Photogrammetry App for Roughness Profile
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tablets in the Enterprise: Comparing the Total Cost of Ownership
TABLETS IN THE ENTERPRISE: COMPARING THE TOTAL COST OF OWNERSHIP EXECUTIVE SUMMARY Windows 8 tablets provide a PC experience, which for many workers is essential to maintaining productivity. With Windows 8, users can run familiar desktop applications, maintaining productivity without having to find new ways to carry out their tasks. They can read, edit, and print their emails and Office documents—tasks that can be a challenge on other tablets. In addition to these productivity advantages, Intel Core i5 processor and Windows 8 tablets can provide enterprises with total cost of ownership (TCO) savings of up to 18 percent compared to other tablets. We expect additional TCO savings with Intel Core vPro™ processor-based tablets due to their additional manageability capabilities. We estimate tablets with Intel Architecture and Windows 8 will have lower TCO than other tablets, primarily due to the following: reduced software costs lower management costs improved end-user productivity JANUARY 2013 A PRINCIPLED TECHNOLOGIES WHITE PAPER Commissioned by Intel Corp. TOTAL COST OF OWNERSHIP OF TABLETS IN THE ENTERPRISE In this paper, we first present a TCO analysis for a hypothetical enterprise considering four major categories of tablets for their employees: Microsoft Windows 8 tablets, Windows RT tablets, Android tablets, and Apple iPads. Because the ranges of prices and capabilities differ among models within each category, we selected a single representative model for each. Following this analysis, we discuss the dominant issues in enterprise tablet computing as of this writing. We base our TCO analysis on the primary assumptions in Figure 1. Tablets must be nine inches or larger with 64 GB of storage and Wi-Fi support. -

Surface Pro 3 Fact Sheet May 2014
Surface Pro 3 Fact sheet May 2014 Meet Surface Pro 3, the tablet that can replace your laptop. Wrapped in magnesium and loaded with a 12-inch ClearType Full HD display, 4th-generation Intel® Core™ processor and up to 8 GB of RAM in a sleek frame — just 0.36 inches thin and 1.76 pounds — with up to nine hours of Web-browsing battery life, Surface Pro 3 has all the power, performance and mobility of a laptop in an incredibly lightweight, versatile form. The thinnest and lightest member of the Surface Pro family, Surface Pro 3 features a large and beautiful 2160x1440 2K color-calibrated screen and 3:2 aspect ratio with multitouch input, so you can swipe, pinch and drag whenever you need. The improved optional Surface Pro Type Cover and more adjustable, continuous kickstand will transform your device experience from tablet to laptop in a snap. Surface Pro Type Cover features a double-fold hinge enabling you to magnetically lock it to the display’s lower bezel, keeping everything steady so you can work just as comfortably on your lap as you do at your desk. With a full-size USB 3.0 port, microSD card reader and Mini DisplayPort, you can quickly transfer files and easily connect peripherals like external displays. And with the optional Surface Ethernet Adapter, you can instantly connect your Surface to a wired Ethernet network with transfer rates of up to 1 Gbps1. The custom Surface Pen, crafted with a solid, polished aluminum finish, was designed to look and feel like an actual fountain pen to give you a natural writing experience. -

Surface Pro X Fact Sheet October 2020
Surface Pro X Fact Sheet October 2020 Meet the future of always-connected productivity. Wherever life leads you, be ready for anything with Surface Pro X. With blazing-fast Gigabit LTE connectivity,1 our thinnest Surface Pro features two USB-C® ports and a stunning, virtually edge-to-edge 13” touchscreen, plus choice of a new platinum finish and keyboard colors.2 What’s new? • Surface Pro X introduces the Microsoft SQ®2, the second generation of our custom chip on our premium configurations, building on the innovation of the Microsoft SQ® 1, delivering even more multi-tasking power for true connected productivity. • Surface Pro X is now available in a new Platinum finish in addition to Matte Black, and Surface Pro X Keyboards are now available in three new colors2: Ice Blue, Poppy Red, and Platinum, in addition to Black. • In addition to refreshing our top-end SKUs, additional software improvements will benefit all customers of Surface Pro X: o Increased battery life that now delivers up to 15 hours of typical usage.3 o Increasing number of key app partners are embracing Windows on ARM and taking advantage of the power and performance benefits of Microsoft SQ® 1 and Microsoft SQ® 2 and bringing new experiences for all Surface Pro X customers – current and new, including new Microsoft 365 applications4 optimized for Windows on ARM such as Microsoft Edge and Microsoft Teams which provides improved performance and reliability. o For developers, Visual Studio Code4 has updated and optimized for Windows on ARM. The new VS Code, paired with WSL2 and the Windows Terminal make Surface Pro X the ideal modern dev box. -

Surface Aspects of Pitting and Stress Corrosion Cracking
NASA CR-135212 SURFACE ASPECTS OF PITTING AND STRESS CORROSION CRACKING by J.J. Truhan, Jr. and R.F. Hehemann CASE WESTERN RESERVE UNIVERSITY Cleveland, Ohio Final Report for Period September 1974 to March 1977 Prepared for NATIONAL AERONAUTICS AND SPACE ADMINISTRATION NASA LEWIS RESEARCH CENTER Grant NCR 36-027-051 April 1977 NASA CR-135212 SURFACE ASPECTS OF PITTING AND STRESS CORROSION CRACKING by J.J. Truhan, Jr. and R.F. Hehemann CASE WESTERN RESERVE UNIVERSITY Cleveland, Ohio Final Report for Period September 1974 to March 1977 Prepared for NATIONAL AERONAUTICS AND SPACE ADMINISTRATION NASA LEWIS RESEARCH CENTER Grant NGR 36-027-051 April 1977 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. NASA CR-135212 4. Title and Subtitle 5. Report Date Surface Aspects of Pitting and Stress Corrosion Cracking 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. J. J. Truhan and R. F. Hehemarm 10. Work Unit No. 9. Performing Organization Name and Address Case Western Reserve University 11. Contract or Grant No. Cleveland, Ohio 44106 NCR 36-027-051 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Final Report 9/74 - 3/77 National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D.C. 20546 15. Supplementary Notes Project Managers, Charles W. Andrews and Hugh R. Gray Materials and Structures Division NASA, Lewis Research Center, Cleveland, Ohio 44135 16. Abstract The pitting and stress corrosion cracking of a stable austenitic stainless steel in aqueous chloride environments were investigated using a secondary ion mass spectrometer as the primary experimental technique. -

Surface Pro User Guide
Surface Pro User Guide Published: April 30, 2013 Version 1.01 © 2013 Microsoft. All rights reserved. BlueTrack Technology, ClearType, Excel, Hotmail, Internet Explorer, Microsoft, OneNote, Outlook, PowerPoint, SkyDrive, Windows, Xbox, and Xbox Live are registered trademarks of Microsoft Corporation. Surface, VaporMg, Skype, and Wedge are trademarks of Microsoft Corporation. Bluetooth is a registered trademark of Bluetooth SIG, Inc. This document is provided “as-is.” Information in this document, including URL and other Internet Web site references, may change without notice. © 2013 Microsoft Page ii Contents Meet Surface Pro ............................................................................................................................... 1 About this guide ........................................................................................................................... 1 Highlights ........................................................................................................................................ 2 What is Windows 8 Pro? ............................................................................................................ 4 Surface accessories ...................................................................................................................... 4 Setup ...................................................................................................................................................... 6 Plug in and turn on .................................................................................................................... -
Outlook Settings for POP and IMAP Access for Office 365 for Business Or Microsoft Exchange Accounts
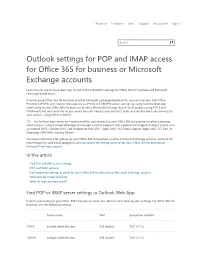
Products Templates Store Support My account Sign in Search Outlook settings for POP and IMAP access for Office 365 for business or Microsoft Exchange accounts Learn how to use Outlook Web App to find POP3 and IMAP4 settings for Office 365 for business and Microsoft Exchange-based email. If you’re using Office 365 for business or other Microsoft Exchange-based email, you can find your Post Office Protocol 3 (POP3) and Internet Message Access Protocol 4 (IMAP4) server settings by using Outlook Web App. Connecting to your Office 365 for business or other Microsoft Exchange-based email account using POP3 and IMAP4 only lets you send and receive email. You can’t access your contacts, tasks, or calendar when you connect to your account using POP3 or IMAP4. TIP For the best experience, we recommend that you connect to your Office 365 for business or other Exchange email account using Outlook Web App, or through an email program that supports Exchange ActiveSync access such as Outlook 2013, Outlook 2010, and Outlook for Mac 2011, Apple Mail 10.6 Snow Leopard, Apple Mail 10.7 Lion, or Entourage 2008 Web Services Edition. To review instructions for setting up your Office 365 for business or other Microsoft Exchange email on some of the most frequently used email programs, see Instructions for setting up email for your Office 365 for business or Microsoft Exchange account. In this article Find POP or IMAP server settings POP and IMAP options Instructions for setting up email for your Office 365 for business or Microsoft Exchange account What else do I need to know? What if I want to know more? Find POP or IMAP server settings in Outlook Web App If you’re connecting to your Office 365 for business email, you don’t need to look up your settings. -
Surface Pro and Surface Pro 2 User Guide with Windows 8.1 Pro Software
Surface Pro and Surface Pro 2 User Guide With Windows 8.1 Pro Software Published: March 2014 Version 2.0 © 2014 Microsoft. All rights reserved. BlueTrack Technology, ClearType, Excel, Hotmail, Internet Explorer, Microsoft, OneNote, Outlook, PowerPoint, OneDrive, Windows, Xbox, and Xbox Live are registered trademarks of Microsoft Corporation. Surface, Skype, and Wedge are trademarks of Microsoft Corporation. Bluetooth is a registered trademark of Bluetooth SIG, Inc. Dolby and the double-D symbol are registered trademarks of Dolby Laboratories. This document is provided “as-is.” Information in this document, including URL and other Internet Web site references, may change without notice. © 2014 Microsoft Page ii Contents MEET SURFACE PRO ........................................................................................................................................................1 ABOUT THIS GUIDE ................................................................................................................................................................................................ 1 SURFACE PRO FEATURES ....................................................................................................................................................................................... 2 SET UP YOUR SURFACE PRO ..........................................................................................................................................5 PLUG IN AND TURN ON ....................................................................................................................................................................................... -

Surface Book 3 Brochure
New Surface Book 3 for Business Powerhouse performance Adapts to you Surface Book 3 enables you to tackle complex technical and creative work in three modes. Robust laptop Tackle design and visualization tasks, or level up your machine learning models and create stunning visuals. Surface Book 3 renders video and motion graphics smoothly with the best graphics performance on any Surface laptop. Powerful tablet Show your work and share your view on a versatile, vibrant PixelSenseTM Display that supports touch, sketching and writing. When detached, Surface Book 3 15’’ is a large, powerful tablet running with Portable Studio Sketch and write on a portable digital canvas with blazing-fast graphics. Just detach, flip, and lower the screen. Then collaborate naturally with Surface Pen* and full Surface Dial* integration. Get the best of Microsoft Seamless integration with your favorite Microsoft 365 apps* and latest Windows 10 features. *Sold separately. Built for performance The best graphics All-day productivity and All the connections you performance on any Surface long battery life, among need, with USB-C® and laptop. Surface Book 3 the best of any current USB-A ports, full-size SD renders video and motion generation Surface device. card and optional Surface graphics smoothly and faster Work efficiently with Dock 2* for a single than ever, powered by up to features like Instant On connector to charge your 32 GB of RAM and up to 1TB and improved standby to devices, transfer your files, of SSD1 for lightning-fast, extend battery life when and display your videos pro-level storage. you’re away. -
Windows Surface RT Tablet Forensics
Windows Surface RT Tablet Forensics Asif Iqbal, Hanan AlObaidli, Andrew Marrington and Andy Jones Outline • Introduction • Problem statement • Research Question • Literature Review • Methodology • Acquisition • Analysis • Conclusion Windows Surface RT Tablet Forensics Asif Iqbal, Hanan AlObaidli, Andrew Marrington, Andy Jones Introduction • According to (Marturana, Me, Berte and Tacconi) (2011) and NIST (National Institute of Standards and Technology) it’s more likely that law enforcement will encounter a suspect with a mobile device in his/her possession than a PC or laptop. • Proximity and comparatively small capacity make these devices attractive "targets" for examination Windows Surface RT Tablet Forensics Asif Iqbal, Hanan AlObaidli, Andrew Marrington, Andy Jones Introduction: Problem Statement • Tablets and smart phones are heterogenous when compared to PCs • Many manufacturers, with significant differences in hardware and software • As opposed to "general purpose" PCs, OS often locked down and usage is constrained • How can we acquire and examine images from the plethora or different devices? Windows Surface RT Tablet Forensics Asif Iqbal, Hanan AlObaidli, Andrew Marrington, Andy Jones Introduction: Research Question • The aim of this research is to forensically investigate a Windows RT tablet (Surface RT) • The Research Questions that this research attempts to answer are as follow: • Question 1: How do we perform physical acquisition of the Windows RT tablet? • Question 2: What are the difficulties faced by the forensic investigator -
Download User Manual for Microsoft 10.8
Surface 3 User Guide With Windows 8.1 Published: June 2015 Version 2.0 © 2015 Microsoft. All rights reserved. BlueTrack Technology, ClearType, Excel, Hotmail, Internet Explorer, Microsoft, OneNote, Outlook, PowerPoint, OneDrive, Windows, Xbox, and Xbox Live are registered trademarks of Microsoft Corporation. Surface and Skype are trademarks of Microsoft Corporation. Bluetooth is a registered trademark of Bluetooth SIG, Inc. Dolby and the double-D symbol are registered trademarks of Dolby Laboratories. This document is provided “as-is.” Information in this document, including URL and other Internet website references, may change without notice. © 2015 Microsoft Page ii Contents Meet Surface 3 ................................................................................................................................................................. 1 SURFACE 3 FEATURES............................................................................................................................................................................................ 1 Set up your Surface 3 ...................................................................................................................................................... 4 The basics .......................................................................................................................................................................... 6 POWER AND CHARGING ...................................................................................................................................................................................... -

Sustainable Devices and Packaging Fiscal Year 2017
Sustainable Devices and Packaging Fiscal Year 2017 Microsoft Devices 1 Contents 1 Guiding Principles and Frameworks .............................................................................................. 4 Global Reporting Initiative ......................................................................................................... 5 Management System for Environmental Sustainability ......................................................... 5 The United Nations Sustainable Development Goals (SDGs) and indicators .................................... 7 2 Sustainability in devices design ........................................................................................................... 8 Life Cycle Thinking .................................................................................................................. 8 Design for Green .................................................................................................................... 8 Energy performance of Devices ............................................................................................. 9 Restricting the use of harmful substances ........................................................................... 11 Our approach to substance management ...................................................................................... 12 Ozone-depleting chemicals ................................................................................................. 13 Recycled Content ................................................................................................................. -

Windows RT 8.1, 10.6" LCD Touchscreen, 32GB Storage, 2GB Memory, Front and Rear Camera $579 Manufacturer Warranty New Lenovo G500 Notebook PC –
$499 Refurbished HP Elitebook 2740P Tablet $759 Notebook New Dell Inspiron 15R Notebook PC – Intel Core i5 3rd generation Intel Core i5-3337U 1.8GHz, 8GB 2.6GHZ DDR3, 1TB Hard Drive, DVDRW, 15.6 in. Display, 4GB Hard Drive Windows 8 - I15RM-5098SLV 160GB Hard Drive Manufacturer warranty DVDRW Win 7 Pro Installed Wi-Fi Webcam 1 Year Warranty $499 $559 New Microsoft Surface 2 32GB Tablet – Windows RT 8.1, 10.6" LCD Touchscreen, 32GB Storage, 2GB Memory, Front and Rear Camera $579 Manufacturer Warranty New Lenovo G500 Notebook PC – Intel Core i3 2.5GHZ, 4GB Memory, 500GB Hard Drive, 15.6" Display, Windows 8 64-bit Manufacturer warranty $579 Apple iPad Air 16GB $315 New Samsung Galaxy Tab 3 Internet Tablet – Android 4.1.2 OS, 7" Touchscreen, 1.2GHz Dual Core, 8GB Storage, MicroSD Slot, Bluetooth, Brown (SM- T210RGNYXAR) Manufacturer warranty Ipad 3/4 Open Box $445 New Samsung Galaxy Tab 3 Internet Tablet $529 – Android 4.2 OS, 10.1" Touchscreen, 16GB, Wi-Fi – Black or White 16GB Storage, 1.6GHz Intel Atom Processor, $599 Micro SD Slot, Built-in WiFi, Bluetooth, White (GT- P5210ZWYXAR) 32GB, Wi-Fi– Black or White Manufacturer Warranty Ipad Mini $799 Open Box Apple Imac A1311 All-in-One PC-24” LCD- $399 SilverRefurbished 16GB, Wi-Fi – Black or White Intel Core 2 Duo, 3.06GHz 529 4GB RAM 500GB Hard Drive 32GB, Wi-Fi– Black or White DVDRW Lion 10.7 Installed Manufacturer Warranty 1 Year Warranty $159 New DSi System-Red $629 New HP ProBook 4540s Notebook PC – 3rd generation Intel Core i3-3110M 2.4GHz, 4GB DDR3, 500GB Hard Drive, DVDRW, 15.6" Display,