Algebraicity Regarding Graphs and Tilings
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Circle Packing Theorem
Alma Mater Studiorum · Università di Bologna SCUOLA DI SCIENZE Corso di Laurea in Matematica THE CIRCLE PACKING THEOREM Tesi di Laurea in Analisi Relatore: Pesentata da: Chiar.mo Prof. Georgian Sarghi Nicola Arcozzi Sessione Unica Anno Accademico 2018/2019 Introduction The study of tangent circles has a rich history that dates back to antiquity. Already in the third century BC, Apollonius of Perga, in his exstensive study of conics, introduced problems concerning tangency. A famous result attributed to Apollonius is the following. Theorem 0.1 (Apollonius - 250 BC). Given three mutually tangent circles C1, C2, 1 C3 with disjoint interiors , there are precisely two circles tangent to all the three initial circles (see Figure1). A simple proof of this fact can be found here [Sar11] and employs the use of Möbius transformations. The topic of circle packings as presented here, is sur- prisingly recent and originates from William Thurston's famous lecture notes on 3-manifolds [Thu78] in which he proves the theorem now known as the Koebe-Andreev- Thurston Theorem or Circle Packing Theorem. He proves it as a consequence of previous work of E. M. Figure 1 Andreev and establishes uniqueness from Mostov's rigid- ity theorem, an imporant result in Hyperbolic Geometry. A few years later Reiner Kuhnau pointed out a 1936 proof by german mathematician Paul Koebe. 1We dene the interior of a circle to be one of the connected components of its complement (see the colored regions in Figure1 as an example). i ii A circle packing is a nite set of circles in the plane, or equivalently in the Riemann sphere, with disjoint interiors and whose union is connected. -

On Dynamical Gaskets Generated by Rational Maps, Kleinian Groups, and Schwarz Reflections
ON DYNAMICAL GASKETS GENERATED BY RATIONAL MAPS, KLEINIAN GROUPS, AND SCHWARZ REFLECTIONS RUSSELL LODGE, MIKHAIL LYUBICH, SERGEI MERENKOV, AND SABYASACHI MUKHERJEE Abstract. According to the Circle Packing Theorem, any triangulation of the Riemann sphere can be realized as a nerve of a circle packing. Reflections in the dual circles generate a Kleinian group H whose limit set is an Apollonian- like gasket ΛH . We design a surgery that relates H to a rational map g whose Julia set Jg is (non-quasiconformally) homeomorphic to ΛH . We show for a large class of triangulations, however, the groups of quasisymmetries of ΛH and Jg are isomorphic and coincide with the corresponding groups of self- homeomorphisms. Moreover, in the case of H, this group is equal to the group of M¨obiussymmetries of ΛH , which is the semi-direct product of H itself and the group of M¨obiussymmetries of the underlying circle packing. In the case of the tetrahedral triangulation (when ΛH is the classical Apollonian gasket), we give a piecewise affine model for the above actions which is quasiconformally equivalent to g and produces H by a David surgery. We also construct a mating between the group and the map coexisting in the same dynamical plane and show that it can be generated by Schwarz reflections in the deltoid and the inscribed circle. Contents 1. Introduction 2 2. Round Gaskets from Triangulations 4 3. Round Gasket Symmetries 6 4. Nielsen Maps Induced by Reflection Groups 12 5. Topological Surgery: From Nielsen Map to a Branched Covering 16 6. Gasket Julia Sets 18 arXiv:1912.13438v1 [math.DS] 31 Dec 2019 7. -

Study on the Problem of the Number Ring Transformation
The Research on Circle Family and Sphere Family The Original Topic: The Research and Generalizations on Several Kinds of Partition Problems in Combinatorics The Affiliated High School of South China Normal University Yan Chen Zhuang Ziquan Faculty Adviser:Li Xinghuai 153 The Research on Circle Family and Sphere Family 【Abstract】 A circle family is a group of separate or tangent circles in the plane. In this paper, we study how many parts at most a plane can be divided by several circle families if the circles in a same family must be separate (resp. if the circles can be tangent). We also study the necessary conditions for the intersection of two circle families. Then we primarily discuss the similar problems in higher dimensional space and in the end, raise some conjectures. 【Key words】 Circle Family; Structure Graph; Sphere Family; Generalized Inversion 【Changes】 1. Part 5 ‘Some Conjectures and Unsolved Problems’ has been rewritten. 2. Lemma 4.2 has been restated. 3. Some small mistakes have been corrected. 154 1 The Definitions and Preliminaries To begin with, we introduce some newly definitions and related preliminaries. Definition 1.1 Circle Family A circle family of the first kind is a group of separate circles;A circle family of the second kind is a group of separate or tangent circles. The capacity of a circle family is the number of circles in a circle family,the intersection of circle families means there are several circle families and any two circles in different circle families intersect. Definition 1.2 Compaction If the capacity of a circle family is no less than 3,and it intersects with another circle family with capacity 2,we call such a circle family compact. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -
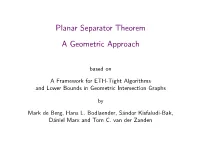
Planar Separator Theorem a Geometric Approach
Planar Separator Theorem A Geometric Approach based on A Framework for ETH-Tight Algorithms and Lower Bounds in Geometric Intersection Graphs by Mark de Berg, Hans L. Bodlaender, S´andor Kisfaludi-Bak, D´anielMarx and Tom C. van der Zanden Unit Disk Graphs • represent vertices as unit disks, i.e., disks with diameter 1 • disks intersect iff corresponding vertices are adjacent a d a b d b f $ e f e g g h h c c Unit Disk Graphs • represent vertices as unit disks, i.e., disks with diameter 1 • disks intersect iff corresponding vertices are adjacent • some unit disk graphs are planar a d a b d b f $ e f e g g h h c c Unit Disk Graphs • represent vertices as unit disks, i.e., disks with diameter 1 • disks intersect iff corresponding vertices are adjacent • some unit disk graphs are planar • some planar graphs are not unit disk graphs c c d b a d a 6$ b e f e f Geometric Separators Geometric Separators Geometric Separators Geometric Separators H Observation: Disks intersecting the boundary of H separate disks strictly inside H from disks strictly outside H . Small Balanced Separators Let G = (V ; E) be a graph. H ⊆ V is • a separator if there is a partition H; V1; V2 of V so that no edge in E has onep endpoint in V1 and one endpoint in V2, • small if jHj 2 O( n), • balanced if jV1j; jV2j ≤ βn for some constant β Small Balanced Geometric Separators H p Claim: There exists an H intersecting O( n) disks with ≤ 36=37n disks strictly inside H and ≤ 36=37n disks strictly outside H , i.e., H is a small balanced separator. -

Fixed Points, Koebe Uniformization and Circle Packings
Annals of Mathematics, 137 (1993), 369-406 Fixed points, Koebe uniformization and circle packings By ZHENG-XU HE and ODED SCHRAMM* Contents Introduction 1. The space of boundary components 2. The fixed-point index 3. The Uniqueness Theorem 4. The Schwarz-Pick lemma 5. Extension to the boundary 6. Maximum modulus, normality and angles 7. Uniformization 8. Domains in Riemann surfaces 9. Uniformizations of circle packings Addendum Introduction A domain in the Riemann sphere C is called a circle domain if every connected component of its boundary is either a circle or a point. In 1908, P. Koebe [Kol] posed the following conjecture, known as Koebe's Kreisnormierungsproblem: A ny plane domain is conformally homeomorphic to a circle domain in C. When the domain is simply connected, this is the con tent of the Riemann mapping theorem. The conjecture was proved for finitely connected domains and certain symmetric domains by Koebe himself ([K02], [K03]); for domains with various conditions on the "limit boundary compo nents" by R. Denneberg [De], H. Grotzsch [Gr], L. Sario [Sa], H. Meschowski *The authors were supported by N.S.F. Grants DMS-9006954 and DMS-9112150, respectively. The authors express their thanks to Mike Freedman, Dennis Hejhal, Al Marden, Curt McMullen, Burt Rodin, Steffen Rohde and Bill Thurston for conversations relating to this work. Also thanks are due to the referee, and to Steffen Rohde, for their careful reading and subsequent corrections. The paper of Sibner [Si3l served as a very useful introduction to the subject. I. Benjamini, O. Häggström (eds.), Selected Works of Oded Schramm, Selected Works in Probability and Statistics, DOI 10.1007/978-1-4419-9675-6_6, C Springer Science+Business Media, LLC 2011 105 370 z.-x. -

Geometric Representations of Graphs
1 Geometric Representations of Graphs Laszl¶ o¶ Lovasz¶ Institute of Mathematics EÄotvÄosLor¶andUniversity, Budapest e-mail: [email protected] December 11, 2009 2 Contents 0 Introduction 9 1 Planar graphs and polytopes 11 1.1 Planar graphs .................................... 11 1.2 Planar separation .................................. 15 1.3 Straight line representation and 3-polytopes ................... 15 1.4 Crossing number .................................. 17 2 Graphs from point sets 19 2.1 Unit distance graphs ................................ 19 2.1.1 The number of edges ............................ 19 2.1.2 Chromatic number and independence number . 20 2.1.3 Unit distance representation ........................ 21 2.2 Bisector graphs ................................... 24 2.2.1 The number of edges ............................ 24 2.2.2 k-sets and j-edges ............................. 27 2.3 Rectilinear crossing number ............................ 28 2.4 Orthogonality graphs ................................ 31 3 Harmonic functions on graphs 33 3.1 De¯nition and uniqueness ............................. 33 3.2 Constructing harmonic functions ......................... 35 3.2.1 Linear algebra ............................... 35 3.2.2 Random walks ............................... 36 3.2.3 Electrical networks ............................. 36 3.2.4 Rubber bands ................................ 37 3.2.5 Connections ................................. 37 4 Rubber bands 41 4.1 Rubber band representation ............................ 41 3 4 CONTENTS -

Effective Bisector Estimate with Application to Apollonian Circle
Effective bisector estimate with application to Apollonian circle packings Ilya Vinogradov1 October 29, 2018 arXiv:1204.5498v1 [math.NT] 24 Apr 2012 1Princeton University, Princeton, NJ Abstract Let Γ < PSL(2, C) be a geometrically finite non-elementary discrete subgroup, and let its critical exponent δ be greater than 1. We use representation theory of PSL(2, C) to prove an effective bisector counting theorem for Γ, which allows counting the number of points of Γ in general expanding regions in PSL(2, C) and provides an explicit error term. We apply this theorem to give power savings in the Apollonian circle packing problem and related counting problems. Contents 1. Introduction 2 1.1 Lattice point counting problem. 2 1.2 Sectorandbisectorcount. .. .. 2 1.3 Counting Γ-orbits in cones and hyperboloids. ... 3 1.4 Acknowledgements................................. 5 2. Statement of results 5 2.1 Bisectorcount. .................................. 5 2.2 Application to Apollonian circle packing problem. 9 3. Parametrization 11 3.1 The group G. ................................... 11 3.2 Hyperbolicspace.................................. 12 4. Line model 13 4.1 Complementary series for G............................ 13 4.2 Lie algebra of G. ................................. 13 4.3 Universal Enveloping Algebra of G........................ 13 4.4 K-typedecomposition. .............................. 14 4.5 Useful operators in g................................ 14 4.6 Normalizingoperators. .............................. 16 5. Automorphic model 18 5.1 Spectraldecomposition. ............................. 18 5.2 Patterson-Sullivantheory. 18 5.3 Lie algebra elements in KA+K coordinates. .................. 19 6. Decay of matrix coefficients 20 7. Proof of Theorem 2.1.2 21 7.1 Setup. ....................................... 21 7.2 Spectraldecomposition. ............................. 23 7.3 K-typedecomposition. .............................. 23 7.4 Mainterm. -

Cortical Surface Flattening: a Quasi-Conformal Approach Using Circle Packings
CORTICAL SURFACE FLATTENING: A QUASI-CONFORMAL APPROACH USING CIRCLE PACKINGS MONICA K. HURDAL1, KEN STEPHENSON2, PHILIP L. BOWERS1, DE WITT L. SUMNERS1, AND DAVID A. ROTTENBERG3;4 1Department of Mathematics, Florida State University, Tallahassee, FL 32306-4510, U.S.A. 2Department of Mathematics, University of Tennessee, Knoxville, TN 37996-1300, U.S.A. 3PET Imaging Center, VA Medical Center, Minneapolis, MN 55417, U.S.A. 4Departments of Neurology and Radiology, University of Minnesota, Minneapolis, MN 55455, U.S.A. Address for correspondence: Dr. Monica K. Hurdal, Department of Mathematics, Florida State University, Tallahassee, FL 32306-4510, U.S.A. Fax: (+1 850) 644-4053 Email: [email protected] Running Title: Quasi-Conformal Flat Maps From Circle Packings Key Words: circle packing; conformal map; cortical flat map; mapping; Riemann Mapping Theorem; surface flattening 1 Abstract Comparing the location and size of functional brain activity across subjects is difficult due to individual differences in folding patterns and functional foci are often buried within cortical sulci. Cortical flat mapping is a tool which can address these problems by taking advantage of the two-dimensional sheet topology of the cortical surface. Flat mappings of the cortex assist in simplifying complex information and may reveal spatial relationships in functional and anatomical data that were not previously apparent. Metric and areal flattening algorithms have been central to brain flattening efforts to date. However, it is mathematically impossible to flatten a curved surface in 3-space without introducing metric and areal distortion. Nevertheless, the Riemann Mapping Theorem of complex function theory implies that it is theoretically possible to preserve conformal (angular) information under flattening. -

Graphs in Nature
Graphs in Nature David Eppstein University of California, Irvine Algorithms and Data Structures Symposium (WADS) August 2019 Inspiration: Steinitz's theorem Purely combinatorial characterization of geometric objects: Graphs of convex polyhedra are exactly the 3-vertex-connected planar graphs Image: Kluka [2006] Overview Cracked surfaces, bubble foams, and crumpled paper also form natural graph-like structures What properties do these graphs have? How can we recognize and synthesize them? I. Cracks and Needles Motorcycle graphs: Canonical quad mesh partitioning Problem: partition irregular quad-mesh into regular submeshes [Eppstein et al. 2008] Inspiration: Light cycle game from TRON movies Mesh partitioning method Grow cut paths outwards from each irregular (non-degree-4) vertex Cut paths continue straight across regular (degree-4) vertices They stop when they run into another path Result: approximation to optimal partition (exact optimum is NP-complete) Mesh-free motorcycle graphs Earlier... Motorcycles move from initial points with given velocities When they hit trails of other motorcycles, they crash [Eppstein and Erickson 1999] Application of mesh-free motorcycle graphs Initially: A simplified model of the inward movement of reflex vertices in straight skeletons, a rectilinear variant of medial axes with applications including building roof construction, folding and cutting problems, surface interpolation, geographic analysis, and mesh construction Later: Subroutine for constructing straight skeletons of simple polygons [Cheng and Vigneron 2007; Huber and Held 2012] Image: Huber [2012] Construction of mesh-free motorcycle graphs Main ideas: Define asymmetric distance: Time when one motorcycle would crash into another's trail Repeatedly find closest pair and eliminate crashed motorcycle Image: Dancede [2011] O(n17=11+) [Eppstein and Erickson 1999] Improved to O(n4=3+) [Vigneron and Yan 2014] Additional log speedup using mutual nearest neighbors instead of closest pairs [Mamano et al. -

On Primal-Dual Circle Representations
On Primal-Dual Circle Representations Stefan Felsner∗ G¨unter Rote y The Koebe-Andreev-Thurston Circle Packing Theorem states that every triangulated planar graph has a circle-contact representation. The theorem has been generalized in various ways. The arguably most prominent generalization assures the existence of a primal-dual circle representation for every 3-connected planar graph. The aim of this note is to give a streamlined proof of this result. 1 Introduction For a 3-connected plane graph G = (V; E) with face set F , a primal-dual circle representation of G consists of two families of circles (Cx : x 2 V ) and (Dy : y 2 F ) such that: (i) The vertex-circles Cx have pairwise disjoint interiors. (ii) All face-circles Dy are contained in the circle Do corresponding to the outer face o, and all other face-circles have pairwise disjoint interiors. Moreover, for every edge xx0 2 E with dual edge yy0 (i. e., y and y0 are the two faces separated by xx0), the following holds: (iii) Circles Cx and Cx0 are tangent at a point p with tangent line txx0 . (iv) Circles Dy and Dy0 are tangent at the same point p with tangent line tyy0 . (v) The lines txx0 and tyy0 are orthogonal. Figure 1 shows an example. Theorem 1. Every 3-connected plane graph G admits a primal-dual circle representation. Moreover this representation is unique up to M¨obiustransformations. As a special case of this statement, G admits a circle packing representation: as a contact graph of nonoverlapping disks. The proof presented here combines ideas from an unpublished manuscript of Pulleyblank and Rote, from Brightwell and Scheinerman [5] and from Mohar [23]. -
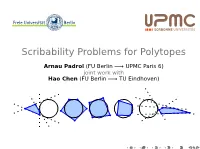
Scribability Problems for Polytopes
Scribability Problems for Polytopes Arnau Padrol (FU Berlin UPMC Paris 6) joint work with−! Hao Chen (FU Berlin TU Eindhoven) −! Scribability problems Scribability Problems Study realizability of polytopes when the position of their faces relative to the sphere is constrained. , Arnau Padrol (& Hao Chen) — NEG 2015 2 Classical scribability problems , Arnau Padrol (& Hao Chen) — NEG 2015 3 É Is every (3-dimensional) polytope inscribable? É If not, in which cases? É What about circumscribable? É What about other quadrics? Once upon a time... Systematische Entwickelung der Abhängigkeit geometrischer Gestalten von einander (1832) 77) Wenn irgend ein convexes Polyeder gegeben ist läßt sich dann immer (oder in welchen Fällen nur) irgend ein anderes, welches mit ihm in Hinsicht der Art und der Zusammensetzung der Grenzflächen übereinstimmt (oder von gleicher Gattung ist), in oder um eine Kugelfläche, oder in oder um irgend eine andere Fläche zweiten Jakob Steiner Grades beschreiben (d.h. daß seine Ecken (according to alle in dieser Fläche liegen oder seine Wikipedia) Grenzflächen alle diese Fläche berühren)? , Arnau Padrol (& Hao Chen) — NEG 2015 4 ...inscribable polytopes Systematische Entwickelung der Abhängigkeit geometrischer Gestalten von einander (1832) 77) Wenn irgend ein convexes Polyeder gegeben ist läßt sich dann immer (oder in welchen Fällen nur) irgend ein anderes, welches mit ihm in Hinsicht der Art und der Zusammensetzung der Grenzflächen übereinstimmt (oder von gleicher Gattung ist), in oder um eine Kugelfläche, oder in oder um