The Statistical Mechanics of Stretched Polymers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Analogies in Polymer Physics
Crimson Publishers Opinion Wings to the Research Analogies in Polymer Physics Sergey Panyukov* P N Lebedev Physics Institute, Russian Academy of Sciences, Russia Opinion Traditional methods for describing long polymer chains are so different from classical solid-state physics methods that it is difficult for scientists from different fields to find a seminar, Academician Ginzburg (not yet a Nobel laureate) got up and left the room: “This is common language. When I reported on my first work on polymer physics at a general physical not physics”. “Phew, what a nasty thing!”-this was a short commentary on another polymer work of the well-known theoretical physicist in the solid-state field. Of course, practical needs and the very time have somewhat changed the attitude towards the physics of polymers. But and slang of other areas of physics. even now, the best way to bury your work in polymer physics is to directly use the methods *Corresponding author: Sergey in elegant (or not so) analytical formulas, are replaced by the charts generated by computer Over the past fifty years, the methods of physics have changed a lot. New ideas, packaged simulations for carefully selected system parameters. People have learned to simulate RussiaPanyukov, P N Lebedev Physics Institute, Russian Academy of Sciences, Moscow, anything if they can allocate enough money for new computer clusters. But unfortunately, this Submission: does not always give a deeper understanding of physics, for which it is traditionally sufficient Published: July 06, 2020 to formulate a simplified model of a “spherical horse in a vacuum”. Complicate is simple, July 15, 2020 simplify is difficult, as Meyer’s law states. -
Polymer and Softmatter Physics
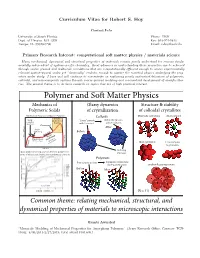
Curriculum Vitae for Robert S. Hoy Contact Info University of South Florida Phone: TBD Dept. of Physics, ISA 4209 Fax: 813-974-5813 Tampa, FL 33620-5700 Email: [email protected] Primary Research Interest: computational soft matter physics / materials science Many mechanical, dynamical and structural properties of materials remain poorly understood for reasons funda- mentally independent of system-specific chemistry. Great advances in understanding these properties can be achieved through coarse-grained and multiscale simulations that are computationally efficient enough to access experimentally relevant spatiotemporal scales yet \chemically" realistic enough to capture the essential physics underlying the prop- erties under study. I have and will continue to concentrate on explaining poorly-understood behaviors of polymeric, colloidal, and nanocomposite systems through coarse-grained modeling and concomitant development of analytic theo- ries. The general theme is to do basic research on topics that are of high practical interest. Polymer and So Matter Physics Mechanics of Glassy dynamics Structure & stability Polymeric Solids of crystallization of colloidal crystallites Mechanical Response of Ductile Polymers Colloids Maximally contacting Most compact %%%%'..3$;, %%!"#$%& <4%#3)*..% “Loose” particle Slides into groove, "$-)/)'*0+ ,,,:#6"=# (1$$2(%#1 with 1 contact adds 3 contacts !"#$$#%&"$' After %%&'")*+ &03'$+*+4 : Before 6").'#"$ )$.7#,8,9 !"#$%&'"$(( ,,,2*3("4, '$()*"+,-$./ 5(3%#4"46& VWUHVV DŽ 1 0$./ %%"$-)/)'*0+% Most symmetric Least -
Introduction to Polymer Physics
Ulrich Eisele Introduction to Polymer Physics With 148 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo HongKong Table of Contents Part I The Mechanics of Linear Deformation of Polymers 1 Object and Aims of Polymer Physics 3 2 Mechanical Relaxation in Polymers 5 2.1 Basic Continuum Mechanics S 2.1.1 Stress and Strain Tensors 5 2.1.2 Basic Laws of Continuum Mechanics 5 2.2 Relaxation and Creep Experiments on Polymers 8 2.2.1 Creep Experiment 8 2.2.2 Relaxation Experiment 9 2.2.3 Basic Law for Relaxation and Creep 10 2.3 Dynamic Relaxation Experiments 11 2.4 Technical Measures for Damping 12 2.4.1 Energy Dissipation Under Defined Load Conditions ! 12 2.4.2 Rebound Elasticity 15 3 Simple Phenomenological Models 17 3.1 Maxwell's Model 17 3.2 Kelvin-Voigt Model 18 3.3 Relaxation and Retardation Spectra 20 3.4 Approximate Determination of Relaxation Spectra 22 3.4.1 Method of Schwarzl and Stavermann 22 3.4.2 Method According to Ferry and Williams 24 4 Molecular Models of Relaxation Behavior 26 4.1 Simple Jump Model 26 4.2 Change of Position in Terms of a Potential Model 27 4.3 Viscosity in Terms of the Simple Jump Model 29 4.4 Determining the Energy of Activation by Experiment 30 4.5 Kink Model 32 5 Glass Transition 35 5.1 Thermodynamic Description 35 5.2 Free Volume Theory 36 5.3 Williams, Landel and Ferry Relationship 38 5.4 Time-Temperature Superposition Principle 40 5.5 Increment Method for the Determination of the Glass Transition Temperature 43 VIII Table of Contents 5.6 Glass Transitions of Copolymers 45 y 5.7 Dependence -
![Arxiv:1703.10946V2 [Physics.Comp-Ph] 20 Aug 2018](https://docslib.b-cdn.net/cover/4128/arxiv-1703-10946v2-physics-comp-ph-20-aug-2018-1904128.webp)
Arxiv:1703.10946V2 [Physics.Comp-Ph] 20 Aug 2018
A18.04.0117 Dynamical structure of entangled polymers simulated under shear flow Airidas Korolkovas,1, 2 Philipp Gutfreund,1 and Max Wolff2 1)Institut Laue-Langevin, 71 rue des Martyrs, 38000 Grenoble, France 2)Division for Material Physics, Department for Physics and Astronomy, Lägerhyddsvägen 1, 752 37 Uppsala, Swedena) (Dated: 21 August 2018) The non-linear response of entangled polymers to shear flow is complicated. Its current understanding is framed mainly as a rheological description in terms of the complex viscosity. However, the full picture requires an assessment of the dynamical structure of individual polymer chains which give rise to the macroscopic observables. Here we shed new light on this problem, using a computer simulation based on a blob model, extended to describe shear flow in polymer melts and semi-dilute solutions. We examine the diffusion and the intermediate scattering spectra during a steady shear flow. The relaxation dynamics are found to speed up along the flow direction, but slow down along the shear gradient direction. The third axis, vorticity, shows a slowdown at the short scale of a tube, but reaches a net speedup at the large scale of the chain radius of gyration. arXiv:1703.10946v2 [physics.comp-ph] 20 Aug 2018 a)Electronic mail: [email protected] 1 I. INTRODUCTION FIG. 1: A simulation box with C = 64 chains under shear rate Wi = 32. Every chain has N = 512 blobs, or degrees of freedom. The radius of the blob defines the length scale λ. For visual clarity, the diameter of the plotted tubes is set to λ as well. -
Introduction to Polymer Physics Lecture 5: Biopolymers Boulder Summer School July 9 – August 3, 2012
Introduction to polymer physics Lecture 5: Biopolymers Boulder Summer School July 9 – August 3, 2012 A.Grosberg New York University Colorado - paradise for scientists: If you need a theory… If your experiment does not work, and your data is so-so… • Theory Return & Exchange Policies: We will happily accept your return or exchange of … when accompanied by a receipt within 14 days … if it does not fit Polymers in living nature DNA RNA Proteins Lipids Polysaccha rides N Up to 1010 10 to 1000 20 to 1000 5 to 100 gigantic Nice Bioinformatics, Secondary Proteomics, Bilayers, ??? Someone physics elastic rod, structure, random/designed liposomes, has to start models ribbon, annealed heteropolymer,HP, membranes charged rod, branched, funnels, ratchets, helix-coil folding active brushes Uses Molecule Polysaccharides Lipids • See lectures by Sam Safran Proteins Ramachandran map Rotational isomer (not worm-like) flexibility Secondary structures: α While main chain is of helical shape, the side groups of aminoacid residues extend outward from the helix, which is why the geometry of α-helix is relatively universal, it is only weakly dependent on the sequence. In this illustration, for simplicity, only the least bulky side groups (glycine, side group H, and alanine, side group CH3) are used. The geometry of α-helix is such that the advance per one amino-acid residue along the helix axes is 0.15 nm, while the pitch (or advance along the axes per one full turn of the helix) is 0.54 nm. That means, the turn around the axes per one monomer equals 3600 * 0.15/0.54 = 1000; in other words, there are 3600/1000 =3.6 monomers per one helical turn. -

Introduction to Polymer Physics. 1 the References I Have Consulted Are the 2012 Lectures of Polymer Physics Pankaj Mehta from the 2012 Boulder Summer School
1 Introduction to Polymer Physics. 1 The references I have consulted are the 2012 lectures of Polymer physics Pankaj Mehta from the 2012 Boulder Summer School. Notes and videos available here https: March 8, 2021 //boulderschool.yale.edu/2012/ boulder-school-2012-lecture-notes. We have also used Chapter 1 of De In these notes, we will introduce the basic ideas of polymer physics – Gennes book, Scaling concepts in Poylmer with an emphasis on scaling theories and perhaps some hints at RG. Physics as well as Chapter 1 of M. Doi Introduction to Polymer Physics, this nice review on Flory theory https: //arxiv.org/abs/1308.2414, as well Introduction these notes from Levitov available at http://www.mit.edu/~levitov/8.334/ Polymers are just long floppy organic molecules. They are the basic notes/polymers_notes.pdf. building block of biological organisms and also have important in- dustrial applications. They occur in many forms and are an intense field of study, not only in physics but also in chemistry and chemical lectures. In these lectures, we will just touch on these ideas with an aim of understanding the basics of protein folding. A distinguishing feature of polymers is that because they are long and floppy, that entropic effects play a central role in the physics of polymers. A polymer molecule is a chain consisting of many elementary units called monomers. These monomers are attached to each other by covalent bonds. Generally, there are N monomers in a polymer, with N 1. This means that polymers behave like thermodynamic objects (see Figure 1). -

1 Biopolymers
“Lectures˙05˙and˙06˙and˙07” — 2007/11/10 — 12:34 — page 1 — #1 1 Biopolymers 1.1 Introduction to statistical mechanics 1.1.1 Free energy revisited Previously, we briefly introduced the concepts of free energy and entropy. Here, we will examine these concepts further and how they apply to biopolymers. To begin, we first need to introduce the idea of thermal fluctuations. Imagine a small particle floating in fluid. The particle will undergo Brownian motion, or random movements as it is randomly pushed around by the molecules around it. The mo- tion of the particle depends on the temperature: if the temperature is increased, the motion of the particle will also be increased. Like Brownian motion, polymers are subject to random molecular forces that cause them to ”wiggle”. These wig- gles are called thermal fluctuations. As temperature is increased, the polymers wiggle more. Why is this? Particle: Brownian motion Polymer: Thermal fluctuations Figure 1.1: Schematic depicting Brownian motion of a particle in fluid and thermal fluctuations of a polymer. Both are induced by random forces induced by the surrounding molecules. The conformation of a polymer is determined by its free energy. Specifically, poly- mers want to minimize their free energy. As we have seen already, the free energy is defined as ª = W ¡ TS. (1.1.1) 1 “Lectures˙05˙and˙06˙and˙07” — 2007/11/10 — 12:34 — page 2 — #2 1 Biopolymers W is referred to as the strain energy, or simply as the energy. T is temperature, and S is the entropy. We can see from 1.1.1 that a polymer can lower its free energy by lowering its energy W, or increasing its entropy S. -

Introduction to Polymer Physics Lecture 1 Boulder Summer School July – August 3, 2012
Introduction to polymer physics Lecture 1 Boulder Summer School July – August 3, 2012 A.Grosberg New York University Lecture 1: Ideal chains • Course outline: • This lecture outline: •Ideal chains (Grosberg) • Polymers and their •Real chains (Rubinstein) uses • Solutions (Rubinstein) •Scales •Methods (Grosberg) • Architecture • Closely connected: •Polymer size and interactions (Pincus), polyelectrolytes fractality (Rubinstein) , networks • Entropic elasticity (Rabin) , biopolymers •Elasticity at high (Grosberg), semiflexible forces polymers (MacKintosh) • Limits of ideal chain Polymer molecule is a chain: Examples: polyethylene (a), polysterene •Polymericfrom Greek poly- (b), polyvinyl chloride (c)… merēs having many parts; First Known Use: 1866 (Merriam-Webster); • Polymer molecule consists of many elementary units, called monomers; • Monomers – structural units connected by covalent bonds to form polymer; • N number of monomers in a …and DNA polymer, degree of polymerization; •M=N*mmonomer molecular mass. Another view: Scales: •kBT=4.1 pN*nm at • Monomer size b~Å; room temperature • Monomer mass m – (240C) from 14 to ca 1000; • Breaking covalent • Polymerization bond: ~10000 K; degree N~10 to 109; bondsbonds areare NOTNOT inin • Contour length equilibrium.equilibrium. L~10 nm to 1 m. • “Bending” and non- covalent bonds compete with kBT Polymers in materials science (e.g., alkane hydrocarbons –(CH2)-) # C 1-5 6-15 16-25 20-50 1000 or atoms more @ 25oC Gas Low Very Soft solid Tough and 1 viscosity viscous solid atm liquid liquid Uses Gaseous -

Macro Group Uk Polymer Physics Group Bulletin
Macro Group UK & Polymer Physics Group Bulletin No 83 January 2015 Number Page 83 1 January 2015 MACRO GROUP UK POLYMER PHYSICS GROUP BULLETIN INSIDE THIS ISSUE: Editorial Happy New Year and welcome to the January 2015 edition of Views from the Top 2 the Macro Group and PPG bulletin. Firstly we congratulate our distinguished award winners. Professor Richard Jones (University of Sheffield) is the recipient Committee Members 3 of the 2015 PPG Founders’ Prize. He will be presented with the award and give the Founders’ lecture at the PPG biennial in Manchester in September of this year. Dr Paola Carbone (University Awards 4-9 of Manchester) has been selected as the DPOLY Exchange Lecturer. She will present her lecture at the March 2015 meeting of the News 10 American Physical Society in San Antonio, Texas. Further details regarding both awards and the meeting in Manchester are given inside this issue of the bulletin. We also congratulate Professor Competitions Announcements 11-12 Cameron Alexander (The University of Nottingham) and Dr Paul D. Topham (Aston University) winners of the 2014 Macro Group Bursaries & Meeting Reports 12-19 UK Medal and Macro Group UK Young Researchers Medal, respectively. We would like to remind PhD students and postdoctoral Forthcoming Meetings 20-29 researchers who are members of the Macro Group that D. H. Richards bursaries are available to help fund conference expenses. We would like to encourage current polymer physics PhD students, and also those who have recently completed their studies, to apply for the Ian Macmillan Ward Prize. Contributions for inclusion in the BUL- As well as the prize announcement, this issue includes an LETIN should be emailed (preferably) article describing Professor Ward’s contributions to polymer physics or sent to either: and the decision by the PPG committee to name the PhD student prize in his honour. -

Rheo-Physical and Imaging Techniques - Peter Van Puyvelde, Christian Clasen, Paula Moldenaers and Jan Vermant
RHEOLOGY - Vol. I - Rheo-Physical and Imaging Techniques - Peter Van Puyvelde, Christian Clasen, Paula Moldenaers and Jan Vermant RHEO-PHYSICAL AND IMAGING TECHNIQUES Peter Van Puyvelde, Christian Clasen, Paula Moldenaers, and Jan Vermant K.U. Leuven, Department of Chemical Engineering, W. de Croylaan 46, B-3001 Leuven, Belgium Keywords: linear dichroism, flow-birefringence, rheo-scattering methods, flow-induced structures, in-situ measurements, direct imaging Contents 1. Introduction 2. Polarimetry 2.1. Definitions 2.2. Experimental Techniques 2.3. Linear Birefringence Measurements: Case-Studies 2.3.1. The Stress-Optical Relation in Polymers 2.3.2. Separation of the Intrinsic and Form Birefringence 2.4. Linear Conservative Dichroism: Case-studies 2.4.1. Immiscible Polymer Blends 2.4.2. Filled Polymeric Systems 2.5. Conclusion 3. Light scattering 3.1. Theoretical Background 3.2. Experimental Set-ups 3.3. Small Angle Light Scattering: Case-studies 3.3.1. Immiscible Polymer Blends 3.3.2. Filled Polymeric Systems 3.3.3. Flow-induced Crystallization of Polymers 3.4. Conclusion 4. Direct imaging methods 4.1. Optical Microscopy 4.2. Conclusion 5. General conclusion AcknowledgementsUNESCO – EOLSS Glossary Bibliography Biographical Sketches SAMPLE CHAPTERS Summary Rheo-optical methods have become an established technique in the study of structured fluids. More than rheology, the techniques provide in-situ information of morphological changes during flow. In this chapter, the emphasis is on indirect optical techniques such as polarimetry and light scattering. The fundamentals of dichroism, birefringence and scattering are briefly reviewed. In order to demonstrate the power of the techniques, several case-studies are provided. They encompass many material classes, ranging from emulsions, suspensions and crystallizing polymeric systems. -

Path Integrals with Μ1(X) and Μ2(X) the first and Second Moments of the Transition Probabilities
1 Introduction to path integrals with ¹1(x) and ¹2(x) the ¯rst and second moments of the transition probabilities. v. January 22, 2006 Another approach is to use path integrals. We will use Phys 719 - M. Hilke the example of a simple brownian motion (the random walk) to illustrate the concept of the path integral (or Wiener integral) in this context. CONTENT ² Classical stochastic dynamics DISCRETE RANDOM WALK ² Brownian motion (random walk) ² Quantum dynamics The discrete random walk describes a particle (or per- son) moving along ¯xed segments for ¯xed time intervals ² Free particle (of unit 1). The choice of direction for each new segment ² Particle in a potential is random. We will assume that only perpendicular di- rection are possible (4 possibilities in 2D and 6 in 3D). ² Driven harmonic oscillator The important quantity is the probability to reach x at 0 0 ² Semiclassical approximation time t, when the random walker started at x at time t : ² Statistical description (imaginary time) P (x; t; x0; t0): (3) ² Quantum dissipative systems For this probability the following normalization condi- tions apply: INTRODUCTION X 0 0 0 0 P (x; t; x ; t) = ±x;x0 and for (t > t ) P (x; t; x ; t ) = 1: Path integrals are used in a variety of ¯elds, including x stochastic dynamics, polymer physics, protein folding, (4) ¯eld theories, quantum mechanics, quantum ¯eld theo- This leads to ries, quantum gravity and string theory. The basic idea 1 X is to sum up all contributing paths. Here we will overview P (x; t + 1; x0; t0) = P (»; t; x0; t0); (5) the technique be starting on classical dynamics, in par- 2D h»i ticular, the random walk problem before we discuss the quantum case by looking at a particle in a potential, and where h»i represent the nearest neighbors of x. -

An Introduction to Polymer Physics David I
Cambridge University Press 0521631378 - An Introduction to Polymer Physics David I. Bower Frontmatter More information An Introduction to Polymer Physics No previous knowledge of polymers is assumed in this book which provides a general introduction to the physics of solid polymers. The book covers a wide range of topics within the field of polymer physics, beginning with a brief history of the development of synthetic polymers and an overview of the methods of polymerisation and processing. In the following chapter, David Bower describes important experimental techniques used in the study of polymers. The main part of the book, however, is devoted to the structure and properties of solid polymers, including blends, copolymers and liquid-crystal polymers. With an approach appropriate for advanced undergraduate and graduate students of physics, materials science and chemistry, the book includes many worked examples and problems with solutions. It will provide a firm foundation for the study of the physics of solid polymers. DAVID BOWER received his D.Phil. from the University of Oxford in 1964. In 1990 he became a reader in the Department of Physics at the University of Leeds, retiring from this position in 1995. He was a founder member of the management committee of the IRC in Polymer Science and Technology (Universities of Leeds, Durham and Bradford), and co-authored The Vibrational Spectroscopy of Polymers with W. F. Maddams (CUP, 1989). His contribution to the primary literature has included work on polymers, solid-state physics and magnetism. © Cambridge University Press www.cambridge.org Cambridge University Press 0521631378 - An Introduction to Polymer Physics David I.