Design, Testing and Implementation of A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Memory Processors Ink and Toners Ncomputing Virtual Desktop Card
*Bargained Products are Highlighted Red. Ink and Toners NComputing Virtual Desktop Memory Ink/Cartridge X-SERIES Virtual Desktops DDR3 Canon CL-41 Color Ink Cartridge 1080.00 X550 24750.00 16GB DDR3 1600 Kingston (KHX1600C9D3K4/16GX) 4200.00 Canon CL-741 Color Ink Cartridge 980.00 L-SERIES Computer Access Terminal 1GB DDR3 1333 Apacer 320.00 Canon CL-811 Color FINE Cartridge (Dye) 870.00 L130 9999.00 2GB DDR3 1333 Dolgix 440.00 Canon CL-831 Color FINE Cartridge, Low Capacity L230 (Dye) 995.00 12100.00 2GB DDR3 1333 KINGSTON 640.00 Canon CL-980 Color Ink Cartridge 720.00 U-SERIES Virtual DEsktop 2GB DDR3 1333 Ovation 400.00 CANON CLI-8 680.00 U170 6500.00 2GB DDR3 1600 Kingston (KHX1600C9AD3/2G) 830.00 Canon CLI-821 540.00 Card Readers 2GB DDR3 1600 Kingston (KHX1600C9AD3B1/2G) 780.00 Canon PG-40 Black FINE Cartridge, Standard Capacity 890.00 Internal Card Reader 32GB DDR3 1600 Kingston HyperX (Pigment) (KHX1600C9D3K8/32GX) 8340.00 External Card Readers Canon PG-740 Black Ink Cartridge 750.00 4GB DDR3 1333 Dolgix 840.00 Canon PG-810 Black FINE Cartridge (Pigment) 680.00 Peripherals 4GB DDR3 1333 Emaxx 850.00 Canon PG-830 Black FINE Cartridge, Low Capacity 740.00 Accessories 4GB DDR3 1333 KINGSTON 1050.00 (Pigment) A4tech HF-100 Headset Stand____Sale!!! 85.00 Canon PG-88 Black Ink Cartridge 600.00 4GB DDR3 1600 Kingston (KHX1600C9AD3K2/4G) 1600.00 Cliptec Key Lock Notebook ZL525 450.00 CANON PGI-5 Black FINE Cartridge (Pigment) 775.00 4GB DDR3 1600 Kingston (KHX1600C9D3B1/4G 1350.00 Fan USB Mini 200.00 4GB PC3 (2 x 2GB) 1800MHz Patriot -

2015 Annual General Meeting Invitation, Proxy Statement And
2015 Annual General Meeting Invitation, Proxy Statement and Annual Report (iii) To Our Shareholders It’s clear that those parts of Logitech’s business that we focus on most – the Company’s future – show great We are pleased to report that Fiscal Year 2015 was a promise. Here’s more detail: strong year for Logitech, further advancing the Company’s transformation that started two years ago. Growth Category Logitech’s Growth category comprised Tablet and Other This past year demonstrated the effectiveness of our Accessories, Gaming, and Mobile Speakers at the start strategy and its resilience even in the face of challenges. of Fiscal Year 2015. By Q4 we added a fourth business: The PC market declined, the iPad market declined and we Video Collaboration. underwent a lengthy internal investigation. By November 2014 the internal investigation was behind us and our Our growth businesses are key engines of our growth financial statements had been corrected. Against this transformation. And these engines showed horsepower: backdrop, we delivered solid Fiscal Year 2015 results: our Growth category contributed nearly $600 million in sales for FY 2015 and grew 25 percent year over year. • Sales of $2.11 billion, down 1 percent compared to FY Both our Mobile Speakers and Video Collaboration 2014, and up 2 percent in constant currency. businesses more than doubled over the course of the fiscal year. • GAAP operating income was $15 million with earnings per share at $0.06. In constant currency, the Growth category increased by 28 percent year over year in FY 2015, and by 45 percent • Cash flow from operations was $179 million. -
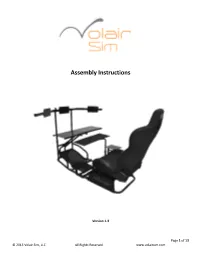
Assembly Instructions
Assembly Instructions Version 1.3 Page 1 of 13 © 2013 Volair Sim, LLC All Rights Reserved www.volairsim.com Thank you for purchasing the Volair SimTM chassis! We hope that it will give you countless hours of enjoyment. We have designed the Volair SimTM with maximum ease of assembly but please read carefully the instructions first. If you have any questions during the assembly, please visit our web-site at www.volairsim.com or e-mail us at [email protected] Your Volair SimTM chassis is shipped in one large shipping box. It is recommended that you find an open space to carefully unpack and inventory everything before beginning assembly. Please refer to the illustration below to verify that you have all of the chassis components and Table 1 that you have all of the parts. Throughout the process, please refer to the Installation Drawing and Table 1 which reference the parts used during each step. Note that some of the components may vary slightly from the photos as we continuously improve our products and certain parts may be pre- assembled for your convenience. Volair SimTM Chassis Components Page 2 of 13 © 2013 Volair Sim, LLC All Rights Reserved www.volairsim.com No. Part Name Quantity Photo No. Part Name Quantity Photo M6*25mm Inner Hexagon 4 pieces (all M8*20mm Inner 1 11 4 pieces Circle Cup Machine Screw pre-installed) Hexagon Screw M6*30mm Inner Hexagon 2 2 pieces 12 M8 Self-Locking Nut 1 piece Circle Cup Machine Screw M8*16mm Inner Hexagon Keyboard Tray 3 4 pieces 13 1 piece Machine Screw Plastic Washer Inner Hexagon 4 M6 Self-Locking -

Redline GT Manual
Flat Panel Television and Flight Controls Not Included Display Requirements: 32” to 42” Television with HDMI Input 4616 W. 19th Street, Cicero, IL 60804 (800) 379-9776 Rev 1.0 Redline GTTM Thank you for purchasing Chicago Gaming Company’s Redline GT. We strongly recommend that you follow the instructions and procedures as presented in this Owner’s Manual and that it be read in its entirety before setting up your game. 1. LEGAL INFORMATION 1.1 SAFETY PROCEDURES The following guidelines will help protect you and your Redline GT. Caution: For your safety follow these instructions. Caution: Shock hazard if instructions are not followed. • Read these instructions. • Keep these instructions. • Heed all warnings. • Follow all instructions. • Do not use this apparatus near water. • Clean only with a dry cloth. • Do not block any ventilation openings. Install in accordance with manufacturer’s instructions. • Do not install near any heat sources such as radiators, heat registers, stoves, or other apparatus (including amplifiers) that produce heat. • Do not defeat the safety purpose of the polarized or grounding-type plug. A polarized plug has two blades with one wider than the other. A grounding type plug has two blades and a third grounding prong. The wide blade and third prong are provided for your safety. If the provided plug does not fit into your outlet, consult an electrician for replacement of the obsolete outlet. • Protect the power cord from being walked on or pinched particularly at plugs, convenience receptacles, and the point where they exit from the apparatus. • Only use attachments/accessories specified from the manufacturer. -
Logitech G25 Instruction Manual Download Logitech G25 Instruction Manual
Logitech G25 Instruction Manual Download Logitech G25 Instruction Manual Logitech G25 Manuals & User Guides User Manuals, Guides and Specifications for your Logitech G25 Video Game Controller. Database contains 1 Logitech G25 Manuals (available for free online viewing or downloading in PDF): Installation. Logitech G25 Installation (2 pages) Logitech. If you are planning to improve your sim experience and you have a Logitech wheelbase setup, no worries! In our shop, you can find our Logitech Adapter that works perfectly with all Cube Controls range of Formula and GT steering wheels. On the most popular wheel bases: Logitech G29; Logitech G27; Logitech G25. Thrustmaster Hey guys, on christmas I will get gt sport + logitech g29 + shifter. I'm thinking about modding it to a sequential shifter as well. As I currently don't have the game and shifter, I also want to know if it is possible the re-map gear 3 and 4 of the shifter to shift down an up via the config menu? Free download of your Logitech G25 Racing Wheel User Manual. Still need help after reading the user manual? Post your question in our forums. 16 Aug 2020. Logitech G25 Software and Update Driver for Windows 10, 8, 7 - Mac. Here you can Logitech Gaming Drivers free and easy, just. As far as I know, controllers like the G25 - G27 are a simple on - off button connected to a pedal that you toggle with your foot. So, in real life, you're using various levels of pressure on the clutch pedal to control how fast or smoothly the clutch is engaged - disengaged. -

2016 Annual General Meeting Invitation, Proxy Statement and Annual Report
2016 Annual General Meeting Invitation, Proxy Statement and Annual Report TO OUR SHAREHOLDERS WE ARE PLEASED TO REPORT AN EXCELLENT We grew across each of our regions. We grew in our FISCAL YEAR 2016 – THE CULMINATION OF THREE Growth category and in our Profit Maximization category. YEARS OF REINVENTION. IN FACT, AS WE ENTER In fact, more than 80 percent of our retail sales were in OUR 35TH YEAR, WE FEEL LIKE A YOUNG COMPANY. growing categories. And we increased our market share across almost all our categories. What’s more, our Three key foundational strengths drove our FY 2016 growth was profitable: non-GAAP operating income was performance, as well as our transformation these past a better-than-expected $179 million. years: innovation, execution, and cost management. As a result, we ended the year with our strongest retail sales INNOVATION ACROSS A DIVERSE PORTFOLIO growth in five years. Key highlights include*: It seems unimaginable that we could have our strongest • Sales of $2.02 billion grew 1 percent compared year of growth and our third consecutive year of growth in Letter to Shareholders to FY 2015. Retail sales (the entire “go-forward” Fiscal Year 2016 despite continuing steep declines in the business) grew 9 percent in constant currency. PC and iPad markets. Just look at the key facts. First, we • GAAP operating income was $129 million, with grew strongly outside our PC and tablet peripheral product earnings per share at $0.77. Non-GAAP operating categories. And second, we even grew our mouse and income was a better-than-expected $179 million, with keyboard categories modestly through good innovation. -

Instructions on Logitech G27 Support
Steering Wheel V1.1 1. Introduction Advantages: Real Force Feedback Vibrations from different road surfaces, rumble strips, bumps and so on Support clutch Support manual gear: H-pattern(6+1)shift or Sequential(+/-) shift Support automatic Gear Support RPM/Shift indicator LED All major key functions are set and ready for use (Keys can also be remapped) Wheel angle adjustable No delay or lag Supported wheels: Logitech G920 Logitech G29 Logitech G27 Logitech G25 Logitech Driving Force GT Logitech Driving Force Pro Thrustmaster T300 RS Supported Consoles: PS5/PS4 /XBox Series X(S)/XBox One/XBox 360/Nintendo Switch Expert Mode Games: DriveClub, Project Cars, Project Cars 2, Sebastien Loeb Rally Evo, Dirt Rally, Dirt 4, Assetto Corsa, F1 2015, F1 2016, F1 2017, WRC5, WRC6, GT Sport etc. 2. Usage Step 1: Wiring Firstly, connect the original controller (USB 1) and the wheel (USB 2 or 3) to ReaSnow S1, and then connect ReaSnow S1 to console. On PS5, a suitable 3rd-party controller is required to be connected to USB 1, Plese check “workarounds for PS5” for the latest and full controller list. And Expert Mode steering wheel support can’t be used in PS Remote Play mode too. Step 2: Add a Config Add a config, such as “Expert Mode” in ReaSnow S1 with our APP. Then you are ready to drive. 3. Notes ● Expert Mode and Legacy Mode In Expert Mode, your wheel will work as a real wheel(G29/G920), which can be recognized by the console. In Legacy Mode, your wheel will work as a controller, and it will also be treated as a controller by the console. -

United States Securities and Exchange Commission Form
Table of Contents UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 FORM 10-K ý ANNUAL REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the fiscal year ended March 31, 2016 or o TRANSITION REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the Transition Period from to Commission File Number: 0-29174 LOGITECH INTERNATIONAL S.A. (Exact name of registrant as specified in its charter) Canton of Vaud, Switzerland None (State or other jurisdiction of (I.R.S. Employer incorporation or organization) Identification No.) Logitech International S.A. Apples, Switzerland c/o Logitech Inc. 7700 Gateway Boulevard Newark, California 94560 (Address of principal executive offices and zip code) (510) 795-8500 (Registrant's telephone number, including area code) Securities registered pursuant to Section 12(b) of the Act: Title of each class Name of each exchange on which registered Registered Shares par value CHF 0.25 per share The NASDAQ Global Select Market; SIX Swiss Exchange Securities registered or to be registered pursuant to Section 12(g) of the Act: None Indicate by check mark if the registrant is a well-known seasoned issuer, as defined in Rule 405 of the Securities Act. Yes ý No o Indicate by check mark if the registrant is not required to file reports pursuant to Section 13 or Section 15(d) of the Act. Yes o No ý Indicate by check mark whether the registrant (1) has filed all reports required to be filed by Section 13 or 15(d) of the Securities Exchange Act of 1934 during the preceding 12 months (or for such shorter period that the registrant was required to file such reports), and (2) has been subject to such filing requirements for the past 90 days. -

2014 Annual General Meeting Invitation, Proxy Statement And
JOB TITLE Logitech Combo REVISION 13 SERIAL<12345678> DATE Wednesday, November 19, 2014 JOB NUMBER 270463 TYPE PAGE NO. i OPERATOR JOYD Logitech 201 4 Invitation, Proxy Statement & Annual Report 2014 Annual General Meeting Invitation, Proxy Statement and Annual Report JOB TITLE Logitech Combo REVISION 13 SERIAL<12345678> DATE Wednesday, November 19, 2014 JOB TITLE Logitech Combo REVISION 13 SERIAL DATE Wednesday, November 19, 2014 JOB NUMBER 270463 TYPE PAGE NO. ii OPERATOR JOYD JOB NUMBER 270463 TYPE PAGE NO. i OPERATOR JOYD À l'attention de nos actionnaires, Madame, Monsieur, Vous recevez le rapport annuel 2014 avec retard, ce dont nous vous prions de bien vouloir nous excuser. Ainsi que nous l’avions annoncé en mai de cette année, l’enquête menée par notre comité d’audit, assisté de conseillers externes indépendants, a nécessité une révision en profondeur de certaines données comptables, en particulier pour les exercices 2011et 2012. En préalable à la publication du formulaire 10-K, qui doit être finalisé et remis à l’US Securities and Exchange Commission (SEC), et dont dépend la publication du rapport qui vous est destiné, nous avions impérativement besoin de connaître l’issue de ces enquêtes. Celles-ci ont mis en lumière un problème de valorisation des stocks de notre produit Revue, abandonné depuis. En conséquence, nous avons dû procéder à une correction de ces valeurs, augmentant le coût des biens vendus au quatrième trimestre de l'exercice 2011, ainsi que les réserves d'inventaire et les dettes de fournisseurs de composants. Cette correction a induit une baisse du bénéfice net pour l’exercice 2011, celle-ci étant contrebalancée par une hausse identique du bénéfice en 2012. -

Logitech G29 Treiber Downloadl
Logitech G29 Treiber Downloadl Logitech G29 Treiber Downloadl 1 / 3 2 / 3 No information is available for this page.Learn why. No information is available for this page.Learn why. To enjoy a gaming experience at its best, you can rely on Logitech G29 Driving Force. This racing wheel allows you to feel the sensation of driving just like in the .... Logitech G29 Software & Driver Setup Install Download - Here we provide complete drivers for the operating system Windows 10, 8.1. 8. 7 And Mac (OS x) all.. logitech g29 treiber windows 10 · logitech g29 driver · g29 driver windows 10. Related posts: Logitech G27 Driver and Software Download for .... Logitech G29 Software & Driver Update,Setup- Guide Download- provides complete Download Software for Windows (7,8 and 10) And Mac (OS X ). Mit ihren beliebten Logitech SetPoint Treibern für Mx-Master- oder ... Logitech G29 Driving Force Racing Wheel USB, USB\VID_046D&PID_C24F, Nach den .... Download drivers for Logitech G29 Driving Force Racing Wheel USB (HID) other devices for free. Operating System Versions: Windows XP, 7, 8, 8.1, 10 (x64, .... Logitech G29 Software und Treiber alles was ihr zu den PS4 Lenkrädern wissen ... Software in das Download Paket gepackt, die ihr aber gar nicht haben wollt.. ... your wheel to a PC or laptop and downloading the latest drivers and firmware for ... For Logitech users, especially G920 and G29, you have to install the Logitech ... Logitech MOMO Force Feedback Racing Wheel (PC only) .... Logitech Gaming Software 9.02.65 Deutsch: Mit der "Logitech Gaming Software" personalisieren Sie Maus, Keyboard und Headsets von ... -
Simulación De Conducción Con Realidad Virtual Para El Estudio De La Seguridad Y Eficiencia Del Conductor
UNIVERSIDAD DE VALLADOLID E.T.S.I. TELECOMUNICACIÓN TRABAJO FIN DE GRADO GRADO EN INGENIERÍA DE TECNOLOGÍAS ESPECÍFICAS DE TELECOMUNICACIÓN MENCIÓN EN TELEMÁTICA Simulación de conducción con realidad virtual para el estudio de la seguridad y eficiencia del conductor Autor: D. Julián González Díaz Tutor: D. David González Ortega Valladolid, 11 de Julio de 2017 TÍTULO: Simulación de conducción con realidad virtual para el estudio de la seguridad y eficiencia del conductor AUTOR: D. Julián González Díaz TUTOR: D. David González Ortega DEPARTAMENTO: Departamento de Teoría de la Señal y Comunicaciones e Ingeniería Telemática TRIBUNAL PRESIDENTE: Dña. Miriam Antón Rodríguez VOCAL: D. Mario Martínez Zarzuela SECRETARIO: D. David González Ortega SUPLENTE: D. Francisco Javier Díaz Pernas SUPLENTE: D. José Fernando Díez Higuera FECHA: 11 de Julio de 2017 CALIFICACIÓN: 2 Resumen de TFG El objetivo de este Trabajo Fin de Grado es el estudio del comportamiento de los conductores a través de realización de pruebas en un entorno simulado. Concretamente, el empleo de técnicas que permitan realizar una estimación de la dirección de la mirada a través de diferentes características obtenidas del movimiento de la cara. Los datos obtenidos de la estimación son almacenados, permitiéndonos conocer el comportamiento del conductor, además de evaluar cuál de las diferentes técnicas empleadas en esta tarea es más precisa. De esta forma, se pueden analizar los resultados obtenidos, corrigiendo fallos como despistes o educando a los usuarios en una conducción más preventiva y segura. Este simulador se ha desarrollado con el motor de juegos Unity y el dispositivo para la detección del movimiento Kinect. -
Logitech International Sa
LOGITECH INTERNATIONAL SA FORM 10-K (Annual Report) Filed 06/05/15 for the Period Ending 03/31/15 Address 7700 GATEWAY BOULEVARD C/O LOGITECH INC NEWARK, CA 94560 Telephone 5107958500 CIK 0001032975 Symbol LOGI SIC Code 3577 - Computer Peripheral Equipment, Not Elsewhere Classified Industry Computer Peripherals Sector Technology Fiscal Year 03/31 http://www.edgar-online.com © Copyright 2015, EDGAR Online, Inc. All Rights Reserved. Distribution and use of this document restricted under EDGAR Online, Inc. Terms of Use. Table of Contents UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 FORM 10-K ANNUAL REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the fiscal year ended March 31, 2015 or TRANSITION REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the Transition Period from to Commission File Number: 0-29174 LOGITECH INTERNATIONAL S.A. (Exact name of registrant as specified in its charter) Canton of Vaud, Switzerland None (State or other jurisdiction of (I.R.S. Employer incorporation or organization) Identification No.) Logitech International S.A. Apples, Switzerland c/o Logitech Inc. 7700 Gateway Boulevard Newark, California 94560 (Address of principal executive offices and zip code) (510) 795-8500 (Registrant's telephone number, including area code) Securities registered pursuant to Section 12(b) of the Act: Title of each class Name of each exchange on which registered Registered Shares par value CHF 0.25 per share The NASDAQ Global Select Market; SIX Swiss Exchange Securities registered or to be registered pursuant to Section 12(g) of the Act: None Indicate by check mark if the registrant is a well-known seasoned issuer, as defined in Rule 405 of the Securities Act.