rider feet. It didn’t include a over the front wheel with the chain, brakes or pedals. But rider landing on his head, because of his invention, an event from which the Drais became widely ack- Believed to term “taking a header” nowledged as the father of the be Drais on originated. -

Rivendell Reader Index
Rivendell Reader Index 1 Sorry about the color. Never Again! The Rivendell Frames RAISE DAT STEM! Bob Gordon suggests Updates The Rivendell Catalog one way to ridyourselfoflower backpain Suspension & Set-up The Cheapskate 3 The Rivendell Reader, Number Three 5 The Days of Ovaltine and Judo Chops News Update:No more Cheap Bikes from Editorial EDITORIAL China Poetry Corner PROGRESS REPORT Just Keep A-Rollin', Wagon Wheels by Helen The Progress Report L Ett E R..S. Kelley A Death In The Family ... THE HAPPY RIDER Homeless Notes Letters INSIDE THE VARSlty by Marc Muller. Il - The Danish Dagger Story by Errett Callahan How Children Learn to Ride lustrated by Chris Fiorini Questions and Answers The Happy Rider The SPO Factor RIVENDELL MEMBERSHIP DRIVE How to Get a Job in the Bicycle Industry by The Dirt On Mud CONTEST Win big.Yourchancetobe - Ric Comar Bicycle Suspension . comeasalesperson.Yourfiiendswillloveit! Member Interview #1: Tom Zowada, Knife - A Biography of Fred DeLong ORDER FORM maker Member Profile: Tim Mitoma .. THE FEEL OF WOOD byMarshallFisher. The Beat Generation by Roy Herman, Rash Brooks Saddles and the Brooks Saddle Com - Reprintedwithpermission Dr. pany CATS, CRANKS, AND MOMENTS by A Short History of Carradice The George T. Flegg Story NicholasJasper Frame Materials Madness by Jim Papadopou - Reader Survey CHUCK HARRIS AND THE FIRST los The Rivendell Frames AMERICAN DERAILLEUR by Sheldon History with Herlihy by David Herlihy The All-Rounder Frame Brown Bike of the Year by Ted Costantino The Road Frame THE u FACTOR Last Second News The Mountain Frame WHY NOT DRIVE? By Howard Runyon The Fabric of Memory by Gary Keene The Rivendell Catalogue MERCHANDISE Rivendell Catalog THE TYGER By Gabe Konrad The Thoroughly Contented Riv. -
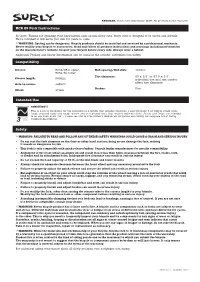
ECR 29 Fork Instructions Compatibility Intended Use Safety
RETAILER: These fork instructions MUST BE provided to the end user. ECR 29 Fork Instructions Hi there. Thanks for spending your hard-earned cash on this Surly fork. Surly stuff is designed to be useful and durable. We’re confident it will serve you well for years to come. WARNING: Cycling can be dangerous. Bicycle products should be installed and serviced by a professional mechanic. Never modify your bicycle or accessories. Read and follow all product instructions and warnings including information on the manufacturer’s website. Inspect your bicycle before every ride. Always wear a helmet. Additional Product and Safety Information can be found at the website: surlybikes.com/safety Compatibility Steerer: EC34/28.6 upper, Hub spacing/Hub dish: 100mm EC34/30 lower Tire clearance: 29 x 2.5˝ or 27.5 x 3.0˝, Steerer length: 260mm individual tire and rim combos affect tire clearance Axle-to-crown: 468mm Brakes: Disc Offset: 47mm Intended Use ASTM F2043 CONDITION 3 This is a set of conditions for the operation of a bicycle that includes Condition 1 and Condition 2 as well as rough trails, rough unpaved roads and rough terrain and unimproved trails that require technical skills. Jumps and Drops are intended to be less than 61cm (24˝). Please see link to Bike Owner’s Manual on surlybikes.com/safety for complete list of riding Jumps and drops are intended to be less than condition descriptions. 3 61cm (24″) Safety WARNING: FAILURE TO READ AND FOLLOW ANY OF THESE SAFETY WARNINGS COULD CAUSE A CRASH AND SERIOUS INJURY • Do not rest the fork dropouts on the floor or other hard surface; doing so can damage the fork, making it unsafe or dangerous to ride • This fork is only compatible with quick release fenders. -

Experimental Evaluation of Mountain Bike Suspension Systems J
Acta Polytechnica Vol. 43 No. 5/2003 Experimental Evaluation of Mountain Bike Suspension Systems J. Titlestad, T. Fairlie-Clarke, M. Davie, A. Whittaker, S. Grant A significant distinction between competitive mountain bikes is whether they have a suspension system. Research studies indicate that a suspension system gives advantages, but it is difficult to quantify the benefits because they depend on so many variables, including the physiology and psychology of the cyclist, the roughness of the track and the design of the suspension system. A laboratory based test rig has been built that allows the number of variables in the system to be reduced and test conditions to be controlled. The test rig simulates regular impacts of the rear wheel with bumps in a rolling road. The physiological variables of oxygen consumption and heart rate were measured, together with speeds and forces at various points in the system. Physiological and mechanical test results both confirm a significant benefit in using a suspension system on the simulated rough track, with oxygen consumption reduced by around 30 % and power transmitted through the pedals reduced by 30 % to 60 %. Keywords: mountain bike, suspension, dynamics. 1 Introduction 2 Test rig design Off-road cycling, or mountain biking, has developed as an important element of the sport of cycling in the last Past work 20 years. A significant distinction between competition bicy- Most experiments on the physiological effects of riding cles is whether or nor they have a suspension system. There bicycles are carried out using standard cycle dynamometer are three categories. A rigid frame (RF) mountain bike has no training machines where the machine is static; there are no suspension. -

English Summary Walter Ulreich / Wolfgang Wehap Die Geschichte Der PUCH-Fahrräder ISBN 978-3-7059-0381-4 22,5 X 26,5 Cm, 400 Seiten Mit Ca
English Summary Walter Ulreich / Wolfgang Wehap Die Geschichte der PUCH-Fahrräder ISBN 978-3-7059-0381-4 22,5 x 26,5 cm, 400 Seiten mit ca. 500 farbigen Abb., Hardcover mit Schutzumschlag, geb., Euro 48,– 1. Beginnings of Bicycle Manufacturing in Austria and Weishaupt Verlag • www.weishaupt.at Styria (1885 – 1889) High wheel bicycles first appeared in Austria-Hungary in 1880. Since they were originally imported from England, they were called “bicycles”. The word Fahrrad came later (though in Swiss German, Velo became the established term). Regular production of high wheel bicycles in Austria-Hungary began in Jan Kohout’s factory for agricultural machines in Smíchov, near Prague, in 1880, following English designs. Kohout’s sons Josef and Petr made a name for themselves and the bicycles as successful racers. Smaller makers before 1885, such as Valentin Wiegele in Korpitsch near Villach, only became known locally. In Vienna, Karl Greger’s Velociped-Fabrik started making high wheel bicycles in 1884 under the brand name ‘Austria’; the annual output seems to have reached 300–400 bicy- cles. In 1896, Greger was mentioned as “the oldest bicycle factory of Austria and one of the largest on the continent”, and as “ founder of the bicycle industry in Austria-Hunga- ry”. At about the same time as Greger, Carl Goldeband and the sewing-machine factory of H. Wagner also began making bicycles in Vienna. In the years from 1885 to 1889, there is good evidence that bicycles were also being made by Mathias Allmer, Josef Benesch und Josef Eigler in Graz, Johann Jax in Linz, Josef Fritsch in Eger (Cheb), Julius Mickerts und Otto Schäffler in Vienna, Nicolaus Heid in Stockerau, near Vienna and G. -

THE IMPORTANCE of SINGLETRACK from the International Mountain Bicycling Association
THE IMPORTANCE OF SINGLETRACK From the International Mountain Bicycling Association “Mountain biking on singletrack is like skiing in fresh powder, or matching the hatch while fly fishing, or playing golf at Pebble Beach.” —Bill Harris; Montrose, Colorado “On singletrack I meet and talk to lots of hikers and bikers and I don’t do that nearly as much on fire roads. Meeting people on singletrack brings you a little closer to them.” — Ben Marriott; Alberta, Canada INTRODUCTION In recent years mountain bike trail advocates have increasingly needed to defend the legitimacy of bicycling on singletrack trails. As land agencies have moved forward with a variety of recreational planning processes, some officials and citizens have objected to singletrack bicycling, and have suggested that bicyclists should be satisfied with riding on roads – paved and dirt surfaced. This viewpoint misunderstands the nature of mountain bicycling and the desires of bicyclists. Bike riding on narrow, natural surface trails is as old as the bicycle. In its beginning, all bicy- cling was essentially mountain biking, because bicycles predate paved roads. In many historic photographs from the late 19th-century, people are shown riding bicycles on dirt paths. During World War II the Swiss Army outfitted companies of soldiers with bicycles to more quickly travel on narrow trails through mountainous terrain. In the 1970’s, when the first mountain bikes were being fashioned from existing “clunkers,” riders often took their bikes on natural surface routes. When the mass production of mountain bikes started in the early 1980’s, more and more bicyclists found their way into the backcountry on narrow trails.