Prediction Markets, Mechanism Design, and Cooperative Game Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Game Theory- Prisoners Dilemma Vs Battle of the Sexes EXCERPTS
Lesson 14. Game Theory 1 Lesson 14 Game Theory c 2010, 2011 ⃝ Roberto Serrano and Allan M. Feldman All rights reserved Version C 1. Introduction In the last lesson we discussed duopoly markets in which two firms compete to sell a product. In such markets, the firms behave strategically; each firm must think about what the other firm is doing in order to decide what it should do itself. The theory of duopoly was originally developed in the 19th century, but it led to the theory of games in the 20th century. The first major book in game theory, published in 1944, was Theory of Games and Economic Behavior,byJohnvon Neumann (1903-1957) and Oskar Morgenstern (1902-1977). We will return to the contributions of Von Neumann and Morgenstern in Lesson 19, on uncertainty and expected utility. Agroupofpeople(orteams,firms,armies,countries)areinagame if their decision problems are interdependent, in the sense that the actions that all of them take influence the outcomes for everyone. Game theory is the study of games; it can also be called interactive decision theory. Many real-life interactions can be viewed as games. Obviously football, soccer, and baseball games are games.Butsoaretheinteractionsofduopolists,thepoliticalcampaignsbetweenparties before an election, and the interactions of armed forces and countries. Even some interactions between animal or plant species in nature can be modeled as games. In fact, game theory has been used in many different fields in recent decades, including economics, political science, psychology, sociology, computer science, and biology. This brief lesson is not meant to replace a formal course in game theory; it is only an in- troduction. -

Prisoners of Reason Game Theory and Neoliberal Political Economy
C:/ITOOLS/WMS/CUP-NEW/6549131/WORKINGFOLDER/AMADAE/9781107064034PRE.3D iii [1–28] 11.8.2015 9:57PM Prisoners of Reason Game Theory and Neoliberal Political Economy S. M. AMADAE Massachusetts Institute of Technology C:/ITOOLS/WMS/CUP-NEW/6549131/WORKINGFOLDER/AMADAE/9781107064034PRE.3D iv [1–28] 11.8.2015 9:57PM 32 Avenue of the Americas, New York, ny 10013-2473, usa Cambridge University Press is part of the University of Cambridge. It furthers the University’s mission by disseminating knowledge in the pursuit of education, learning, and research at the highest international levels of excellence. www.cambridge.org Information on this title: www.cambridge.org/9781107671195 © S. M. Amadae 2015 This publication is in copyright. Subject to statutory exception and to the provisions of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published 2015 Printed in the United States of America A catalog record for this publication is available from the British Library. Library of Congress Cataloging in Publication Data Amadae, S. M., author. Prisoners of reason : game theory and neoliberal political economy / S.M. Amadae. pages cm Includes bibliographical references and index. isbn 978-1-107-06403-4 (hbk. : alk. paper) – isbn 978-1-107-67119-5 (pbk. : alk. paper) 1. Game theory – Political aspects. 2. International relations. 3. Neoliberalism. 4. Social choice – Political aspects. 5. Political science – Philosophy. I. Title. hb144.a43 2015 320.01′5193 – dc23 2015020954 isbn 978-1-107-06403-4 Hardback isbn 978-1-107-67119-5 Paperback Cambridge University Press has no responsibility for the persistence or accuracy of URLs for external or third-party Internet Web sites referred to in this publication and does not guarantee that any content on such Web sites is, or will remain, accurate or appropriate. -

Chapter 16 Oligopoly and Game Theory Oligopoly Oligopoly
Chapter 16 “Game theory is the study of how people Oligopoly behave in strategic situations. By ‘strategic’ we mean a situation in which each person, when deciding what actions to take, must and consider how others might respond to that action.” Game Theory Oligopoly Oligopoly • “Oligopoly is a market structure in which only a few • “Figuring out the environment” when there are sellers offer similar or identical products.” rival firms in your market, means guessing (or • As we saw last time, oligopoly differs from the two ‘ideal’ inferring) what the rivals are doing and then cases, perfect competition and monopoly. choosing a “best response” • In the ‘ideal’ cases, the firm just has to figure out the environment (prices for the perfectly competitive firm, • This means that firms in oligopoly markets are demand curve for the monopolist) and select output to playing a ‘game’ against each other. maximize profits • To understand how they might act, we need to • An oligopolist, on the other hand, also has to figure out the understand how players play games. environment before computing the best output. • This is the role of Game Theory. Some Concepts We Will Use Strategies • Strategies • Strategies are the choices that a player is allowed • Payoffs to make. • Sequential Games •Examples: • Simultaneous Games – In game trees (sequential games), the players choose paths or branches from roots or nodes. • Best Responses – In matrix games players choose rows or columns • Equilibrium – In market games, players choose prices, or quantities, • Dominated strategies or R and D levels. • Dominant Strategies. – In Blackjack, players choose whether to stay or draw. -

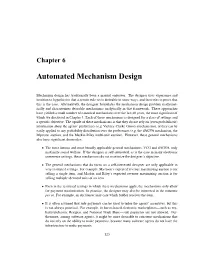
Multi-Pose Interactive Linkage Design Teaser
EUROGRAPHICS 2019 / P. Alliez and F. Pellacini Volume 38 (2019), Number 2 (Guest Editors) Multi-Pose Interactive Linkage Design Teaser G. Nishida1 , A. Bousseau2 , D. G. Aliaga1 1Purdue University, USA 2Inria, France a) b) e) f) Fixed bodies Moving bodies c) d) Figure 1: Interactive design of a multi-pose and multi-body linkage. Our system relies on a simple 2D drawing interface to let the user design a multi-body object including (a) fixed bodies, (b) moving bodies (green and purple shapes), (c) multiple poses for each moving body to specify the desired motion, and (d) a desired region for the linkage mechanism. Then, our system automatically generates a 2.5D linkage mechanism that makes the moving bodies traverse all input poses in a desired order without any collision (e). The system also automatically generates linkage parts ready for 3D printing and assembly (f). Please refer to the accompanying video for a demonstration of the sketching interface and animations of the resulting mechanisms. Abstract We introduce an interactive tool for novice users to design mechanical objects made of 2.5D linkages. Users simply draw the shape of the object and a few key poses of its multiple moving parts. Our approach automatically generates a one-degree-of- freedom linkage that connects the fixed and moving parts, such that the moving parts traverse all input poses in order without any collision with the fixed and other moving parts. In addition, our approach avoids common linkage defects and favors compact linkages and smooth motion trajectories. Finally, our system automatically generates the 3D geometry of the object and its links, allowing the rapid creation of a physical mockup of the designed object. -

Nash Equilibrium
Lecture 3: Nash equilibrium Nash equilibrium: The mathematician John Nash introduced the concept of an equi- librium for a game, and equilibrium is often called a Nash equilibrium. They provide a way to identify reasonable outcomes when an easy argument based on domination (like in the prisoner's dilemma, see lecture 2) is not available. We formulate the concept of an equilibrium for a two player game with respective 0 payoff matrices PR and PC . We write PR(s; s ) for the payoff for player R when R plays 0 s and C plays s, this is simply the (s; s ) entry the matrix PR. Definition 1. A pair of strategies (^sR; s^C ) is an Nash equilbrium for a two player game if no player can improve his payoff by changing his strategy from his equilibrium strategy to another strategy provided his opponent keeps his equilibrium strategy. In terms of the payoffs matrices this means that PR(sR; s^C ) ≤ P (^sR; s^C ) for all sR ; and PC (^sR; sC ) ≤ P (^sR; s^C ) for all sc : The idea at work in the definition of Nash equilibrium deserves a name: Definition 2. A strategy s^R is a best-response to a strategy sc if PR(sR; sC ) ≤ P (^sR; sC ) for all sR ; i.e. s^R is such that max PR(sR; sC ) = P (^sR; sC ) sR We can now reformulate the idea of a Nash equilibrium as The pair (^sR; s^C ) is a Nash equilibrium if and only ifs ^R is a best-response tos ^C and s^C is a best-response tos ^R. -

Computing in Mechanism Design∗
Computing in Mechanism Design¤ Tuomas Sandholm Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 1. Introduction Computational issues in mechanism design are important, but have received insufficient research interest until recently. Limited computing hinders mechanism design in several ways, and presents deep strategic interactions between com- puting and incentives. On the bright side, the vast increase in computing power has enabled better mechanisms. Perhaps most interestingly, limited computing of the agents can be used as a tool to implement mechanisms that would not be implementable among computationally unlimited agents. This chapter briefly reviews some of the key ideas, with the goal of alerting the reader to the importance of these issues and hopefully spurring future research. I will discuss computing by the center, such as an auction server or vote aggregator, in Section 2. Then, in Section 3, I will address the agents’ computing, be they human or software. 2. Computing by the center Computing by the center plays significant roles in mechanism design. In the following three subsections I will review three prominent directions. 2.1. Executing expressive mechanisms As algorithms have advanced drastically and computing power has increased, it has become feasible to field mecha- nisms that were previously impractical. The most famous example is a combinatorial auction (CA). In a CA, there are multiple distinguishable items for sale, and the bidders can submit bids on self-selected packages of the items. (Sometimes each bidder is also allowed to submit exclusivity constraints of different forms among his bids.) This increase in the expressiveness of the bids drastically reduces the strategic complexity that bidders face. -

Supermodular Mechanism Design
Theoretical Economics 5(2010),403–443 1555-7561/20100403 Supermodular mechanism design L M Department of Economics, University of Texas This paper introduces a mechanism design approach that allows dealing with the multiple equilibrium problem, using mechanisms that are robust to bounded ra- tionality. This approach is a tool for constructing supermodular mechanisms, i.e., mechanisms that induce games with strategic complementarities. In quasilinear environments, I prove that if a social choice function can be implemented by a mechanism that generates bounded strategic substitutes—as opposed to strate- gic complementarities—then this mechanism can be converted into a supermod- ular mechanism that implements the social choice function. If the social choice function also satisfies some efficiency criterion, then it admits a supermodular mechanism that balances the budget. Building on these results, I address the multiple equilibrium problem. I provide sufficient conditions for a social choice function to be implementable with a supermodular mechanism whose equilibria are contained in the smallest interval among all supermodular mechanisms. This is followed by conditions for supermodular implementability in unique equilib- rium. Finally, I provide a revelation principle for supermodular implementation in environments with general preferences. K.Implementation,mechanisms,multipleequilibriumproblem,learn- ing, strategic complementarities, supermodular games. JEL .C72,D78,D83. 1. I For the economist designing contracts, taxes, or other institutions, there is a dilemma between the simplicity of a mechanism and the multiple equilibrium problem. On the one hand, simple mechanisms often restrict attention to the “right” equilibria. In public good contexts, for example, most tax schemes overlook inefficient equilibrium situa- tions, provided that one equilibrium outcome is a social optimum. -

Formation of Coalition Structures As a Non-Cooperative Game
Formation of coalition structures as a non-cooperative game Dmitry Levando, ∗ Abstract We study coalition structure formation with intra and inter-coalition externalities in the introduced family of nested non-cooperative si- multaneous finite games. A non-cooperative game embeds a coalition structure formation mechanism, and has two outcomes: an alloca- tion of players over coalitions and a payoff for every player. Coalition structures of a game are described by Young diagrams. They serve to enumerate coalition structures and allocations of players over them. For every coalition structure a player has a set of finite strategies. A player chooses a coalition structure and a strategy. A (social) mechanism eliminates conflicts in individual choices and produces final coalition structures. Every final coalition structure is a non-cooperative game. Mixed equilibrium always exists and consists arXiv:2107.00711v1 [cs.GT] 1 Jul 2021 of a mixed strategy profile, payoffs and equilibrium coalition struc- tures. We use a maximum coalition size to parametrize the family ∗Moscow, Russian Federation, independent. No funds, grants, or other support was received. Acknowledge: Nick Baigent, Phillip Bich, Giulio Codognato, Ludovic Julien, Izhak Gilboa, Olga Gorelkina, Mark Kelbert, Anton Komarov, Roger Myerson, Ariel Rubinstein, Shmuel Zamir. Many thanks for advices and for discussion to participants of SIGE-2015, 2016 (an earlier version of the title was “A generalized Nash equilibrium”), CORE 50 Conference, Workshop of the Central European Program in Economic Theory, Udine (2016), Games 2016 Congress, Games and Applications, (2016) Lisbon, Games and Optimization at St Etienne (2016). All possible mistakes are only mine. E-mail for correspondence: dlevando (at) hotmail.ru. -

What Is Local Optimality in Nonconvex-Nonconcave Minimax Optimization?
What is Local Optimality in Nonconvex-Nonconcave Minimax Optimization? Chi Jin Praneeth Netrapalli University of California, Berkeley Microsoft Research, India [email protected] [email protected] Michael I. Jordan University of California, Berkeley [email protected] August 18, 2020 Abstract Minimax optimization has found extensive application in modern machine learning, in settings such as generative adversarial networks (GANs), adversarial training and multi-agent reinforcement learning. As most of these applications involve continuous nonconvex-nonconcave formulations, a very basic question arises—“what is a proper definition of local optima?” Most previous work answers this question using classical notions of equilibria from simultaneous games, where the min-player and the max-player act simultaneously. In contrast, most applications in machine learning, including GANs and adversarial training, correspond to sequential games, where the order of which player acts first is crucial (since minimax is in general not equal to maximin due to the nonconvex-nonconcave nature of the problems). The main contribution of this paper is to propose a proper mathematical definition of local optimality for this sequential setting—local minimax—as well as to present its properties and existence results. Finally, we establish a strong connection to a basic local search algorithm—gradient descent ascent (GDA)—under mild conditions, all stable limit points of GDA are exactly local minimax points up to some degenerate points. 1 Introduction arXiv:1902.00618v3 [cs.LG] 15 Aug 2020 Minimax optimization refers to problems of two agents—one agent tries to minimize the payoff function f : X × Y ! R while the other agent tries to maximize it. -
Chapter on Automated Mechanism Design
Chapter 6 Automated Mechanism Design Mechanism design has traditionally been a manual endeavor. The designer uses experience and intuition to hypothesize that a certain rule set is desirable in some ways, and then tries to prove that this is the case. Alternatively, the designer formulates the mechanism design problem mathemat- ically and characterizes desirable mechanisms analytically in that framework. These approaches have yielded a small number of canonical mechanisms over the last 40 years, the most significant of which we discussed in Chapter 4. Each of these mechanisms is designed for a class of settings and a specific objective. The upside of these mechanisms is that they do not rely on (even probabilistic) information about the agents' preferences (e.g. Vickrey-Clarke-Groves mechanisms), or they can be easily applied to any probability distribution over the preferences (e.g. the dAGVA mechanism, the Myerson auction, and the Maskin-Riley multi-unit auction). However, these general mechanisms also have significant downsides: ² The most famous and most broadly applicable general mechanisms, VCG and dAGVA, only maximize social welfare. If the designer is self-interested, as is the case in many electronic commerce settings, these mechanisms do not maximize the designer's objective. ² The general mechanisms that do focus on a self-interested designer are only applicable in very restricted settings. For example, Myerson's expected revenue maximizing auction is for selling a single item, and Maskin and Riley's expected revenue maximizing auction is for selling multiple identical units of an item. ² Even in the restricted settings in which these mechanisms apply, the mechanisms only allow for payment maximization. -

Game Theory: Basic Concepts and Terminology
Leigh Tesfatsion 29 December 2019 Game Theory: Basic Concepts and Terminology A GAME consists of: • a collection of decision-makers, called players; • the possible information states of each player at each decision time; • the collection of feasible moves (decisions, actions, plays,...) that each player can choose to make in each of his possible information states; • a procedure for determining how the move choices of all the players collectively determine the possible outcomes of the game; • preferences of the individual players over these possible out- comes, typically measured by a utility or payoff function. 1 EMPLOYER CD C (40,40) (10,60) WORKER D (60,10) (20,20) Illustrative Modeling of a Work-Site Interaction as a \Prisoner's Dilemma Game" D = Defect (Shirk) C = Cooperate (Work Hard), (P1,P2) = (Worker Payoff, Employer Payoff) 2 A PURE STRATEGY for a player in a particular game is a complete contingency plan, i.e., a plan describing what move that player should take in each of his possible information states. A MIXED STRATEGY for a player i in a particular game is a probability distribution defined over the collection Si of player i's feasible pure strategy choices. That is, a mixed strategy assigns a nonnegative probability Prob(s) to each pure strategy s in Si, with X Prob(s) = 1 : (1) s2Si EXPOSITIONAL NOTE: For simplicity, the remainder of these brief notes will develop defi- nitions in terms of pure strategies; the unqualified use of \strategy" will always refer to pure strategy. Extension to mixed strategies is conceptually straightforward. 3 ONE-STAGE SIMULTANEOUS-MOVE N-PLAYER GAME: • The game is played just once among N players. -

Lectures in Contract Theory1
Lectures in Contract Theory1 Steve Tadelis and Ilya Segal2 UC Berkeley and Stanford University Preliminary and Incomplete December 2005 1These notes were prepared for a second year graduate course in Contract theory at Stanford University (Econ 282/291) and UC Berkeley (Econ 206). They are preliminary and incomplete. Thanks also to Debbie Johnston for typing the first version and to Scott Hemphill for excellent research assistance. 2Copyright c 1998-2005 by Steven Tadelis and Ilya Segal. All rights reserved. No part of these° notes may be reproduced in any form by any electronuic or mechanical means without writen permission from the author. Contents IIntroduction 5 0.1Tradewithsmallnumbersofagents............... 6 0.2 Incentives ............................. 7 0.3BoundedRationality....................... 8 0.4Contracts,Mechanisms,Institutions............... 8 II Hidden Information 10 1 The Principal-Agent Model 12 1.1Setup................................ 12 1.1.1 Preferences........................ 12 1.1.2 Contracting........................ 13 1.2Single-CrossingandtheMonotonicityofChoice........ 13 1.3TheFullInformationBenchmark................ 16 1.4TheRevelationPrinciple..................... 18 1.5SolutionwithTwoTypes..................... 20 1.5.1 ManyDiscreteTypes................... 24 1.6SolutionwithaContinuumofTypes.............. 25 1.6.1 TheRelaxedProblem................... 28 1.6.2 Whattodoifmonotonicitybinds(technical)...... 31 1.7ApplicationsoftheModel.................... 32 1.7.1 SecondDegreePriceDiscrimination..........