Area-based Automatic Image Registration Techniques and Quality Assessment Criteria
SAQIB YOUSAF, WILL HOSSACK Institute of Meteorology, University of Edinburgh, UK
Abstract: - Automatic image registration has become an important issue in many different types of applications and data. In this paper, we present a quantitative evaluation for various area-based registration techniques. To benchmark the accuracy of final registration parameters, a new quality measure is proposed, which is also tested successfully as a similarity measure for wavelet-based image registration using the LL subband. Also dependence of registration accuracy on detail and contrast in images is analyzed. To get more reliable registration parameters, smoothing found to be helpful in suppressing noise and very high frequency components. Energy of Canny edged image can be used in estimating the required degree of smoothness. Smoothing must be achieved with minimum effect on important significant features and edges. The algorithms have been tested for Landsat Thematic Mapper (TM), aerial and medical (CT) images.
Key-Words: - Image registration, wavelet decomposition, multiresolution analysis, similarity measures, TM images, remote sensing.
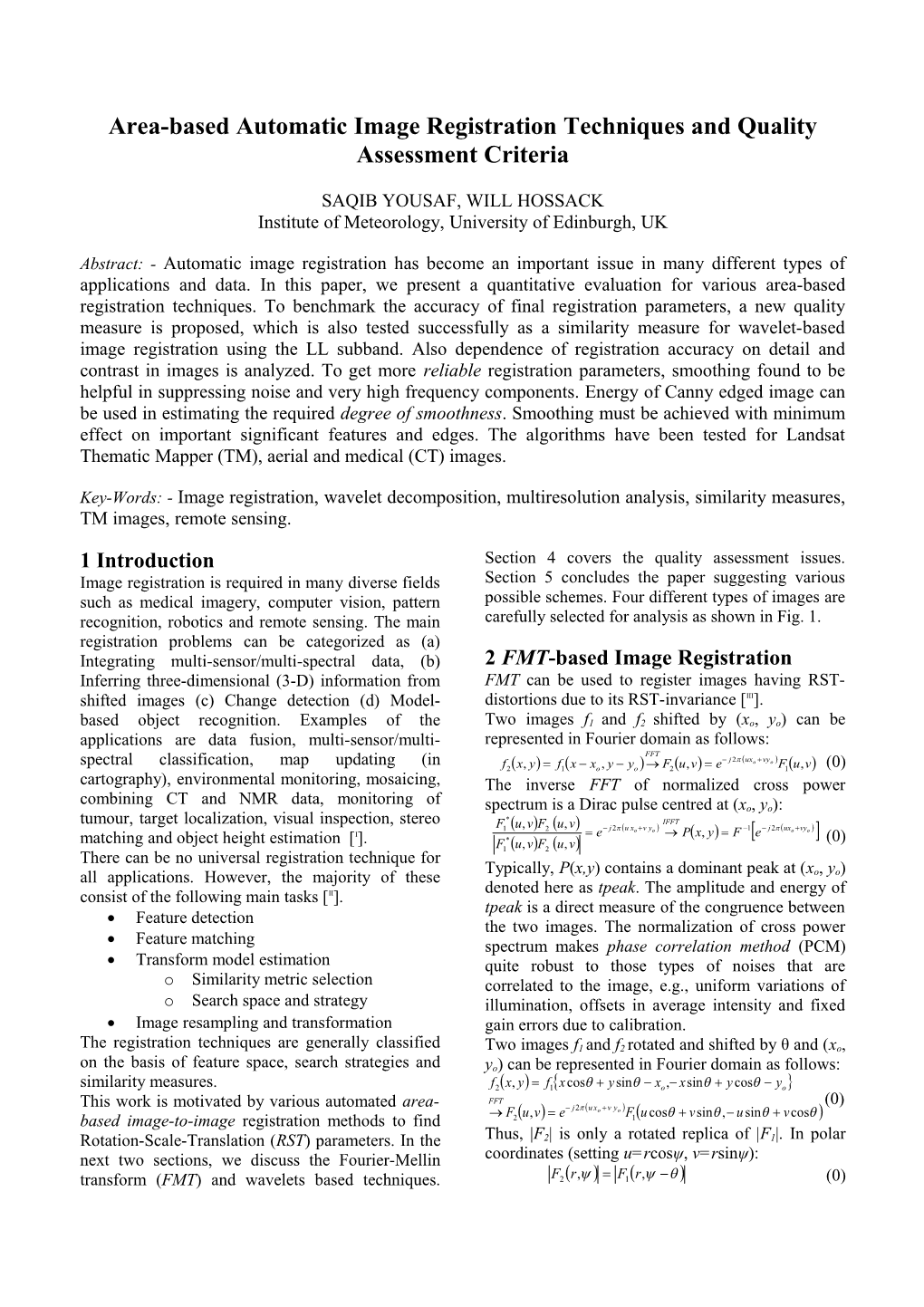
1 Introduction Section 4 covers the quality assessment issues. Image registration is required in many diverse fields Section 5 concludes the paper suggesting various such as medical imagery, computer vision, pattern possible schemes. Four different types of images are recognition, robotics and remote sensing. The main carefully selected for analysis as shown in Fig. 1. registration problems can be categorized as (a) Integrating multi-sensor/multi-spectral data, (b) 2 FMT-based Image Registration Inferring three-dimensional (3-D) information from FMT can be used to register images having RST- shifted images (c) Change detection (d) Model- distortions due to its RST-invariance [III]. based object recognition. Examples of the Two images f1 and f2 shifted by (xo, yo) can be applications are data fusion, multi-sensor/multi- represented in Fourier domain as follows: FFT spectral classification, map updating (in j2 uxo vyo f2 x, y f1x xo , y yo F2 u,v e F1u,v (0) cartography), environmental monitoring, mosaicing, The inverse FFT of normalized cross power combining CT and NMR data, monitoring of spectrum is a Dirac pulse centred at (xo, yo): tumour, target localization, visual inspection, stereo F * u,v F u,v IFFT 1 2 j 2 u xo v yo 1 j 2 uxo vyo I e Px, y F e matching and object height estimation [ ]. * (0) F1 u,vF2 u,v There can be no universal registration technique for Typically, P(x,y) contains a dominant peak at (x , y ) all applications. However, the majority of these o o denoted here as tpeak. The amplitude and energy of consist of the following main tasks [II]. tpeak is a direct measure of the congruence between Feature detection the two images. The normalization of cross power Feature matching spectrum makes phase correlation method (PCM) Transform model estimation quite robust to those types of noises that are o Similarity metric selection correlated to the image, e.g., uniform variations of o Search space and strategy illumination, offsets in average intensity and fixed Image resampling and transformation gain errors due to calibration.
The registration techniques are generally classified Two images f1 and f2 rotated and shifted by θ and (xo, on the basis of feature space, search strategies and yo) can be represented in Fourier domain as follows: similarity measures. f2 x, y f1xcos ysin xo , xsin y cos yo FFT (0) This work is motivated by various automated area- j2 u x v y F u,v e o o F u cos vsin, u sin vcos based image-to-image registration methods to find 2 1 Rotation-Scale-Translation (RST) parameters. In the Thus, |F2| is only a rotated replica of |F1|. In polar next two sections, we discuss the Fourier-Mellin coordinates (setting u=rcosψ, v=rsinψ): F r, F r, transform (FMT) and wavelets based techniques. 2 1 (0) Thus, rotation appears as vertical shift along ψ-axis, Due to noise and ‘’ shaped artifacts in Fourier so PCM can be applied to the pair of polar Fourier space, tpeak is much less then 1 even if the image is images to recover θ. corrected by true RS-parameters [V]. These arise due If image f2 is a (1/a, 1/b) scaled replica of f1: to sharp boundaries when rotation and scale are FFT 1 u v rectified before finding translation parameters (due f 2 x, y f1 ax,by F2 u, v F1 , (0) ab a b to finite nature of images). These artifacts can only Thus, magnitude of F2 scaled down. be avoided for rotations that are integer multiples of o If input image f2 is a 1/s scaled, θ- rotated and (xo, 90 (see Fig. 1). Image can be multiplied by a yo) shifted replica of reference image f1: circularly symmetric or blurred-border window to f x, y f sx cos y sin x , s x sin y cos y VI 2 1 o o reduce this effect [ ]. These errors are less FFT 1 u cos v sin u sin v cos j2 uxo vyo / s (0) F2u, v e F1 , significant for images having uniform background, s2 s s FMT is obtained on using log-polar coordinates: which can be the case for some medical images. 1 Thus tpeak is computed after RS-correction and F2 log r, F1log r log s, (0) s2 only the rspeak giving tpeak above a suitable value considered reliable (see Fig. 6). Here we are not ( a ) ( b ) C a s e - I : L o t o f d e t a i l s C a s e - I I : L e s s e r d e t a i l s concerned with this suitable value of tpeak due to its lack of generality for all types of images; rather we will discuss the issues, which can improve tpeak. ( c ) ( d ) Images must be of the same size especially for Logpolar conversion square images are required.
C a s e - I I I : L a n d s a t i m a g e s C a s e I V : C T i m a g e o f h u m a n b r a i n Let (Xs, Ys) be the position of rspeak or tspeak, then
( e ) ( f ) Xs must be replaced with Nc-Xs when Xs> Nc/2. Similarly, Ys must be replaced with Nr-Ys when Ys> Nr/2. Here Nr and Nc represent number of rows and columns of images. Such peaks correspond to negative shifts and rotations or scale less than 1 [VII]. Fig. 1. Left: Test images, Right: ‘+’ Artifacts (a) FFT of case-I image, (b) FFT of case-I image rotated by 45o. (c) FFT of case-I image with Following high-pass filter is used on logpolar image VIII RST= [45, 1.25, (50 50)], (d) FFT of case-I image rotated by 90o (e) due to its numerical instability near the origin [ ]. FFT of case-IV image. (f) FFT of case-IV image rotated by 45o H u,v 1 cosucos v2 cosucos v,where 0.5 u,v 0.5 (0) Using the Fourier power spectrum of these A window-function must be applied to the images functions, the shift (logs,θ) can be determined by before calculating FFT to reduce boundary PCM from the position of the peak denoted here as discontinuity effects and suppress spurious peaks. rspeak. The exact location of both rspeak and tpeak We tested hamming, hann, Gaussian, Kaiser and can be determined by interpolation or from centre of Tukey (cosine-tapered) filters [IX]. Hamming mass of the peak [IV]. Fig. 2 shows rspeak and tpeak windows has shown better results for our cases. versus individual RST-distortions and hence the The analysis based on mean and variance of P(x,y) overlap. The effect of ‘+’ artifacts is obvious in and value of tpeak gives an idea of registration o rotation-curve. At 90 validity [X]. S c a l e 0 . 5 1 1 . 5 tpeak increases sharply 1 0 0 1 0 0 T r a n s l a t i o n R o t a t i o n
" S c a l e k 8 0 8 0 S c a l e a e p
t 2.2 Decoupling Scale and Rotation
0 . 5 1 1 . 5 "
1 0 0 1 0 0 f o T r a n s l a t i o n y 6 0 6 0 g
R o t a t i o n r
e " Integrating FMT along the -axis produces an RT- n k S c a l e
e a
8 0 8 0 f e o p s
e 4 0 4 0 r " g f a
t invariant function S(logr) called the scale signature. o
n y
6 0 6 0 e g c r r e e 2 0 2 0 n P e
f Similarly, integrating FMT along the logr-axis o 4 0 4 0 e g a t 0 0 n 0 2 0 4 0 6 0 8 0 1 0 0 e
c produces an ST-invariant function R() called r T r a n s l a t i o n a l s h i f t ( p i x e l s ) & R o t a t i o n a n g l e ( d e g ) e 2 0 2 0 P rotation signature. The scale can be found by 1-D 0 0 0 2 0 4 0 6 0 8 0 1 0 0 due to the absence of T r a n s l a t i o n a l s h i f t ( p i x e l s ) & R o t a t i o n a n g l e ( d e g ) these artifacts. normalized cross correlation of the two scale Fig. 2. Effect of individual RST-distortions signatures S1 & S2 of two images. According to M. XI 2.1 Implementation issues McGuire [ ] a suitable filter must be applied on Eq.1-7 consider images as continuous & infinite. FMT before integration to remove the artifacts. A Discreteness of images introduces sampling errors. Tukey filter with parameter 0.3 (which corresponds Also, Logpolar images naturally have poor to a blurred-border window) has shown excellent resolution for pixels away from the centre. These results. Also, a moving average subtraction is errors may be reduced by using high-resolution performed on S1 & S2 to improve signal-to-noise logpolar images or better interpolation methods. ratio. Then using the same FMT, rotation can be obtained by 1-D normalized cross correlation of two registration validity. rotation signatures R1 & R2. It can be useful to rectify the scale error before calculating rotation. 3 Wavelets-based Image Registration Fig. 3 shows that about three more peaks are Wavelets are quickly decaying oscillatory waves. comparable to the peak corresponding to actual They are preferred choice over Fourier transform value. Thus, it is better to test a list of scale mainly due to time localization and multiresolution. parameters obtained from top few peaks. The scale They can isolate singularities and irregular parameter giving best tpeak should be selected. structures in signals due to its mother wavelet, Also, CT image has fewer artifacts because of which can be scaled and translated. A tree structured uniform background, which result in larger peak and Fast discrete wavelet transform (DWT) algorithm less contribution from the false peaks. developed by Mallat [XII] can calculate lower
1 resolution coefficients from the higher resolution 0 . 8 coefficients by successive lowpass and highpass 0 . 6 filtering using two-channel Quadrature-Mirror
e 0 . 4 XIII u l
a Filter (QMF) Bank [ ] (see Fig. 5). v 0 . 2 n o i
t Rows Columns a l Decimate e 0 r r
o L rows by 2 LL c k+1 - 0 . 2 s s
o Decimate r
C - 0 . 4 L columns Lk+1 by 2 - 0 . 6 Decimate
H rows by 2 LHk+1 - 0 . 8 ( C a s e - I i m a g e ) t u k e y : 0 . 3 Original ( B r a i n i m a g e ) t u k e y : 0 . 3 image or Vertical - 1 edges - 2 0 0 - 1 0 0 0 1 0 0 2 0 0 LLk L a g Decimate L rows by 2 HL Fig. 3. Cross correlation peak to find scale parameter separately k+1 Decimate Horizontal 1 H columns Hk+1 edges by 2 0 . 8 Decimate H rows by 2 HHk+1 0 . 6 F represents the convolution of the input image by filter F. Diagonal edges e 0 . 4
u Here L stands for low-pass filter and H stands for high-pass filter. l a v
n 0 . 2 o
i Fig. 5. Wavelet decomposition of an image t a l
e 0 r
r Four subband images can be obtained from the o c - 0 . 2 s
s original image or previous LL image. The LH and o r
C - 0 . 4 N o f i l t e r HL images contain horizontal and vertical edge - 0 . 6 k a i s e r : 3 0 k a i s e r : 8 0 features respectively, while the HH contains mostly - 0 . 8 h a m m i n g N o f i l t e r : B r a i n i m a g e high frequency noise. The main steps in wavelets- - 1 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 A n g l e ( d e g ) c o r r e s p o n d i n g t o L a g based registration are shown in Fig. 6. Fig. 4. Effect of various filters on cross correlation peak in finding Reference image Input image Reference Input f (x,y) f (x,y) rotation separately 1 2 Image Image Fig. 4 shows false peaks at about 90o interval due to 2D Windows Filter Wavelet decomposition boundary discontinuity effect. Hence, brain image Hann, gaussian, Hamming, Kaiser etc (Haar, Daubechies, Biorthogonal etc.) has no false peaks even if there is no filter applied. FFT Kaiser window applied on images before calculating Feature extraction FFT removes these artifacts very nicely when its High Pass Filter (LL, HL, LH ,MOD, PC, HT, MT) Log-polar parameter is increased. An Edge-enhancer filter on Transformation model estimation by feature matching using e e
FMT can make this peak sharper. l l g Phase Correlation a similarity measure n y c S g A e
Iterative improvement of rotation/scale parameters t a r t s
Optimal angle Optimal
is observed by increasing resolution along the h c
r from each Translation from n a o i e rotation/scale axis in logpolar image. The 1-D cross- t subband each subband a S
Transformation l s n a correlation is performed each time using maximum r T lag corresponding to twice the previous estimate of Translation Module Required RS-parameters rotation parameter, which not only helps to avoid Fig. 6. Left: Steps in FMT–based image registration, Right: Steps in searching for irrelevant estimate but also reduce Wavelets-based image registration computational time. The iteration can be stopped when there is no significant change in the estimate. 3.1 Feature space j j The images having smaller rspeak do not show such Let fLH(2 ,x,y) and fHL(2 ,x,y) are the LH and HL j iterative improvement, so it can be used for images at scale 2 , then we can define an image fMOD containing both horizontal and vertical edges as smaller search steps at the first step to avoid follows [XIV]: pursuing a false path.
j j 2 j 2 TABLE 1: SEARCH STRATEGY fMOD 2 , x, y fHL 2 , x, y fLH 2 , x, y (0) L Rotation e
v Image Translation x,
Another tested feature is the histogram-thresholded e search Results size search space y (HT) image of this MOD image containing top n% space intensities of the histogram [XV]. The mean and 4 3232 0 8 Txo 16, Tyo 16 4 8 3,Tx3, Ty3 j 3 2 4 ,T , T j 6464 3 4 Tx3 8, Ty3 8 2 x2 y2 standard deviation j at level 2 can also be used to 2 128128 2 2 Tx2 2, Ty2 2 1 2 1,Tx1, Ty1 XVI threshold MOD as follows [ ]: 1 256256 1 1 Tx1 1, Ty1 1 1 1 ,Tx, Ty j MTf MOD 2 , x, y j , where j j j (0) The parameters and n can be used to control the 3.3 Wavelet filters number of feature points. The choice of filter bank in image registration is an important issue [XVII], [XVIII]. A higher order filter can 1 1 have good frequency localization, which in turn 0 . 8 0 . 8 e e u u l l increases the energy compaction whereas a lower a a
v 0 . 6 v 0 . 6
n n o o i i t t order filter is expected to have a better time a a l l
e 0 . 4 e 0 . 4 r r r r o o
C C localization and therefore preserve the edges. It is 0 . 2 0 . 2 observed that spline biorthogonal (bior) wavelets 0 0 0 1 2 3 4 0 1 2 3 4 ( a ) ( b ) are the best choice. Daubechies (Db) can be
1 1 inconsistent except Haar filter. The reason for this H L L H may be the limited discontinuity of its scaling 0 . 8 0 . 8 M O D
e e P C u u l l
a a H T v 0 . 6 v 0 . 6 function at only two points. Fig. 8 shows the
n n M T o o i i t t a a l l performances of few filters with different orders for
e 0 . 4 e 0 . 4 r r r r o o C C 0 . 2 0 . 2 MOD subband. The filters Haar, Bior1.3 and
0 0 Bior2.2 show good results but Db2 and Db3 show 0 1 2 3 4 0 1 2 3 4 ( c ) ( d ) poor and inconsistent results.
Fig. 7. NCC values for each level. Level 0 corresponds to correlation 1 1 for rectified images. (a) For case-I image (b) for smoothed case-II 0 . 8 0 . 8 e e
image (c) for noisy case-I image (SNR=5) (d) for case-II image u u l l a a v v 0 . 6 0 . 6
j n n o o i i
Also the first principal component image fPC(2 ,x,y) t t a a l l e e 0 . 4 0 . 4 r r r j r o o
of HL and LH images at scale 2 can be used. C C Fig. 7 shows that registration using MOD, HT and 0 . 2 0 . 2 0 0 0 1 2 3 4 0 1 2 3 4 MT gives nice results but PC is inconsistent. ( a ) ( b )
Smoothing results in better performance while noise 1 1 H a a r D b 2 decreases the correlation value of level 1 and 2. 0 . 8 0 . 8 D b 3
e e B i o r 1 . 3 u u l l a a B i o r 2 . 2 v v
0 . 6 0 . 6 Case-II images give high correlation values for all n n o o i i t t a a l l e e 0 . 4 0 . 4 r subbands due to its lesser details. r r r o o C C 0 . 2 0 . 2
0 0 3.2 Search space and search strategy 0 1 2 3 4 0 2 4 Wavelet’s multiresolution search strategies are fast ( c ) ( d ) and efficient for search space composed of 2-D Fig. 8. NCC values for each level. Level 0 corresponds to correlation rotations and translations. Estimated RT-parameters for rectified images. (a) For case-I image (b) for smoothed case-I image (c) for noisy case-I image (SNR=2.5) (d) for case-II image from the lowest resolution are used as an input to the higher resolution image giving a refined search 3.4 Implementation Issues space (see Table I). The initial estimate for rotation The noise has more effect on higher resolution θo is determined by searching best angle in the subbands and decreases their normalized correlation interval [-90, 90]. The accuracy of parameters coefficient (NCC) (see Fig. 7). doubles with each next level when going from low The gradual improvement of NCC with the decrease resolution to high resolution. The computation can in level shows Registration validity. be reduced by searching for one parameter at a time Wavelet coefficients (especially with high assuming the other’s last estimate to be known frequency) are not translation invariant due to the [Error: Reference source not found]. XIX use of convolution and subsampling [ ]. We suggest another possibility in search strategy of rectifying images by using estimated RT-parameters 3.5 Similarity measure after the first step. For such a strategy, one needs a The NCC is a widely used similarity measure, but it 4 Quality assessment criteria has few limitations e.g., computationally expensive, As no registration algorithm can be perfect so undesirable behaviour for images containing too scatter plots and difference images are used to see much/ little fine structure and high sensitivity to the the performance. But we are interested in a image skewing, vignetting etc. It can be undefined quantitative measurement for the accuracy of final (due to division by 0), if any image has uniform registration parameters in terms of a single number intensity. Also NCC can be same as long as the local named as Quality measure. mean and/or histogram of pixel intensities are relatively unchanged [XX]. The minimum acceptable 4.1 Edge width in difference image (EWDI) value of NCC is another issue. To deal with the The difference image Id of rectified input image and limitations of NCC to some extent, a modified NCC reference image contains mostly zeros except near is used, which is calculated by taking an average of the edges of the objects (see Fig. 10). With more NCC from four equal parts of the image. accurate RST-estimates, the lines in Id become sharper and thinner. We binarized Id by applying a 3.6 Wavelet-based Denoising threshold and calculated the energy Ed. Fig. 7-9 shows that sensible smoothing improves the 1 E I i, j 2 registration performance. The energy of canny edge Here, d d (0) N i j (ECE) is found useful in quantifying the roughness. An exponential decrease in Ed is observed with the The ECE value for images of case I-IV was found increase in this threshold value (see Fig. 10). Also, a 0.0665, 0.0486, 0.169, and 0.0559 respectively. bad RST-estimate shows slower decrease of E – Also, their standard deviation is 53.94, 48.02, 52.79 d curve. These curves can be modelled as et to and 78.46 respectively. Thus for Landsat image quantify the rate of decrease by . The parameter ECE is large but standard deviation is low (i.e., low can be found now by simply least square estimate of contrast and lot of details). Smoothing is found to be slope of straight line curve of log(E ). We will call effective for such images. For aerial images, ECE is d as EWDI (Edge width in difference image). less and high standard deviation. When uniform ( a ) ( b ) noise is added, both ECE and standard deviation 0 . 7 0 , 0 - 3 , - 3 should increase. 0 . 6 - 6 , - 6 - 9 , - 9 0 . 5 3 , 3 Smoothing can be achieved by applying Gaussian 6 , 6 9 , 9 0 . 4
lowpass filter but wavelet-based denoising methods ( c ) ( d ) d E are better as they are more flexible and can retain 0 . 3 the edges. Donoho’s and Johnstone’s waveshrink 0 . 2 0 . 1 XXI [ ] is most widely used method for denoising or 0 0 5 1 0 1 5 2 0 2 5 3 0 3 5 smoothing images, which is based on a soft T h r e s h o l d XXII Fig. 10. Registration results (a) Reference image (b) Input image (c) threshold [ ]. We applied this method to smooth Rectified input image (d) Difference image of (a) and (c), Right: Effect images and used ECE to find the required value of of threshold for dI on EdI . Each curve is plotted for a different shift soft threshold. Moreover, a soft threshold on high The effect of RST-distortions on various similarity frequency subbands of level 1 or 2 can solve the measures is checked e.g., Fig. 11 shows NCC and problem of decrease in correlation value for these EWDI versus RST-distortions. The curves for other levels with the increase in noise. similarity measures differ in terms of steepness, Fig. 9 shows results for Landsat images using Haar which shows their sensitivity with respect to filter with MOD subband. Denoisng using mean of distortion. Feature sizes, noise and image type also the image as a soft threshold seems useful. Also, to plays role in the shape of these curves. EWDI also register various Landsat bands, the use of subbands has a peak for RST-parameters, which can align two like MT or HT seems a better approach. images exactly. The value of this peak depends on
1 the noise, resampling method and type of images s a m e B a n d , s a m e t i m e S m o o t h e d b y w a v e l e t s 0 . 9 5 s a m e B a n d , 1 9 9 0 & 2 0 0 0 used. EWDI not only decrease quite rapidly and B 1 & B 2 , 1 9 9 0 & 2 0 0 0 B 1 & B 3 , 1 9 9 0 & 2 0 0 0 0 . 9 smoothly but also remains almost unchanged after e u l a v 0 . 8 5 the distortion exceeds beyond a significant amount. n o i t a l
e 0 . 8 r This property makes it useful for the final analysis r o C 0 . 7 5 of RST-parameters. To see the limitations of EWDI,
0 . 7 we used various types of images. It was observed
0 . 6 5 that for images with noise and very small features 0 0 . 5 1 1 . 5 2 2 . 5 3 3 . 5 4 EWDI still showed a peak for the correct RST-values Fig. 9. Correlation values for each level. Here B# stands for Landsat band followed by the year of acquisition but the value of the peak was reduced. Scale Scale 0 . 5 1 1 . 5 0 . 5 1 1 . 5 1 1 0 . 1 8 0 . 2 T r a n s l a t i o n T r a n s l a t i o n 0 . 9 R o t a t i o n 0 . 1 6 R o t a t i o n S c a l e 0 . 8 S c a l e 0 . 1 4 0 . 1 5 0 . 8 0 . 1 2
n 0 . 6 o
i 0 . 7 I t a D l e
W 0 . 1 0 . 1 r r E o
C 0 . 6 0 . 4 0 . 0 8 0 . 5 0 . 0 6 0 . 0 5 0 . 2 0 . 4 0 . 0 4
0 . 3 0 0 . 0 2 0 0 5 1 0 1 5 2 0 2 5 3 0 0 5 1 0 1 5 2 0 2 5 3 0 Translational shift (pixels) & Rotation angle (deg) Translational shift (pixels) & Rotation angle (deg)
Fig. 11. Effect of RST-distortions 4.2 EWDI based registration EWDI is also tested as a similarity measure in wavelet-based registration. EWDI can not be used in level 3 or 4 because of the non-availability of sharp
edges in Id. So for these levels we have to use NCC as a similarity measure. Moreover, only LL subband can be used for registration in this case.
5 Conclusions This study presented an analysis of various registration techniques and issues relating to the reliability of RST-estimates. EWDI can be used to assess the quality of RST-estimates while ECE can be used in wavelet denoising. In FMT-based registration various filters are suggested. The use of LL subband with EWDI as a similarity measure shows good result for images of same type. In wavelet-based techniques various filters/subbands are suggested. Finally various schemes are suggested to achieve desired level of accuracy and computational time (see Table II). References:
Techniques Pros Cons Comments FMT-based technique Robust with respect to noise, different image 1. ‘+’ artifacts Can select the size of only types and multispectral images 2. Computationally expensive logpolar images FMT-based technique 1. Benefits of FMT and multiresolution Accuracy decreases by half with every LL image of level 1 and 2 on wavelet subbands 2. Computational cost saving level gives nice results Decoupling scale and 1. 1D correlation is computationally quick. 1. Careful use of filters, edge enhancer, Translation determined by rotation using FMT 2. Same FMT can be used for both scale and moving average subtraction PCM after correcting scale rotation estimation and rotation errors Wavelet-based 1. Preservation of stronger features and Needs to consider: Don’t consider the non- technique reduced noise sensitivity at coarser levels 1. Type and order of wavelet filter overlapping areas (due to RS- 2. The accuracy of RT-parameter increase 2. Search strategy correction) in NCC/EWDI iteratively (from higher to lower levels) 3. Choice of subband (feature space) calculation. 3. Fast and suitable for parallel computers 4. Initial estimate (especially for scale) Wavelet-technique 1. Narrowing of search space 1. Extra computation for initial estimate FMT-based rough estimate with initial guess 2. Can avoid searching for unwanted values 2. depend on initial estimate accuracy from level 1 or 2 can be used Wavelet technique 1. Good for multispectral images Can be more sensitive to RST-errors MT seems better than HT using thresholding 2. Reduction in search data Wavelet technique LL subband is more translation invariant and EWDI is highly dependent on image Found useful with Haar filter using LL and EWDI less sensitive to noise intensity conservation assumption and images of the same type I[] L. Brown, A survey of image registration techniques, ACM Computing Surveys, Vol. 24 (4), 325-376, 1992. II[] J. Flusser, B. Zitova and T. Suk, Invariant-Based Registration of Rotated and Blurred images, Proc. IGARSS, Vol. 2, 1262-1264, 1999. III[] T. M. Lehmann et al., A Rotation-Extended Cepstrum Technique IVand its Application to Medical Images, Pattern Recognition and Image Analysis Vol. 6 (3), 592-604, 1996. [] J. L. Moigne et al., First Evaluation of Automatic Image Registation Methods, Proc. IGARSS, 315-317, 1998. TABLE II: VARIOUS IMAGE REGISTRATION SCHEMES
V
[] C.-Y. Lin et al., Rotation, scale, and translation resilient public watermarking for images, IEEE Trans. Image Processing, vol. 10, 767–782, 2001. VI[] H. S. Stone, B. Tao, and M. McGuire, Analysis of image registration noise due to rotationally dependent aliasing, J. Vis. Commun. Image, R. 14, 114-135, 2003. VII[] H. Xie et al., An IDL/ENVI implementation of the FFT-based algorithm for automatic image registration, Computers & Geosciences, Vol 29, 1045-1055, 2003. VIII[] B. S. Reddy, B. N. Chatterji, An FFT-based technique for translation, rotation and scale-invariant image registration, IEEE Trans. ImageProcessing, Vol. 5, 1266–1271, 1996. IX[] F. J. Harris, On the use of windows for harmonic analysis with the discrete Fourier transform, Proc. IEEE, Vol. 66 (1), 51–83, 1978. X[] D. Stricker, “Tracking with Reference Images: A Real-Time and Markerless Tracking Solution for Out-Door Augmented Reality Applications,” Virtual Reality, Archaeology, and Cultural Heritage International Symposium (VAST01), 2001. XI[] M. McGuire, An image registration technique for recovering rotation,scale and translation parameters, NEC Res. Inst. Tech. Rep., TR 98-018, 1998. XII[] S. G. Mallat. A theory for multiresolution signal decomposition: the wavelet representation, IEEE Transactions on Pattern Analysis and Machine Intelligence, 11:674–693, 1989. XIII[] G. Strang, T. Nguyen, Wavelets and Filter Banks, Wellesley-Cambridge Press, 1997 (Revised Edition). XIV[] Q. Guihong, Z. Dali, and Y. Pingfan, "Medical image fusion by wavelet transform modulus maxima," Opt. Express 9, 184-190, 2001. XV[] J. L. Moigne, W. J. Campbell, R. F. Cromp, An automated parallel image registration technique based on the correlation of wavelet features, IEEE Trans. Geosci Remote Sensing, Vol. 40 (8), 1849 -1864, 2002. XVI[] L. M. G. Fonseca, M. H. M.Costa, Automatic registration of satellite images, X Brazilian Symposium of Computer Graphic and Image Processing, 219-226, 1997. XVII[] A. Rekik, M. S. Bouhlel, Tracking of the breast cancer by Microcalcifications segmentation based on Wavelet transform, 3rd WSEAS ISPRA, 2004. XVIII[] R. Turcajova, J. Kautsky, A hierarchical multiresolution technique for image registration, Proc. SPIE - Wavelet Applications in Signal and Image Processing IV, Vol. 2825, 686-696, 1996. XIX[] H. S. Stone, J. Le Moigne, and M. McGuire, The translation sensitivity of wavelet-based registration, IEEE Trans. Pattern Anal. Machine Intell., Vol. 21, 1074–1081, 1999. XX[] E.K. Yen and R.G. Johnston, The Ineffectiveness of the Correlation Coefficient for Image Comparisons, Report LAUR-96-2474, Los Alamos National Laboratory, 1996. XXI[] D. L. Donoho, De-noising by soft-thresholding, IEEE Trans. Information Theory, vol. 41 (3) , 613 -627, 1995. XXII[] P. Bojarczak, S. Osowski, Denoising of Images – a Comparison of Different Filtering Approaches, WSEAS Trans. On Computers, Vol. 3(3), 738-744, 2004.