5 Sorting and Selection If Key(E) Key(E )
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sort Algorithms 15-110 - Friday 2/28 Learning Objectives
Sort Algorithms 15-110 - Friday 2/28 Learning Objectives • Recognize how different sorting algorithms implement the same process with different algorithms • Recognize the general algorithm and trace code for three algorithms: selection sort, insertion sort, and merge sort • Compute the Big-O runtimes of selection sort, insertion sort, and merge sort 2 Search Algorithms Benefit from Sorting We use search algorithms a lot in computer science. Just think of how many times a day you use Google, or search for a file on your computer. We've determined that search algorithms work better when the items they search over are sorted. Can we write an algorithm to sort items efficiently? Note: Python already has built-in sorting functions (sorted(lst) is non-destructive, lst.sort() is destructive). This lecture is about a few different algorithmic approaches for sorting. 3 Many Ways of Sorting There are a ton of algorithms that we can use to sort a list. We'll use https://visualgo.net/bn/sorting to visualize some of these algorithms. Today, we'll specifically discuss three different sorting algorithms: selection sort, insertion sort, and merge sort. All three do the same action (sorting), but use different algorithms to accomplish it. 4 Selection Sort 5 Selection Sort Sorts From Smallest to Largest The core idea of selection sort is that you sort from smallest to largest. 1. Start with none of the list sorted 2. Repeat the following steps until the whole list is sorted: a) Search the unsorted part of the list to find the smallest element b) Swap the found element with the first unsorted element c) Increment the size of the 'sorted' part of the list by one Note: for selection sort, swapping the element currently in the front position with the smallest element is faster than sliding all of the numbers down in the list. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4]has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) In Bubble sort, Selection sort and Insertion sort, the O(N ) time time complexity that limits its usefulness to small number of complexity limits the performance when N gets very big. element no more than a few thousand data points. -

Radix Sort Comparison Sort Runtime of O(N*Log(N)) Is Optimal
Radix Sort Comparison sort runtime of O(n*log(n)) is optimal • The problem of sorting cannot be solved using comparisons with less than n*log(n) time complexity • See Proposition I in Chapter 2.2 of the text How can we sort without comparison? • Consider the following approach: • Look at the least-significant digit • Group numbers with the same digit • Maintain relative order • Place groups back in array together • I.e., all the 0’s, all the 1’s, all the 2’s, etc. • Repeat for increasingly significant digits The characteristics of Radix sort • Least significant digit (LSD) Radix sort • a fast stable sorting algorithm • begins at the least significant digit (e.g. the rightmost digit) • proceeds to the most significant digit (e.g. the leftmost digit) • lexicographic orderings Generally Speaking • 1. Take the least significant digit (or group of bits) of each key • 2. Group the keys based on that digit, but otherwise keep the original order of keys. • This is what makes the LSD radix sort a stable sort. • 3. Repeat the grouping process with each more significant digit Generally Speaking public static void sort(String [] a, int W) { int N = a.length; int R = 256; String [] aux = new String[N]; for (int d = W - 1; d >= 0; --d) { aux = sorted array a by the dth character a = aux } } A Radix sort example A Radix sort example A Radix sort example • Problem: How to ? • Group the keys based on that digit, • but otherwise keep the original order of keys. Key-indexed counting • 1. Take the least significant digit (or group of bits) of each key • 2. -
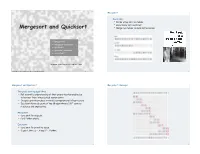
Mergesort and Quicksort ! Merge Two Halves to Make Sorted Whole
Mergesort Basic plan: ! Divide array into two halves. ! Recursively sort each half. Mergesort and Quicksort ! Merge two halves to make sorted whole. • mergesort • mergesort analysis • quicksort • quicksort analysis • animations Reference: Algorithms in Java, Chapters 7 and 8 Copyright © 2007 by Robert Sedgewick and Kevin Wayne. 1 3 Mergesort and Quicksort Mergesort: Example Two great sorting algorithms. ! Full scientific understanding of their properties has enabled us to hammer them into practical system sorts. ! Occupy a prominent place in world's computational infrastructure. ! Quicksort honored as one of top 10 algorithms of 20th century in science and engineering. Mergesort. ! Java sort for objects. ! Perl, Python stable. Quicksort. ! Java sort for primitive types. ! C qsort, Unix, g++, Visual C++, Python. 2 4 Merging Merging. Combine two pre-sorted lists into a sorted whole. How to merge efficiently? Use an auxiliary array. l i m j r aux[] A G L O R H I M S T mergesort k mergesort analysis a[] A G H I L M quicksort quicksort analysis private static void merge(Comparable[] a, Comparable[] aux, int l, int m, int r) animations { copy for (int k = l; k < r; k++) aux[k] = a[k]; int i = l, j = m; for (int k = l; k < r; k++) if (i >= m) a[k] = aux[j++]; merge else if (j >= r) a[k] = aux[i++]; else if (less(aux[j], aux[i])) a[k] = aux[j++]; else a[k] = aux[i++]; } 5 7 Mergesort: Java implementation of recursive sort Mergesort analysis: Memory Q. How much memory does mergesort require? A. Too much! public class Merge { ! Original input array = N. -
Sorting Algorithms Correcness, Complexity and Other Properties
Sorting Algorithms Correcness, Complexity and other Properties Joshua Knowles School of Computer Science The University of Manchester COMP26912 - Week 9 LF17, April 1 2011 The Importance of Sorting Important because • Fundamental to organizing data • Principles of good algorithm design (correctness and efficiency) can be appreciated in the methods developed for this simple (to state) task. Sorting Algorithms 2 LF17, April 1 2011 Every algorithms book has a large section on Sorting... Sorting Algorithms 3 LF17, April 1 2011 ...On the Other Hand • Progress in computer speed and memory has reduced the practical importance of (further developments in) sorting • quicksort() is often an adequate answer in many applications However, you still need to know your way (a little) around the the key sorting algorithms Sorting Algorithms 4 LF17, April 1 2011 Overview What you should learn about sorting (what is examinable) • Definition of sorting. Correctness of sorting algorithms • How the following work: Bubble sort, Insertion sort, Selection sort, Quicksort, Merge sort, Heap sort, Bucket sort, Radix sort • Main properties of those algorithms • How to reason about complexity — worst case and special cases Covered in: the course book; labs; this lecture; wikipedia; wider reading Sorting Algorithms 5 LF17, April 1 2011 Relevant Pages of the Course Book Selection sort: 97 (very short description only) Insertion sort: 98 (very short) Merge sort: 219–224 (pages on multi-way merge not needed) Heap sort: 100–106 and 107–111 Quicksort: 234–238 Bucket sort: 241–242 Radix sort: 242–243 Lower bound on sorting 239–240 Practical issues, 244 Some of the exercise on pp. -

Overview Parallel Merge Sort
CME 323: Distributed Algorithms and Optimization, Spring 2015 http://stanford.edu/~rezab/dao. Instructor: Reza Zadeh, Matriod and Stanford. Lecture 4, 4/6/2016. Scribed by Henry Neeb, Christopher Kurrus, Andreas Santucci. Overview Today we will continue covering divide and conquer algorithms. We will generalize divide and conquer algorithms and write down a general recipe for it. What's nice about these algorithms is that they are timeless; regardless of whether Spark or any other distributed platform ends up winning out in the next decade, these algorithms always provide a theoretical foundation for which we can build on. It's well worth our understanding. • Parallel merge sort • General recipe for divide and conquer algorithms • Parallel selection • Parallel quick sort (introduction only) Parallel selection involves scanning an array for the kth largest element in linear time. We then take the core idea used in that algorithm and apply it to quick-sort. Parallel Merge Sort Recall the merge sort from the prior lecture. This algorithm sorts a list recursively by dividing the list into smaller pieces, sorting the smaller pieces during reassembly of the list. The algorithm is as follows: Algorithm 1: MergeSort(A) Input : Array A of length n Output: Sorted A 1 if n is 1 then 2 return A 3 end 4 else n 5 L mergeSort(A[0, ..., 2 )) n 6 R mergeSort(A[ 2 , ..., n]) 7 return Merge(L, R) 8 end 1 Last lecture, we described one way where we can take our traditional merge operation and translate it into a parallelMerge routine with work O(n log n) and depth O(log n). -

Data Structures & Algorithms
DATA STRUCTURES & ALGORITHMS Tutorial 6 Questions SORTING ALGORITHMS Required Questions Question 1. Many operations can be performed faster on sorted than on unsorted data. For which of the following operations is this the case? a. checking whether one word is an anagram of another word, e.g., plum and lump b. findin the minimum value. c. computing an average of values d. finding the middle value (the median) e. finding the value that appears most frequently in the data Question 2. In which case, the following sorting algorithm is fastest/slowest and what is the complexity in that case? Explain. a. insertion sort b. selection sort c. bubble sort d. quick sort Question 3. Consider the sequence of integers S = {5, 8, 2, 4, 3, 6, 1, 7} For each of the following sorting algorithms, indicate the sequence S after executing each step of the algorithm as it sorts this sequence: a. insertion sort b. selection sort c. heap sort d. bubble sort e. merge sort Question 4. Consider the sequence of integers 1 T = {1, 9, 2, 6, 4, 8, 0, 7} Indicate the sequence T after executing each step of the Cocktail sort algorithm (see Appendix) as it sorts this sequence. Advanced Questions Question 5. A variant of the bubble sorting algorithm is the so-called odd-even transposition sort . Like bubble sort, this algorithm a total of n-1 passes through the array. Each pass consists of two phases: The first phase compares array[i] with array[i+1] and swaps them if necessary for all the odd values of of i. -

13 Basic Sorting Algorithms
Concise Notes on Data Structures and Algorithms Basic Sorting Algorithms 13 Basic Sorting Algorithms 13.1 Introduction Sorting is one of the most fundamental and important data processing tasks. Sorting algorithm: An algorithm that rearranges records in lists so that they follow some well-defined ordering relation on values of keys in each record. An internal sorting algorithm works on lists in main memory, while an external sorting algorithm works on lists stored in files. Some sorting algorithms work much better as internal sorts than external sorts, but some work well in both contexts. A sorting algorithm is stable if it preserves the original order of records with equal keys. Many sorting algorithms have been invented; in this chapter we will consider the simplest sorting algorithms. In our discussion in this chapter, all measures of input size are the length of the sorted lists (arrays in the sample code), and the basic operation counted is comparison of list elements (also called keys). 13.2 Bubble Sort One of the oldest sorting algorithms is bubble sort. The idea behind it is to make repeated passes through the list from beginning to end, comparing adjacent elements and swapping any that are out of order. After the first pass, the largest element will have been moved to the end of the list; after the second pass, the second largest will have been moved to the penultimate position; and so forth. The idea is that large values “bubble up” to the top of the list on each pass. A Ruby implementation of bubble sort appears in Figure 1. -

Lecture 16: Lower Bounds for Sorting
Lecture Notes CMSC 251 To bound this, recall the integration formula for bounding summations (which we paraphrase here). For any monotonically increasing function f(x) Z Xb−1 b f(i) ≤ f(x)dx: i=a a The function f(x)=xln x is monotonically increasing, and so we have Z n S(n) ≤ x ln xdx: 2 If you are a calculus macho man, then you can integrate this by parts, and if you are a calculus wimp (like me) then you can look it up in a book of integrals Z n 2 2 n 2 2 2 2 x x n n n n x ln xdx = ln x − = ln n − − (2 ln 2 − 1) ≤ ln n − : 2 2 4 x=2 2 4 2 4 This completes the summation bound, and hence the entire proof. Summary: So even though the worst-case running time of QuickSort is Θ(n2), the average-case running time is Θ(n log n). Although we did not show it, it turns out that this doesn’t just happen much of the time. For large values of n, the running time is Θ(n log n) with high probability. In order to get Θ(n2) time the algorithm must make poor choices for the pivot at virtually every step. Poor choices are rare, and so continuously making poor choices are very rare. You might ask, could we make QuickSort deterministic Θ(n log n) by calling the selection algorithm to use the median as the pivot. The answer is that this would work, but the resulting algorithm would be so slow practically that no one would ever use it. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4] has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) time In Bubble sort, Selection sort and Insertion sort, the O(N ) time complexity that limits its usefulness to small number of element complexity limits the performance when N gets very big. no more than a few thousand data points. -

Heapsort Vs. Quicksort
Heapsort vs. Quicksort Most groups had sound data and observed: – Random problem instances • Heapsort runs perhaps 2x slower on small instances • It’s even slower on larger instances – Nearly-sorted instances: • Quicksort is worse than Heapsort on large instances. Some groups counted comparisons: • Heapsort uses more comparisons on random data Most groups concluded: – Experiments show that MH2 predictions are correct • At least for random data 1 CSE 202 - Dynamic Programming Sorting Random Data N Time (us) Quicksort Heapsort 10 19 21 100 173 293 1,000 2,238 5,289 10,000 28,736 78,064 100,000 355,949 1,184,493 “HeapSort is definitely growing faster (in running time) than is QuickSort. ... This lends support to the MH2 model.” Does it? What other explanations are there? 2 CSE 202 - Dynamic Programming Sorting Random Data N Number of comparisons Quicksort Heapsort 10 54 56 100 987 1,206 1,000 13,116 18,708 10,000 166,926 249,856 100,000 2,050,479 3,136,104 But wait – the number of comparisons for Heapsort is also going up faster that for Quicksort. This has nothing to do with the MH2 analysis. How can we see if MH2 analysis is relevant? 3 CSE 202 - Dynamic Programming Sorting Random Data N Time (us) Compares Time / compare (ns) Quicksort Heapsort Quicksort Heapsort Quicksort Heapsort 10 19 21 54 56 352 375 100 173 293 987 1,206 175 243 1,000 2,238 5,289 13,116 18,708 171 283 10,000 28,736 78,064 166,926 249,856 172 312 100,000 355,949 1,184,493 2,050,479 3,136,104 174 378 Nice data! – Why does N = 10 take so much longer per comparison? – Why does Heapsort always take longer than Quicksort? – Is Heapsort growth as predicted by MH2 model? • Is N large enough to be interesting?? (Machine is a Sun Ultra 10) 4 CSE 202 - Dynamic Programming .. -
Selected Sorting Algorithms
Selected Sorting Algorithms CS 165: Project in Algorithms and Data Structures Michael T. Goodrich Some slides are from J. Miller, CSE 373, U. Washington Why Sorting? • Practical application – People by last name – Countries by population – Search engine results by relevance • Fundamental to other algorithms • Different algorithms have different asymptotic and constant-factor trade-offs – No single ‘best’ sort for all scenarios – Knowing one way to sort just isn’t enough • Many to approaches to sorting which can be used for other problems 2 Problem statement There are n comparable elements in an array and we want to rearrange them to be in increasing order Pre: – An array A of data records – A value in each data record – A comparison function • <, =, >, compareTo Post: – For each distinct position i and j of A, if i < j then A[i] ≤ A[j] – A has all the same data it started with 3 Insertion sort • insertion sort: orders a list of values by repetitively inserting a particular value into a sorted subset of the list • more specifically: – consider the first item to be a sorted sublist of length 1 – insert the second item into the sorted sublist, shifting the first item if needed – insert the third item into the sorted sublist, shifting the other items as needed – repeat until all values have been inserted into their proper positions 4 Insertion sort • Simple sorting algorithm. – n-1 passes over the array – At the end of pass i, the elements that occupied A[0]…A[i] originally are still in those spots and in sorted order.