An Introduction to Quantum Error Correction and Fault-Tolerant Quantum Computation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A New Family of Fault Tolerant Quantum Reed-Muller Codes
Clemson University TigerPrints All Theses Theses December 2020 A New Family of Fault Tolerant Quantum Reed-Muller Codes Harrison Beam Eggers Clemson University, [email protected] Follow this and additional works at: https://tigerprints.clemson.edu/all_theses Recommended Citation Eggers, Harrison Beam, "A New Family of Fault Tolerant Quantum Reed-Muller Codes" (2020). All Theses. 3463. https://tigerprints.clemson.edu/all_theses/3463 This Thesis is brought to you for free and open access by the Theses at TigerPrints. It has been accepted for inclusion in All Theses by an authorized administrator of TigerPrints. For more information, please contact [email protected]. A New Family of Fault Tolerant Quantum Reed-Muller Codes A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science Mathematics by Harrison Eggers December 2020 Accepted by: Dr. Felice Manganiello, Committee Chair Dr. Shuhong Gao Dr. Kevin James Abstract Fault tolerant quantum computation is a critical step in the development of practical quan- tum computers. Unfortunately, not every quantum error correcting code can be used for fault tolerant computation. Rengaswamy et. al. define CSS-T codes, which are CSS codes that admit the transversal application of the T gate, which is a key step in achieving fault tolerant computation. They then present a family of quantum Reed-Muller fault tolerant codes. Their family of codes admits a transversal T gate, but the asymptotic rate of the family is zero. We build on their work by reframing their CSS-T conditions using the concept of self-orthogonality. -
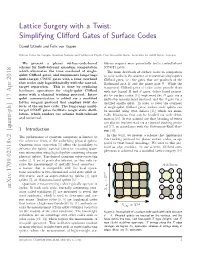
Lattice Surgery with a Twist: Simplifying Clifford Gates of Surface Codes
Lattice Surgery with a Twist: Simplifying Clifford Gates of Surface Codes Daniel Litinski and Felix von Oppen Dahlem Center for Complex Quantum Systems and Fachbereich Physik, Freie Universit¨at Berlin, Arnimallee 14, 14195 Berlin, Germany We present a planar surface-code-based bilizers requires more potentially faulty controlled-not scheme for fault-tolerant quantum computation (CNOT) gates. which eliminates the time overhead of single- The main drawback of surface codes in comparison qubit Clifford gates, and implements long-range to color codes is the absence of transversal single-qubit multi-target CNOT gates with a time overhead Clifford gates, i.e., the gates that are products of the that scales only logarithmically with the control- Hadamard gate H and the phase gate S. While the target separation. This is done by replacing transversal Clifford gates of color codes provide them hardware operations for single-qubit Clifford with fast logical H and S gates, defect-based propos- gates with a classical tracking protocol. Inter- als for surface codes [14] implement the H gate via a qubit communication is added via a modified multi-step measurement protocol, and the S gate via a lattice surgery protocol that employs twist de- distilled ancilla qubit. In order to lower the overhead fects of the surface code. The long-range multi- of single-qubit Clifford gates, surface code qubits can target CNOT gates facilitate magic state distil- be encoded using twist defects [15], which are essen- lation, which renders our scheme fault-tolerant tially Majoranas that can be braided via code defor- and universal. mation [16]. -

Fault-Tolerant Quantum Gates Ph/CS 219 2 February 2011
Fault-tolerant quantum gates Ph/CS 219 2 February 2011 Last time we considered the requirements for fault-tolerant quantum gates that act nontrivially on the codespace of a quantum error-correcting code. In the special case of a code that corrects t=1 error, the requirements are: -- if the gate gadget is ideal (has no faults) and its input is a codeword, then the gadget realizes the encoded operation U acting on the code space. -- if the gate gadget is ideal and its input has at most one error (is one-deviated from the codespace), then the output has at most one error in each output block. -- if the gate has one fault and its input has no errors, then the output has at most one error in each block (the errors are correctable). We considered the Clifford group, the finite subgroup of the m-qubit unitary group generated by the Hadamard gate H, the phase gate P (rotation by Pi/2 about the z-axis) and the CNOT gate. For a special class of codes, the generators of the Clifford group can be executed transversally (i.e., bitwise). The logical U can be done by applying a product of n U (or inverse of U) gates in parallel (where n is the code's length). If we suppose that the number of encoded qubits is k=1, then: -- the CNOT gate is transversal for any CSS code. -- the H gate is transversal for a CSS code that uses the same classical code to correct X errors and Z errors. -

Quantum Inductive Learning and Quantum Logic Synthesis
Portland State University PDXScholar Dissertations and Theses Dissertations and Theses 2009 Quantum Inductive Learning and Quantum Logic Synthesis Martin Lukac Portland State University Follow this and additional works at: https://pdxscholar.library.pdx.edu/open_access_etds Part of the Electrical and Computer Engineering Commons Let us know how access to this document benefits ou.y Recommended Citation Lukac, Martin, "Quantum Inductive Learning and Quantum Logic Synthesis" (2009). Dissertations and Theses. Paper 2319. https://doi.org/10.15760/etd.2316 This Dissertation is brought to you for free and open access. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of PDXScholar. For more information, please contact [email protected]. QUANTUM INDUCTIVE LEARNING AND QUANTUM LOGIC SYNTHESIS by MARTIN LUKAC A dissertation submitted in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY in ELECTRICAL AND COMPUTER ENGINEERING. Portland State University 2009 DISSERTATION APPROVAL The abstract and dissertation of Martin Lukac for the Doctor of Philosophy in Electrical and Computer Engineering were presented January 9, 2009, and accepted by the dissertation committee and the doctoral program. COMMITTEE APPROVALS: Irek Perkowski, Chair GarrisoH-Xireenwood -George ^Lendaris 5artM ?teven Bleiler Representative of the Office of Graduate Studies DOCTORAL PROGRAM APPROVAL: Malgorza /ska-Jeske7~Director Electrical Computer Engineering Ph.D. Program ABSTRACT An abstract of the dissertation of Martin Lukac for the Doctor of Philosophy in Electrical and Computer Engineering presented January 9, 2009. Title: Quantum Inductive Learning and Quantum Logic Synhesis Since Quantum Computer is almost realizable on large scale and Quantum Technology is one of the main solutions to the Moore Limit, Quantum Logic Synthesis (QLS) has become a required theory and tool for designing Quantum Logic Circuits. -

Arxiv:Quant-Ph/0002039V2 1 Aug 2000
Methodology for quantum logic gate construction 1,2 3,2 2 Xinlan Zhou ∗, Debbie W. Leung †, and Isaac L. Chuang ‡ 1 Department of Applied Physics, Stanford University, Stanford, California 94305-4090 2 IBM Almaden Research Center, 650 Harry Road, San Jose, California 95120 3 Quantum Entanglement Project, ICORP, JST Edward Ginzton Laboratory, Stanford University, Stanford, California 94305-4085 (October 29, 2018) We present a general method to construct fault-tolerant quantum logic gates with a simple primitive, which is an analog of quantum teleportation. The technique extends previous results based on traditional quantum teleportation (Gottesman and Chuang, Nature 402, 390, 1999) and leads to straightforward and systematic construction of many fault-tolerant encoded operations, including the π/8 and Toffoli gates. The technique can also be applied to the construction of remote quantum operations that cannot be directly performed. I. INTRODUCTION Practical realization of quantum information processing requires specific types of quantum operations that may be difficult to construct. In particular, to perform quantum computation robustly in the presence of noise, one needs fault-tolerant implementation of quantum gates acting on states that are block-encoded using quantum error correcting codes [1–4]. Fault-tolerant quantum gates must prevent propagation of single qubit errors to multiple qubits within any code block so that small correctable errors will not grow to exceed the correction capability of the code. This requirement greatly restricts the types of unitary operations that can be performed on the encoded qubits. Certain fault-tolerant operations can be implemented easily by performing direct transversal operations on the encoded qubits, in which each qubit in a block interacts only with one corresponding qubit, either in another block or in a specialized ancilla. -
![Arxiv:2104.09539V1 [Quant-Ph] 19 Apr 2021](https://docslib.b-cdn.net/cover/1825/arxiv-2104-09539v1-quant-ph-19-apr-2021-481825.webp)
Arxiv:2104.09539V1 [Quant-Ph] 19 Apr 2021
Practical quantum error correction with the XZZX code and Kerr-cat qubits Andrew S. Darmawan,1, 2 Benjamin J. Brown,3 Arne L. Grimsmo,3 David K. Tuckett,3 and Shruti Puri4, 5 1Yukawa Institute for Theoretical Physics (YITP), Kyoto University, Kitashirakawa Oiwakecho, Sakyo-ku, Kyoto 606-8502, Japan∗ 2JST, PRESTO, 4-1-8 Honcho, Kawaguchi, Saitama 332-0012, Japan 3Centre for Engineered Quantum Systems, School of Physics, University of Sydney, Sydney, New South Wales 2006, Australia 4 Department of Applied Physics, Yale University, New Haven, Connecticut 06511, USAy 5Yale Quantum Institute, Yale University, New Haven, Connecticut 06511, USA (Dated: April 21, 2021) The development of robust architectures capable of large-scale fault-tolerant quantum computa- tion should consider both their quantum error-correcting codes, and the underlying physical qubits upon which they are built, in tandem. Following this design principle we demonstrate remarkable error correction performance by concatenating the XZZX surface code with Kerr-cat qubits. We contrast several variants of fault-tolerant systems undergoing different circuit noise models that reflect the physics of Kerr-cat qubits. Our simulations show that our system is scalable below a threshold gate infidelity of pCX 6:5% within a physically reasonable parameter regime, where ∼ pCX is the infidelity of the noisiest gate of our system; the controlled-not gate. This threshold can be reached in a superconducting circuit architecture with a Kerr-nonlinearity of 10MHz, a 6:25 photon cat qubit, single-photon lifetime of > 64µs, and thermal photon population < 8%.∼ Such parameters are routinely achieved in superconducting∼ circuits. ∼ I. INTRODUCTION qubit [22, 34, 35]. -

Fault-Tolerant Interface Between Quantum Memories and Quantum Processors
ARTICLE DOI: 10.1038/s41467-017-01418-2 OPEN Fault-tolerant interface between quantum memories and quantum processors Hendrik Poulsen Nautrup 1, Nicolai Friis 1,2 & Hans J. Briegel1 Topological error correction codes are promising candidates to protect quantum computa- tions from the deteriorating effects of noise. While some codes provide high noise thresholds suitable for robust quantum memories, others allow straightforward gate implementation 1234567890 needed for data processing. To exploit the particular advantages of different topological codes for fault-tolerant quantum computation, it is necessary to be able to switch between them. Here we propose a practical solution, subsystem lattice surgery, which requires only two-body nearest-neighbor interactions in a fixed layout in addition to the indispensable error correction. This method can be used for the fault-tolerant transfer of quantum information between arbitrary topological subsystem codes in two dimensions and beyond. In particular, it can be employed to create a simple interface, a quantum bus, between noise resilient surface code memories and flexible color code processors. 1 Institute for Theoretical Physics, University of Innsbruck, Technikerstr. 21a, 6020 Innsbruck, Austria. 2 Institute for Quantum Optics and Quantum Information, Austrian Academy of Sciences, Boltzmanngasse 3, 1090 Vienna, Austria. Correspondence and requests for materials should be addressed to H.P.N. (email: [email protected]) NATURE COMMUNICATIONS | 8: 1321 | DOI: 10.1038/s41467-017-01418-2 | www.nature.com/naturecommunications 1 ARTICLE NATURE COMMUNICATIONS | DOI: 10.1038/s41467-017-01418-2 oise and decoherence can be considered as the major encoding k = n − s qubits. We denote the normalizer of S by Nobstacles for large-scale quantum information processing. -

Quantum Error-Correcting Codes by Concatenation QEC11
Quantum Error-Correcting Codes by Concatenation QEC11 Second International Conference on Quantum Error Correction University of Southern California, Los Angeles, USA December 5–9, 2011 Quantum Error-Correcting Codes by Concatenation Markus Grassl joint work with Bei Zeng Centre for Quantum Technologies National University of Singapore Singapore Markus Grassl – 1– 07.12.2011 Quantum Error-Correcting Codes by Concatenation QEC11 Why Bei isn’t here Jonathan, November 24, 2011 Markus Grassl – 2– 07.12.2011 Quantum Error-Correcting Codes by Concatenation QEC11 Overview Shor’s nine-qubit code revisited • The code [[25, 1, 9]] • Concatenated graph codes • Generalized concatenated quantum codes • Codes for the Amplitude Damping (AD) channel • Conclusions • Markus Grassl – 3– 07.12.2011 Quantum Error-Correcting Codes by Concatenation QEC11 Shor’s Nine-Qubit Code Revisited Bit-flip code: 0 000 , 1 111 . | → | | → | Phase-flip code: 0 + ++ , 1 . | → | | → | − −− Effect of single-qubit errors on the bit-flip code: X-errors change the basis states, but can be corrected • Z-errors at any of the three positions: • Z 000 = 000 | | “encoded” Z-operator Z 111 = 111 | −| = Bit-flip code & error correction convert the channel into a phase-error ⇒ channel = Concatenation of bit-flip code and phase-flip code yields [[9, 1, 3]] ⇒ Markus Grassl – 4– 07.12.2011 Quantum Error-Correcting Codes by Concatenation QEC11 The Code [[25, 1, 9]] The best single-error correcting code is = [[5, 1, 3]] • C0 Re-encoding each of the 5 qubits with yields = [[52, 1, 32]] -

Realization of the Quantum Toffoli Gate
Realization of the quantum Toffoli gate Realization of the quantum Toffoli gate Based on: Monz, T; Kim, K; Haensel, W; et al Realization of the quantum Toffoli gate with trapped ions Phys. Rev. Lett. 102, 040501 (2009) Lanyon, BP; Barbieri, M; Almeida, MP; et al. Simplifying quantum logic using higher dimensional Hilbert spaces Nat. Phys. 5, 134 (2009) Realization of the quantum Toffoli gate Outline 1. Motivation 2. Principles of the quantum Toffoli gate 3. Implementation with trapped ions 4. Implementation with photons 5. Comparison and conclusion 6. Summary 6. Dezember 2010 Jakob Buhmann Jeffrey Gehrig 1 Realization of the quantum Toffoli gate 1. Motivation • Universal quantum logic gate sets are needed to implement algorithms • Implementation of algorithms is difficult due to the finite fidelity and large amount of gates • Use of other degrees of freedom to store information • Reduction of complexity and runtime 6. Dezember 2010 Jakob Buhmann Jeffrey Gehrig 2 Realization of the quantum Toffoli gate 2. Principles of the Toffoli gate • Three-qubit gate (C1, C2, T) • Logic flip of T depending on (C1 AND C2) Truth table Matrix form Input Output C1 C2 T C1 C2 T 0 0 0 0 0 0 0 0 1 0 0 1 0 1 0 0 1 0 0 1 1 0 1 1 1 0 0 1 0 0 1 0 1 1 0 1 1 1 0 1 1 1 1 1 1 1 1 0 6. Dezember 2010 Jakob Buhmann Jeffrey Gehrig 3 Realization of the quantum Toffoli gate 2. Principles of the Toffoli gate • Qubit Implementation • Qutrit Implementation Qutrit states: and 6. -
Machine Learning for Designing Fast Quantum Gates
University of Calgary PRISM: University of Calgary's Digital Repository Graduate Studies The Vault: Electronic Theses and Dissertations 2016-01-26 Machine Learning for Designing Fast Quantum Gates Zahedinejad, Ehsan Zahedinejad, E. (2016). Machine Learning for Designing Fast Quantum Gates (Unpublished doctoral thesis). University of Calgary, Calgary, AB. doi:10.11575/PRISM/26805 http://hdl.handle.net/11023/2780 doctoral thesis University of Calgary graduate students retain copyright ownership and moral rights for their thesis. You may use this material in any way that is permitted by the Copyright Act or through licensing that has been assigned to the document. For uses that are not allowable under copyright legislation or licensing, you are required to seek permission. Downloaded from PRISM: https://prism.ucalgary.ca UNIVERSITY OF CALGARY Machine Learning for Designing Fast Quantum Gates by Ehsan Zahedinejad A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY GRADUATE PROGRAM IN PHYSICS AND ASTRONOMY CALGARY, ALBERTA January, 2016 c Ehsan Zahedinejad 2016 Abstract Fault-tolerant quantum computing requires encoding the quantum information into logical qubits and performing the quantum information processing in a code-space. Quantum error correction codes, then, can be employed to diagnose and remove the possible errors in the quantum information, thereby avoiding the loss of information. Although a series of single- and two-qubit gates can be employed to construct a quan- tum error correcting circuit, however this decomposition approach is not practically desirable because it leads to circuits with long operation times. An alternative ap- proach to designing a fast quantum circuit is to design quantum gates that act on a multi-qubit gate. -

Graphical and Programming Support for Simulations of Quantum Computations
AGH University of Science and Technology in Kraków Faculty of Computer Science, Electronics and Telecommunications Institute of Computer Science Master of Science Thesis Graphical and programming support for simulations of quantum computations Joanna Patrzyk Supervisor: dr inż. Katarzyna Rycerz Kraków 2014 OŚWIADCZENIE AUTORA PRACY Oświadczam, świadoma odpowiedzialności karnej za poświadczenie nieprawdy, że niniejszą pracę dyplomową wykonałam osobiście i samodzielnie, i nie korzystałam ze źródeł innych niż wymienione w pracy. ................................... PODPIS Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Informatyki, Elektroniki i Telekomunikacji Katedra Informatyki Praca Magisterska Graficzne i programowe wsparcie dla symulacji obliczeń kwantowych Joanna Patrzyk Opiekun: dr inż. Katarzyna Rycerz Kraków 2014 Acknowledgements I would like to express my sincere gratitude to my supervisor, Dr Katarzyna Rycerz, for the continuous support of my M.Sc. study, for her patience, motivation, enthusiasm, and immense knowledge. Her guidance helped me a lot during my research and writing of this thesis. I would also like to thank Dr Marian Bubak, for his suggestions and valuable advices, and for provision of the materials used in this study. I would also thank Dr Włodzimierz Funika and Dr Maciej Malawski for their support and constructive remarks concerning the QuIDE simulator. My special thank goes to Bartłomiej Patrzyk for the encouragement, suggestions, ideas and a great support during this study. Abstract The field of Quantum Computing is recently rapidly developing. However before it transits from the theory into practical solutions, there is a need for simulating the quantum computations, in order to analyze them and investigate their possible applications. Today, there are many software tools which simulate quantum computers. -
![Arxiv:2003.09412V2 [Quant-Ph] 7 Jul 2021 Hadamard-Free Circuits Expose the Structure of the Clifford Group](https://docslib.b-cdn.net/cover/5281/arxiv-2003-09412v2-quant-ph-7-jul-2021-hadamard-free-circuits-expose-the-structure-of-the-clifford-group-935281.webp)
Arxiv:2003.09412V2 [Quant-Ph] 7 Jul 2021 Hadamard-Free Circuits Expose the Structure of the Clifford Group
Hadamard-free circuits expose the structure of the Clifford group Sergey Bravyi and Dmitri Maslov IBM T. J. Watson Research Center, Yorktown Heights, NY 10598, USA July 8, 2021 Abstract The Clifford group plays a central role in quantum randomized benchmarking, quantum tomography, and error correction protocols. Here we study the structural properties of this group. We show that any Clifford operator can be uniquely written in the canonical form F1HSF2, where H is a layer of Hadamard gates, S is a permutation of qubits, and Fi are parameterized Hadamard-free circuits chosen from suitable subgroups of the Clifford group. Our canonical form provides a one-to-one correspondence between Clifford operators and layered quantum circuits. We report a polynomial-time algorithm for computing the canonical form. We employ this canonical form to generate a random uniformly distributed n-qubit Clifford operator in runtime O(n2). The number of random bits consumed by the algorithm matches the information-theoretic lower bound. A surprising connection is highlighted between random uniform Clifford operators and the Mallows distribution on the symmetric group. The variants of the canonical form, one with a short Hadamard- free part and one allowing a circuit depth 9n implementation of arbitrary Clifford unitaries in the Linear Nearest Neighbor architecture are also discussed. Finally, we study computational quantum advantage where a classical reversible linear circuit can be implemented more efficiently using Clifford gates, and show an explicit example where such an advantage takes place. 1 Introduction Clifford circuits can be defined as quantum computations by the circuits with Phase (p), Hadamard (h), and cnot gates, applied to a computational basis state, such as |00...0i.