The Electromagnetically Sustained Rhodes Piano
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tyrone Jackson, Jazz Piano
KENNESAW STATE UNIVERSITY SCHOOL OF MUSIC Tyrone Jackson Faculty Recital "Tribute to The Fender Rhodes in Jazz" Tyrone Jackson, fender rhodes Karla Harris, vocals Patrick Arthur, electric guitar Brandon Boone, upright and electric bass Chris Burroughs, drums Frankie Quinones, percussion Wednesday, October 18, 2017 at 8 pm Dr. Bobbie Bailey & Family Performance Center, Morgan Hall Twenty-eighth Concert of the 2017-18 Concert Season program This concert is a tribute to the iconic instrument, the Fender Rhodes. The Rhodes piano (also known as the Fender Rhodes piano or simply Fender Rhodes or Rhodes) is an electric piano invented by Harold Rhodes, which became particularly popular throughout the 1970s. CBS oversaw mass production of the Rhodes piano in the 1970s, and it was used extensively through the decade, particularly in jazz, pop, and soul music. The Rhodes became a staple in recordings and live performances for renown keyboard artists Herbie Hancock and Chick Corea. A resurgence of the instrument recently has been realized through jazz musicians Nicholas Payton and Christian Scott. "Tribute to The Fender Rhodes in Jazz" The Backwards Step / Nicholas Payton Scenario / Tyrone Jackson Come Together / Lennon-McCartney Cry Me A River / Arthur Hamilton Benin / Tyrone Jackson By Chance / Tyrone Jackson Take 5 / Desmond-Brubeck Sound of Music / Rodgers-Hammerstein Butterfly / Herbie Hancock Song for Bilbao / Pat Methany Lecturer in Jazz Studies and Jazz Piano yrone Jackson – the name is quickly becoming synonymous with the quintessential jazz piano player. His boundless creativity coupled with subtle accompaniments has Tyrone poised for national recognition. TBorn in the New Orleans cradle of jazz, Jackson embodies the spirit of the Crescent City. -

Magpick: an Augmented Guitar Pick for Nuanced Control
Magpick: an Augmented Guitar Pick for Nuanced Control Fabio Morreale Andrea Guidi Andrew McPherson Creative Arts and Industries Centre For Digital Music Centre For Digital Music University of Auckland, Queen Mary University of Queen Mary University of New Zealand London, UK London, UK [email protected] [email protected] [email protected] ABSTRACT This paper introduces the Magpick, an augmented pick for electric guitar that uses electromagnetic induction to sense the motion of the pick with respect to the permanent mag- nets in the guitar pickup. The Magpick provides the gui- tarist with nuanced control of the sound that coexists with traditional plucking-hand technique. The paper presents three ways that the signal from the pick can modulate the guitar sound, followed by a case study of its use in which 11 guitarists tested the Magpick for five days and composed a piece with it. Reflecting on their comments and experi- Figure 1: The Magpick is composed of two parts: a ences, we outline the innovative features of this technology hollow body (black) and a cap (brass). from the point of view of performance practice. In partic- ular, compared to other augmentations, the high tempo- ral resolution, low latency, and large dynamic range of the The challenge is to find ways to sense the movement of Magpick support a highly nuanced control over the sound. the pick with respect to the guitar with high resolution, Our discussion highlights the utility of having the locus of high dynamic range, and low latency, then use the resulting augmentation coincide with the locus of interaction. -

Guitar Resonator GR-Junior II
Guitar Resonator GR-Junior II User Manual Copyright © by Vibesware, all rights reserved. www.vibesware.com Rev. 1.0 Contents 1 Introduction ...............................................................................................1 1.1 How does it work ? ...............................................................................1 1.2 Differences to the EBow and well known Sustainers ............................2 2 Fields of application .................................................................................3 2.1 Feedback playing everywhere / composing / recording ........................3 2.2 On stage ...............................................................................................3 2.3 New ways of playing .............................................................................4 3 Start-Up of the GR-Junior .........................................................................5 4 Playing techniques ...................................................................................5 4.1 Basics ...................................................................................................5 4.2 Harmonics control by positioning the Resonator ...................................6 4.3 Changing harmonics by phase shifting .................................................6 4.4 Some string vibration basics .................................................................6 4.5 Feedback of multiple strings .................................................................9 4.6 Limits of playing, pickup selection, -

Real-Time Physical Model of a Wurlitzer and Rhodes Electric Piano
Proceedings of the 20th International Conference on Digital Audio Effects (DAFx-17), Edinburgh, UK, September 5–9, 2017 REAL-TIME PHYSICAL MODEL OF A WURLITZER AND RHODES ELECTRIC PIANO Florian Pfeifle Systematic Musicology, University of Hamburg Hamburg, DE [email protected] ABSTRACT tation methodology as is published in [21]. This work aims at extending the existing physical models of mentioned publications Two well known examples of electro-acoustical keyboards played in two regards by (1) implementing them on a FPGA for real-time since the 60s to the present day are the Wurlitzer electric piano synthesis and (2) making the physical model more accurate when and the Rhodes piano. They are used in such diverse musical gen- compared to physical measurements as is discussed in more detail res as Jazz, Funk, Fusion or Pop as well as in modern Electronic in section 4 and 5. and Dance music. Due to the popularity of their unique sound and timbre, there exist various hardware and software emulations which are either based on a physical model or consist of a sample 2. RELATED WORK based method for sound generation. In this paper, a real-time phys- ical model implementation of both instruments using field pro- Scientific research regarding acoustic and electro-mechanic prop- grammable gate array (FPGA) hardware is presented. The work erties of both instruments is comparably sparse. Freely available presented herein is an extension of simplified models published user manuals as well as patents surrounding the tone production before. Both implementations consist of a physical model of the of the instruments give an overview of basic physical properties of main acoustic sound production parts as well as a model for the both instrument [5]; [7]; [8]; [13]; [4]. -
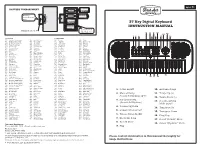
37 Key Digital Keyboard INSTRUCTION MANUAL
ages: 3+ BATTERY COMPARTMENT Battery Compartment Door 37 Key Digital Keyboard INSTRUCTION MANUAL Phillips head screw Insert 4X AA Size Batteries 5 6 7 10 14 13 1 2 4 8 9 11 12 100 SOUNDS 100 RHYTHMS T00 Acoustic Grand Piano T50 Synth Strings 2 R00 Fusion R50 Disco T01 Bright Acoustic Piano T51 Choir Aahs R01 Clup Pop R51 Electro Pop T02 Electric Grand Piano T52 Voice Oohs R02 16 Beat Pop R52 Hip Hop T03 Honky-Tonk Piano T53 Synth Voice R03 8 Beat Pop R53 Rap Pop T04 Rhodes Piano T54 Orchestra Hit R04 8 Beat Soul R54 Techno T05 Chorused Piano T55 Trumpet R05 Pop Rock R55 Trance T06 Harpsichord T56 Trombone R06 60's Soul R56 Funky Disco T07 Clavi T57 Tuba R07 8 Beat Rock R57 Disco Party T08 Celesta T58 Muted Trumpet R08 Funk R58 Disco Samba T09 Glockenspiel T59 French Horn R09 Twist R59 Club Latin T10 Music Box T60 Brass Section R10 British Pop R60 Club Dance T11 Vibraphone T61 Synth Brass 1 R11 Rock Ballad R61 Disco Funk T12 Marimba T62 Synth Brass 2 R12 Limbo Rock R62 Disco Hands T13 Xylophone T63 Soprano Sax R13 Hard Rock R63 Disco Alt T14 Tubular Bells T64 Alto Sax R14 Rock & Roll R64 Saturday Night T15 Dulcimer T65 Tenor Sax R15 Straight Rock R65 Hip Shuffle T16 Drawbar Organ T66 Baritone Sax R16 Jazz Rock R66 Garage T17 Percussive Organ T67 Oboe R17 Schlager Rock R67 UK Pop T18 Rock Organ T68 English Horn R18 Waltz R68 Slow & Easy T19 Church Organ T69 Bassoon R19 Samba R69 Modern Country Pop T20 Reed Organ T70 Clarinet R20 Tango R70 Country Ballad T21 Accordion T71 Piccolo R21 Cha Cha R71 Schlager T22 Harmonica T72 Flute R22 Paso -

Passive Simulation of the Nonlinear Port-Hamiltonian Modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie
Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie To cite this version: Antoine Falaize, Thomas Hélie. Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano. 2016. hal-01390534 HAL Id: hal-01390534 https://hal.archives-ouvertes.fr/hal-01390534 Preprint submitted on 2 Nov 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano Antoine Falaize1,∗, Thomas H´elie1,∗ Project-Team S3 (Sound Signals and Systems) and Analysis/Synthesis team, Laboratory of Sciences and Technologies of Music and Sound (UMR 9912), IRCAM-CNRS-UPMC, 1 place Igor Stravinsky, F-75004 Paris Abstract This paper deals with the time-domain simulation of an electro-mechanical pi- ano: the Fender Rhodes. A simplified description of this multi-physical system is considered. It is composed of a hammer (nonlinear mechanical component), a cantilever beam (linear damped vibrating component) and a pickup (nonlinear magneto-electronic transducer). The approach is to propose a power-balanced formulation of the complete system, from which a guaranteed-passive simulation is derived to generate physically-based realistic sound synthesis. -

Player's Guide
Player’s Guide Contents Imitations Flute...................................................................................6 Introduction Cello ..................................................................................6 Horn ...................................................................................6 How the EBow Works ........................................................2 Harmonica .........................................................................6 Opening Tips .....................................................................2 Energy Slide ......................................................................6 Switch Positions ................................................................2 Distortion Pick....................................................................6 How to Hold the EBow.......................................................2 How to Position the EBow .................................................2 Other Grips Methods of Control Reverse Grip .....................................................................7 Thumb Grip........................................................................7 String Activation .................................................................3 Finger Grip.........................................................................7 Gliding ...............................................................................3 Pressing.............................................................................3 Review Tilting .................................................................................4 -

0Hthl\L ,'A' L F:,1;Jjj:,',,1
DEEP BLUh E}OBEIY BFIOOM GREG ROCKINGHAM CHRIS FOFIEMAN 0HtHl\l ,'a' L f:,1;jjJ:,',,1 The music of Stevie Wonder left an indelible imprint on the minds of Bobby Broom, Chris Foreman, and Greg Rockingham while they were growing in the 1960s and '70s. Although all three musicians would come to focus on jazz as adults, ratherthan on pop and R&8, Wonder's songs were simply too sophisticated, melodically and harmonically, to forget. With Wondertul!, the Chicago-based Deep Blue Organ Trio's fourth CD and second for Origin Records, guitarist Broom, organist Foreman, and drummer Rockingham pay homage to Wonder with nine of his compositions rendered anew in the jazz organ trio tradition of which they have become among the world's most prominent purveyors. "Stevie was a huge influence on all of us," Broom states. "Most of my close friends were really into music long before I became a musician. I just remember anticipating his next release and everybody running and grabbing them up. Every Stevie release was an event, from Talking Book to Innervisions to Fullfíllingness' First Finale. That period in the early Seventies was monumental in terms of what he gave to us in that generation." Five of the selections on Wonderfull are drawn from the three aforementioned albums: "You've Got It Bad Girl" from L972's Talking Book, "Jesus Children of America" and "Golden Lady" from 1973's Innervisions, and "You Havent Done Nothin"'and "Ain't No Use" from L974's Fullfillingness' First Finale. "As" first appeared on the 1976 album Songs in the Key of Life. -

A Brief History of Piano Action Mechanisms*
Advances in Historical Studies, 2020, 9, 312-329 https://www.scirp.org/journal/ahs ISSN Online: 2327-0446 ISSN Print: 2327-0438 A Brief History of Piano Action Mechanisms* Matteo Russo, Jose A. Robles-Linares Faculty of Engineering, University of Nottingham, Nottingham, UK How to cite this paper: Russo, M., & Ro- Abstract bles-Linares, J. A. (2020). A Brief History of Piano Action Mechanisms. Advances in His- The action mechanism of keyboard musical instruments with strings, such as torical Studies, 9, 312-329. pianos, transforms the motion of a depressed key into hammer swing or jack https://doi.org/10.4236/ahs.2020.95024 lift, which generates sound by striking the string of the instrument. The me- Received: October 30, 2020 chanical design of the key action influences many characteristics of the musi- Accepted: December 5, 2020 cal instrument, such as keyboard responsiveness, heaviness, or lightness, which Published: December 8, 2020 are critical playability parameters that can “make or break” an instrument for a pianist. Furthermore, the color of the sound, as well as its volume, given by Copyright © 2020 by author(s) and Scientific Research Publishing Inc. the shape and amplitude of the sound wave respectively, are both influenced This work is licensed under the Creative by the key action. The importance of these mechanisms is highlighted by Commons Attribution International centuries of studies and efforts to improve them, from the simple rigid lever License (CC BY 4.0). mechanism of 14th-century clavichords to the modern key action that can be http://creativecommons.org/licenses/by/4.0/ found in concert grand pianos, with dozens of bodies and compliant elements. -

BOSS GT-3 FAQ Table of Contents
BOSS GT-3 FAQ Table of Contents Questions from Prospective Owners Q: What type of guitar works best with the GT-3? What type of pickups? Q: What kind of Amp works best with the GT-3? Q: Where can I hear examples of the GT-3? Q: How does GT3 Compare against POD? Q: How does GT3 Compare against RP-7? Q: How does GT3 Compare against RP-14D? Q: What are differences between GT-3 and GT-5? Q: Can I use the pedals to turn individual effects on and off (manual mode)? Q: Can I use the GT-3 with my electro/acoustic? Q: Where can I get the best price on GT-3? General Questions Q: Does anyone know if there are ROM? upgrades available for the GT-3? What is the latest chip version and how would I check what version mine is? Q: What PC software is available for the GT-3? Q: What MAC software is available for the GT-3? Q: Where can I get good patches? Q: Where can I upload patches? Q: Can I use GT-5 patches? Q: What should I use for a gig bag or case? Q: What is the deal with Brass Eagle Paintball Case? Q: What is Manual Mode? Q: Is there a way I can get the GT-3 to work like stompboxes, so that each of the pedals will control an effect? Q: In Manual mode, is it only possible to have one set of pedal assignments for all patches? Connections Q: How do I hook this thing up to my amp? Q: How do I hook up to a computer (for recording)? Q: How do I hook this up to a computer (for patch download)? Q: What kind of cable do I need for MIDI? Where can I find one? Q: What is the 4 cable method? What is the 5 cable method? What is the difference? Q: How do I hook up an external stompbox in the OD/DS loop? BOSS GT-3 FAQ Rev. -

Sonic Screwdriver’, Meant for Implementation in Iterations of Daniël Maalman’S Lost & Found Orchestra Sound Art Installations
Abstract This thesis showcases the development process of a tool for achieving a sustained, non-percussive sound that captures the sonic essence of ceramic objects, a so-called ‘sonic screwdriver’, meant for implementation in iterations of Daniël Maalman’s Lost & Found Orchestra sound art installations. The tool is meant to use a different way of sound excitation than Maalman’s conventional method of simply tapping objects with cores of solenoids. This is done by means of creating an audio feedback loop on the surface of the objects, which allows the objects speak in their own voice by using its resonant frequencies in an audio feedback loop. The audio feedback loop is composed of a contact microphone, a surface transducer and an audio amplifier. The system achieves accurate pitch control of the audio feedback at the resonant frequencies of an object by means of a control signal being input into the audio feedback loop via a second surface transducer. The developed solution can be used as a powerful tool in the creation of many types of sound art. 1 Quinten Tenger | Creative Technology | University of Twente | 2019 Acknowledgements First of all, I would like to thank Daniël Maalman for giving me the opportunity to work on this project, inspiring me with his way of working and being available to answer questions day and night. It has been a truly interesting and rewarding challenge. Furthermore, I would like to thank Edwin Dertien for helping me stay on track in times of confusion and frustration and his continuous support and guidance, as well as Erik Faber’s. -

EVP88 User Manual
User Manual EVP88 Emagic Vintage Piano 88 March 2001 Software Instruments >> Version 1.0, April 2001 User Manual English >> English Edition E Soft- und Hardware GmbH License Agreement Important! Please read this licence agreement carefully before opening the disk seal! Opening of the disk seal and use of this package indicates your agreement to the following terms and conditions. Emagic grants you a non-exclusive, non-transferable license to use the software in this package. You may: 1. use the software on a single machine. 2. make one copy of the software solely for back-up purposes. You may not: 1. make copies of the user manual or the software except as expressly provided for in this agreement. 2. make alterations or modifications to the software or any copy, or otherwise attempt to discover the source code of the software. 3. sub-license, lease, lend, rent or grant other rights in all or any copy to others. Except to the extent prohibited by applicable law, all implied warranties made by Emagic in connection with this manual and software are limited in duration to the minimum statutory guarantee period in your state or country from the date of original purchase, and no warranties, whether express or implied, shall apply to this product after said period. This warranty is not transferable-it applies only to the original purchaser of the software. Emagic makes no warranty, either express or implied, with respect to this software, its quality, performance, merchantability or fitness for a particular purpose. As a result, this software is sold “as is”, and you, the purchaser, are assuming the entire risk as to quality and performance.