A Study of Graph Spectra for Comparing Graphs
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Boundary Value Problems on Weighted Paths
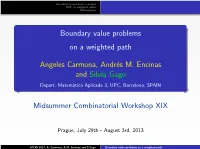
Introduction and basic concepts BVP on weighted paths Bibliography Boundary value problems on a weighted path Angeles Carmona, Andr´esM. Encinas and Silvia Gago Depart. Matem`aticaAplicada 3, UPC, Barcelona, SPAIN Midsummer Combinatorial Workshop XIX Prague, July 29th - August 3rd, 2013 MCW 2013, A. Carmona, A.M. Encinas and S.Gago Boundary value problems on a weighted path Introduction and basic concepts BVP on weighted paths Bibliography Outline of the talk Notations and definitions Weighted graphs and matrices Schr¨odingerequations Boundary value problems on weighted graphs Green matrix of the BVP Boundary Value Problems on paths Paths with constant potential Orthogonal polynomials Schr¨odingermatrix of the weighted path associated to orthogonal polynomials Two-side Boundary Value Problems in weighted paths MCW 2013, A. Carmona, A.M. Encinas and S.Gago Boundary value problems on a weighted path Introduction and basic concepts Schr¨odingerequations BVP on weighted paths Definition of BVP Bibliography Weighted graphs A weighted graphΓ=( V ; E; c) is composed by: V is a set of elements called vertices. E is a set of elements called edges. c : V × V −! [0; 1) is an application named conductance associated to the edges. u, v are adjacent, u ∼ v iff c(u; v) = cuv 6= 0. X The degree of a vertex u is du = cuv . v2V c34 u4 u1 c12 u2 c23 u3 c45 c35 c27 u5 c56 u7 c67 u6 MCW 2013, A. Carmona, A.M. Encinas and S.Gago Boundary value problems on a weighted path Introduction and basic concepts Schr¨odingerequations BVP on weighted paths Definition of BVP Bibliography Matrices associated with graphs Definition The weighted Laplacian matrix of a weighted graph Γ is defined as di if i = j; (L)ij = −cij if i 6= j: c34 u4 u c u c u 1 12 2 23 3 0 d1 −c12 0 0 0 0 0 1 c B −c12 d2 −c23 0 0 0 −c27 C 45 B C c B 0 −c23 d3 −c34 −c35 0 0 C 35 B C c27 L = B 0 0 −c34 d4 −c45 0 0 C B C u5 B 0 0 −c35 −c45 d5 −c56 0 C c56 @ 0 0 0 0 −c56 d6 −c67 A 0 −c27 0 0 0 −c67 d7 u7 c67 u6 MCW 2013, A. -

Variants of the Graph Laplacian with Applications in Machine Learning
Variants of the Graph Laplacian with Applications in Machine Learning Sven Kurras Dissertation zur Erlangung des Grades des Doktors der Naturwissenschaften (Dr. rer. nat.) im Fachbereich Informatik der Fakult¨at f¨urMathematik, Informatik und Naturwissenschaften der Universit¨atHamburg Hamburg, Oktober 2016 Diese Promotion wurde gef¨ordertdurch die Deutsche Forschungsgemeinschaft, Forschergruppe 1735 \Structural Inference in Statistics: Adaptation and Efficiency”. Betreuung der Promotion durch: Prof. Dr. Ulrike von Luxburg Tag der Disputation: 22. M¨arz2017 Vorsitzender des Pr¨ufungsausschusses: Prof. Dr. Matthias Rarey 1. Gutachterin: Prof. Dr. Ulrike von Luxburg 2. Gutachter: Prof. Dr. Wolfgang Menzel Zusammenfassung In s¨amtlichen Lebensbereichen finden sich Graphen. Zum Beispiel verbringen Menschen viel Zeit mit der Kantentraversierung des Internet-Graphen. Weitere Beispiele f¨urGraphen sind soziale Netzwerke, ¨offentlicher Nahverkehr, Molek¨ule, Finanztransaktionen, Fischernetze, Familienstammb¨aume,sowie der Graph, in dem alle Paare nat¨urlicher Zahlen gleicher Quersumme durch eine Kante verbunden sind. Graphen k¨onnendurch ihre Adjazenzmatrix W repr¨asentiert werden. Dar¨uber hinaus existiert eine Vielzahl alternativer Graphmatrizen. Viele strukturelle Eigenschaften von Graphen, beispielsweise ihre Kreisfreiheit, Anzahl Spannb¨aume,oder Random Walk Hitting Times, spiegeln sich auf die ein oder andere Weise in algebraischen Eigenschaften ihrer Graphmatrizen wider. Diese grundlegende Verflechtung erlaubt das Studium von Graphen unter Verwendung s¨amtlicher Resultate der Linearen Algebra, angewandt auf Graphmatrizen. Spektrale Graphentheorie studiert Graphen insbesondere anhand der Eigenwerte und Eigenvektoren ihrer Graphmatrizen. Dabei ist vor allem die Laplace-Matrix L = D − W von Bedeutung, aber es gibt derer viele Varianten, zum Beispiel die normalisierte Laplacian, die vorzeichenlose Laplacian und die Diplacian. Die meisten Varianten basieren auf einer \syntaktisch kleinen" Anderung¨ von L, etwa D +W anstelle von D −W . -

"Distance Measures for Graph Theory"
Distance measures for graph theory : Comparisons and analyzes of different methods Dissertation presented by Maxime DUYCK for obtaining the Master’s degree in Mathematical Engineering Supervisor(s) Marco SAERENS Reader(s) Guillaume GUEX, Bertrand LEBICHOT Academic year 2016-2017 Acknowledgments First, I would like to thank my supervisor Pr. Marco Saerens for his presence, his advice and his precious help throughout the realization of this thesis. Second, I would also like to thank Bertrand Lebichot and Guillaume Guex for agreeing to read this work. Next, I would like to thank my parents, all my family and my friends to have accompanied and encouraged me during all my studies. Finally, I would thank Malian De Ron for creating this template [65] and making it available to me. This helped me a lot during “le jour et la nuit”. Contents 1. Introduction 1 1.1. Context presentation .................................. 1 1.2. Contents .......................................... 2 2. Theoretical part 3 2.1. Preliminaries ....................................... 4 2.1.1. Networks and graphs .............................. 4 2.1.2. Useful matrices and tools ........................... 4 2.2. Distances and kernels on a graph ........................... 7 2.2.1. Notion of (dis)similarity measures ...................... 7 2.2.2. Kernel on a graph ................................ 8 2.2.3. The shortest-path distance .......................... 9 2.3. Kernels from distances ................................. 9 2.3.1. Multidimensional scaling ............................ 9 2.3.2. Gaussian mapping ............................... 9 2.4. Similarity measures between nodes .......................... 9 2.4.1. Katz index and its Leicht’s extension .................... 10 2.4.2. Commute-time distance and Euclidean commute-time distance .... 10 2.4.3. SimRank similarity measure ......................... -
![Arxiv:1912.12366V1 [Quant-Ph] 27 Dec 2019](https://docslib.b-cdn.net/cover/7670/arxiv-1912-12366v1-quant-ph-27-dec-2019-987670.webp)
Arxiv:1912.12366V1 [Quant-Ph] 27 Dec 2019
Approximate Graph Spectral Decomposition with the Variational Quantum Eigensolver Josh Paynea and Mario Sroujia aDepartment of Computer Science, Stanford University ABSTRACT Spectral graph theory is a branch of mathematics that studies the relationships between the eigenvectors and eigenvalues of Laplacian and adjacency matrices and their associated graphs. The Variational Quantum Eigen- solver (VQE) algorithm was proposed as a hybrid quantum/classical algorithm that is used to quickly determine the ground state of a Hamiltonian, and more generally, the lowest eigenvalue of a matrix M 2 Rn×n. There are many interesting problems associated with the spectral decompositions of associated matrices, such as par- titioning, embedding, and the determination of other properties. In this paper, we will expand upon the VQE algorithm to analyze the spectra of directed and undirected graphs. We evaluate runtime and accuracy compar- isons (empirically and theoretically) between different choices of ansatz parameters, graph sizes, graph densities, and matrix types, and demonstrate the effectiveness of our approach on Rigetti's QCS platform on graphs of up to 64 vertices, finding eigenvalues of adjacency and Laplacian matrices. We finally make direct comparisons to classical performance with the Quantum Virtual Machine (QVM) in the appendix, observing a superpolynomial runtime improvement of our algorithm when run using a quantum computer.∗ Keywords: Quantum Computing, Variational Quantum Eigensolver, Graph, Spectral Graph Theory, Ansatz, Quantum Algorithms 1. INTRODUCTION 1.1 Preliminaries Quantum computing is an emerging paradigm in computation which leverages the quantum mechanical phe- nomena of superposition and entanglement to create states that scale exponentially with number of qubits, or quantum bits. -
An Introduction to the Normalized Laplacian
An introduction to the normalized Laplacian Steve Butler Iowa State University MathButler.org A = f2; -1; -1g + 2 -1 -1 ∗ 2 -1 -1 2 4 1 1 2 4 -2 -2 -1 1 -2 -2 -1 -2 1 1 -1 1 -2 -2 -1 -2 1 1 Are there any other examples where A + A = A ∗ A (as a multi-set)? Yes! A = f0; 0; : : : ; 0g or A = f2; 2; : : : ; 2g Are there any other nontrivial examples? What does this have to do with this talk? Matrices are arrays of numbers Graphs are collections of objects with benefits. (vertices) and relations between 0 1 them (edges). 0 1 1 1 B1 0 1 0C B C 2 A = B C @1 1 0 0A 1 4 1 0 0 0 3 Example: eigenvalues are λ where for some x 6= 0 we have Graphs are very universal and Ax = λx. can model just about everything. f2:17:::; 0:31:::; -1; -1:48:::g Matrices are arrays of numbers Graphs are collections of objects with benefits. (vertices) and relations between 0 1 them (edges). 0 1 1 1 B1 0 1 0C B C 2 A = B C @1 1 0 0A 1 4 1 0 0 0 3 Example: eigenvalues are λ where for some x 6= 0 we have Graphs are very universal and Ax = λx. can model just about everything. f2:17:::; 0:31:::; -1; -1:48:::g Matrices are arrays of numbers Graphs are collections of objects with benefits. (vertices) and relations between 0 1 them (edges). -

4/2/2015 1.0.1 the Laplacian Matrix and Its Spectrum
MS&E 337: Spectral Graph Theory and Algorithmic Applications Spring 2015 Lecture 1: 4/2/2015 Instructor: Prof. Amin Saberi Scribe: Vahid Liaghat Disclaimer: These notes have not been subjected to the usual scrutiny reserved for formal publications. 1.0.1 The Laplacian matrix and its spectrum Let G = (V; E) be an undirected graph with n = jV j vertices and m = jEj edges. The adjacency matrix AG is defined as the n × n matrix where the non-diagonal entry aij is 1 iff i ∼ j, i.e., there is an edge between vertex i and vertex j and 0 otherwise. Let D(G) define an arbitrary orientation of the edges of G. The (oriented) incidence matrix BD is an n × m matrix such that qij = −1 if the edge corresponding to column j leaves vertex i, 1 if it enters vertex i, and 0 otherwise. We may denote the adjacency matrix and the incidence matrix simply by A and B when it is clear from the context. One can discover many properties of graphs by observing the incidence matrix of a graph. For example, consider the following proposition. Proposition 1.1. If G has c connected components, then Rank(B) = n − c. Proof. We show that the dimension of the null space of B is c. Let z denote a vector such that zT B = 0. This implies that for every i ∼ j, zi = zj. Therefore z takes the same value on all vertices of the same connected component. Hence, the dimension of the null space is c. The Laplacian matrix L = BBT is another representation of the graph that is quite useful. -

My Notes on the Graph Laplacian
CPSC 536N: Randomized Algorithms 2011-12 Term 2 Lecture 14 Prof. Nick Harvey University of British Columbia 1 Spectral Sparsifiers 1.1 Graph Laplacians Let G = (V; E) be an unweighted graph. For notational simplicity, we will think of the vertex set as n V = f1; : : : ; ng. Let ei 2 R be the ith standard basis vector, meaning that ei has a 1 in the ith coordinate and 0s in all other coordinates. For an edge uv 2 E, define the vector xuv and the matrix Xuv as follows: xuv := eu − uv T Xuv := xuvxuv In the definition of xuv it does not matter which vertex gets the +1 and which gets the −1 because the matrix Xuv is the same either way. Definition 1 The Laplacian matrix of G is the matrix X LG := Xuv uv2E Let us consider an example. 1 Note that each matrix Xuv has only four non-zero entries: we have Xuu = Xvv = 1 and Xuv = Xvu = −1. Consequently, the uth diagonal entry of LG is simply the degree of vertex u. Moreover, we have the following fact. Fact 2 Let D be the diagonal matrix with Du;u equal to the degree of vertex u. Let A be the adjacency matrix of G. Then LG = D − A. If G had weights w : E ! R on the edges we could define the weighted Laplacian as follows: X LG = wuv · Xuv: uv2E Claim 3 Let G = (V; E) be a graph with non-negative weights w : E ! R. Then the weighted Laplacian LG is positive semi-definite. -

Similarities on Graphs: Kernels Versus Proximity Measures1
Similarities on Graphs: Kernels versus Proximity Measures1 Konstantin Avrachenkova, Pavel Chebotarevb,∗, Dmytro Rubanova aInria Sophia Antipolis, France bTrapeznikov Institute of Control Sciences of the Russian Academy of Sciences, Russia Abstract We analytically study proximity and distance properties of various kernels and similarity measures on graphs. This helps to understand the mathemat- ical nature of such measures and can potentially be useful for recommending the adoption of specific similarity measures in data analysis. 1. Introduction Until the 1960s, mathematicians studied only one distance for graph ver- tices, the shortest path distance [6]. In 1967, Gerald Sharpe proposed the electric distance [42]; then it was rediscovered several times. For some col- lection of graph distances, we refer to [19, Chapter 15]. Distances2 are treated as dissimilarity measures. In contrast, similarity measures are maximized when every distance is equal to zero, i.e., when two arguments of the function coincide. At the same time, there is a close relation between distances and certain classes of similarity measures. One of such classes consists of functions defined with the help of kernels on graphs, i.e., positive semidefinite matrices with indices corresponding to the nodes. Every kernel is the Gram matrix of some set of vectors in a Euclidean space, and Schoenberg’s theorem [39, 40] shows how it can be transformed into the matrix of Euclidean distances between these vectors. arXiv:1802.06284v1 [math.CO] 17 Feb 2018 Another class consists of proximity measures characterized by the trian- gle inequality for proximities. Every proximity measure κ(x, y) generates a ∗Corresponding author Email addresses: [email protected] (Konstantin Avrachenkov), [email protected] (Pavel Chebotarev), [email protected] (Dmytro Rubanov) 1This is the authors’ version of a work that was submitted to Elsevier. -

An Elementary Proof of a Matrix Tree Theorem for Directed Graphs
SIAM REVIEW c 2020 Society for Industrial and Applied Mathematics Vol. 62, No. 3, pp. 716–726 An Elementary Proof of a Matrix Tree ∗ Theorem for Directed Graphs Patrick De Leenheery Abstract. We present an elementary proof of a generalization of Kirchhoff's matrix tree theorem to directed, weighted graphs. The proof is based on a specific factorization of the Laplacian matrices associated to the graphs, which involves only the two incidence matrices that capture the graph's topology. We also point out how this result can be used to calculate principal eigenvectors of the Laplacian matrices. Key words. directed graphs, spanning trees, matrix tree theorem AMS subject classification. 05C30 DOI. 10.1137/19M1265193 Kirchhoff's matrix tree theorem [3] is a result that allows one 1. Introduction. to count the number of spanning trees rooted at any vertex of an undirected graph by simply computing the determinant of an appropriate matrix|the so-called reduced Laplacian matrix|associated to the graph. A recentelementary proof of Kirchhoff's matrix tree theorem can be found in [5]. Kirchhoff's matrix theorem can be extended to directed graphs; see [4, 2, 7] for proofs. According to [2], an early proof of this extension is due to [1], although the result is often attributed to Tutte in [6] and is hence referred to as Tutte's Theorem. The goal of this paper is to provide an elemen- tary proof of Tutte's Theorem. Most proofs of Tutte's Theorem appear to be based on applying the Leibniz formula for the determinantof a matrix expressed as a sum over permutations of the matrix elements to the reduced Laplacian matrix associated to the directed graph. -

Seidel Signless Laplacian Energy of Graphs 1. Introduction
Mathematics Interdisciplinary Research 2 (2017) 181 − 191 Seidel Signless Laplacian Energy of Graphs Harishchandra S. Ramane?, Ivan Gutman, Jayashri B. Patil and Raju B. Jummannaver Abstract Let S(G) be the Seidel matrix of a graph G of order n and let DS (G) = diag(n − 1 − 2d1; n − 1 − 2d2; : : : ; n − 1 − 2dn) be the diagonal matrix with di denoting the degree of a vertex vi in G. The Seidel Laplacian matrix of G is defined as SL(G) = DS (G) − S(G) and the Seidel signless Laplacian + matrix as SL (G) = DS (G) + S(G). The Seidel signless Laplacian energy ESL+ (G) is defined as the sum of the absolute deviations of the eigenvalues of SL+(G) from their mean. In this paper, we establish the main properties + of the eigenvalues of SL (G) and of ESL+ (G). Keywords: Seidel Laplacian eigenvalues, Seidel Laplacian energy, Seidel sign- less Laplacian matrix, Seidel signless Laplacian eigenvalues, Seidel signless Laplacian energy. 2010 Mathematics Subject Classification: 05C50. 1. Introduction Let G be a simple, undirected graph with n vertices and m edges. We say that G is an (n; m)-graph. Let v1; v2; : : : ; vn be the vertices of G. The degree of a vertex vi is the number of edges incident to it and is denoted by di. If di = r for all i = 1; 2; : : : ; n, then G is said to be an r-regular graph. By G will be denoted the complement of the graph G. The adjacency matrix of a graph G is the square matrix A(G) = (aij) , in which aij = 1 if vi is adjacent to vj and aij = 0 otherwise. -

Spectra of Some Interesting Combinatorial Matrices Related to Oriented Spanning Trees on a Directed Graph
Journal of Algebraic Combinatorics 5 (1996), 5-11 © 1996 Kluwer Academic Publishers, Boston. Manufactured in The Netherlands. Spectra of Some Interesting Combinatorial Matrices Related to Oriented Spanning Trees on a Directed Graph CHRISTOS A. ATHANASIADIS [email protected] Department of Mathematics, Massachusetts Institute of Technology, Cambridge, MA 02139 Received October 19, 1994; Revised December 27, 1994 Abstract. The Laplacian of a directed graph G is the matrix L(G) = 0(G) — A(G), where A(G) is the adjacency matrix of G and O(G) the diagonal matrix of vertex outdegrees. The eigenvalues of G are the eigenvalues of A(G). Given a directed graph G we construct a derived directed graph D(G) whose vertices are the oriented spanning trees of G. Using a counting argument, we describe the eigenvalues of D(G) and their multiplicities in terms of the eigenvalues of the induced subgraphs and the Laplacian matrix of G. Finally we compute the eigenvalues of D(G) for some specific directed graphs G. A recent conjecture of Propp for D(Hn) follows, where Hn stands for the complete directed graph on n vertices without loops. Keywords: oriented spanning tree, l-walk, eigenvalue 1. Introduction Consider a directed graph G = (V, E) on a set of n vertices V, with multiple edges and loops allowed. An oriented rooted spanning tree on G, or simply an oriented spanning tree on G, is a subgraph T of G containing all n vertices of G and having a distinguished vertex r, called the root, such that for every v e V there is a unique (directed) path in T with initial vertex v and terminal vertex r. -

Cauchy-Binet for Pseudo-Determinants
CAUCHY-BINET FOR PSEUDO-DETERMINANTS OLIVER KNILL Abstract. The pseudo-determinant Det(A) of a square matrix A is defined as the product of the nonzero eigenvalues of A. It is a basis-independent number which is up to a sign the first nonzero entry of the characteristic polynomial of A. We prove Det(FTG) = P P det(FP)det(GP) for any two n × m matrices F; G. The sum to the right runs over all k × k minors of A, where k is determined by F and G. If F = G is the incidence matrix of a graph this directly implies the Kirchhoff tree theorem as L = F T G is then 2 the Laplacian and det (FP ) 2 f0; 1g is equal to 1 if P is a rooted spanning tree. A consequence is the following Pythagorean theo- rem: for any self-adjoint matrix A of rank k, one has Det2(A) = P 2 P det (AP), where det(AP ) runs over k × k minors of A. More generally, we prove the polynomial identity det(1 + xF T G) = P jP j P x det(FP )det(GP ) for classical determinants det, which holds for any two n × m matrices F; G and where the sum on the right is taken over all minors P , understanding the sum to be 1 if jP j = 0. T P 2 It implies the Pythagorean identity det(1 + F F ) = P det (FP ) which holds for any n × m matrix F and sums again over all mi- nors FP . If applied to the incidence matrix F of a finite simple graph, it produces the Chebotarev-Shamis forest theorem telling that det(1 + L) is the number of rooted spanning forests in the graph with Laplacian L.