Deriving the Equations of Motion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Position, Displacement, Velocity Big Picture
Position, Displacement, Velocity Big Picture I Want to know how/why things move I Need a way to describe motion mathematically: \Kinematics" I Tools of kinematics: calculus (rates) and vectors (directions) I Chapters 2, 4 are all about kinematics I First 1D, then 2D/3D I Main ideas: position, velocity, acceleration Language is crucial Physics uses ordinary words but assigns specific technical meanings! WORD ORDINARY USE PHYSICS USE position where something is where something is velocity speed speed and direction speed speed magnitude of velocity vec- tor displacement being moved difference in position \as the crow flies” from one instant to another Language, continued WORD ORDINARY USE PHYSICS USE total distance displacement or path length traveled path length trav- eled average velocity | displacement divided by time interval average speed total distance di- total distance divided by vided by time inter- time interval val How about some examples? Finer points I \instantaneous" velocity v(t) changes from instant to instant I graphically, it's a point on a v(t) curve or the slope of an x(t) curve I average velocity ~vavg is not a function of time I it's defined for an interval between instants (t1 ! t2, ti ! tf , t0 ! t, etc.) I graphically, it's the \rise over run" between two points on an x(t) curve I in 1D, vx can be called v I it's a component that is positive or negative I vectors don't have signs but their components do What you need to be able to do I Given starting/ending position, time, speed for one or more trip legs, calculate average -

Oscillations
CHAPTER FOURTEEN OSCILLATIONS 14.1 INTRODUCTION In our daily life we come across various kinds of motions. You have already learnt about some of them, e.g., rectilinear 14.1 Introduction motion and motion of a projectile. Both these motions are 14.2 Periodic and oscillatory non-repetitive. We have also learnt about uniform circular motions motion and orbital motion of planets in the solar system. In 14.3 Simple harmonic motion these cases, the motion is repeated after a certain interval of 14.4 Simple harmonic motion time, that is, it is periodic. In your childhood, you must have and uniform circular enjoyed rocking in a cradle or swinging on a swing. Both motion these motions are repetitive in nature but different from the 14.5 Velocity and acceleration periodic motion of a planet. Here, the object moves to and fro in simple harmonic motion about a mean position. The pendulum of a wall clock executes 14.6 Force law for simple a similar motion. Examples of such periodic to and fro harmonic motion motion abound: a boat tossing up and down in a river, the 14.7 Energy in simple harmonic piston in a steam engine going back and forth, etc. Such a motion motion is termed as oscillatory motion. In this chapter we 14.8 Some systems executing study this motion. simple harmonic motion The study of oscillatory motion is basic to physics; its 14.9 Damped simple harmonic motion concepts are required for the understanding of many physical 14.10 Forced oscillations and phenomena. In musical instruments, like the sitar, the guitar resonance or the violin, we come across vibrating strings that produce pleasing sounds. -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy. -

Chapter 04 Rotational Motion
Chapter 04 Rotational Motion P. J. Grandinetti Chem. 4300 P. J. Grandinetti Chapter 04: Rotational Motion Angular Momentum Angular momentum of particle with respect to origin, O, is given by l⃗ = ⃗r × p⃗ Rate of change of angular momentum is given z by cross product of ⃗r with applied force. p m dl⃗ dp⃗ = ⃗r × = ⃗r × F⃗ = ⃗휏 r dt dt O y Cross product is defined as applied torque, ⃗휏. x Unlike linear momentum, angular momentum depends on origin choice. P. J. Grandinetti Chapter 04: Rotational Motion Conservation of Angular Momentum Consider system of N Particles z m5 m 2 Rate of change of angular momentum is m3 ⃗ ∑N l⃗ ∑N ⃗ m1 dL d 훼 dp훼 = = ⃗r훼 × dt dt dt 훼=1 훼=1 y which becomes m4 x ⃗ ∑N dL ⃗ net = ⃗r훼 × F dt 훼 Total angular momentum is 훼=1 ∑N ∑N ⃗ ⃗ L = l훼 = ⃗r훼 × p⃗훼 훼=1 훼=1 P. J. Grandinetti Chapter 04: Rotational Motion Conservation of Angular Momentum ⃗ ∑N dL ⃗ net = ⃗r훼 × F dt 훼 훼=1 Taking an earlier expression for a system of particles from chapter 1 ∑N ⃗ net ⃗ ext ⃗ F훼 = F훼 + f훼훽 훽=1 훽≠훼 we obtain ⃗ ∑N ∑N ∑N dL ⃗ ext ⃗ = ⃗r훼 × F + ⃗r훼 × f훼훽 dt 훼 훼=1 훼=1 훽=1 훽≠훼 and then obtain 0 > ⃗ ∑N ∑N ∑N dL ⃗ ext ⃗ rd ⃗ ⃗ = ⃗r훼 × F + ⃗r훼 × f훼훽 double sum disappears from Newton’s 3 law (f = *f ) dt 훼 12 21 훼=1 훼=1 훽=1 훽≠훼 P. -
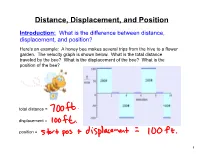
Distance, Displacement, and Position
Distance, Displacement, and Position Introduction: What is the difference between distance, displacement, and position? Here's an example: A honey bee makes several trips from the hive to a flower garden. The velocity graph is shown below. What is the total distance traveled by the bee? What is the displacement of the bee? What is the position of the bee? total distance = displacement = position = 1 Warm-up A particle moves along the x-axis so that the acceleration at any time t is given by: At time , the velocity of the particle is and at time , the position is . (a) Write an expression for the velocity of the particle at any time . (b) For what values of is the particle at rest? (c) Write an expression for the position of the particle at any time . (d) Find the total distance traveled by the particle from to . 2 Warm-up Answers (a) (b) (c) (d) Total Distance = 3 Now, using the equation from the warm-up find the following (WITHOUT A CALCULATOR): (a) the total distance from 0 to 4 (b) the displacement from 0 to 4 4 To find the displacement (position shift) from the velocity function, we just integrate the function. The negative areas below the x-axis subtract from the total displacement. Displacement = To find the distance traveled we have to use absolute value. Distance traveled = To find the distance traveled by hand you must: Find the roots of the velocity equation and integrate in pieces, just like when we found the area between a curve and x-axis. -

Analytical Mechanics
A Guided Tour of Analytical Mechanics with animations in MAPLE Rouben Rostamian Department of Mathematics and Statistics UMBC [email protected] December 2, 2018 ii Contents Preface vii 1 An introduction through examples 1 1.1 ThesimplependulumàlaNewton ...................... 1 1.2 ThesimplependulumàlaEuler ....................... 3 1.3 ThesimplependulumàlaLagrange.. .. .. ... .. .. ... .. .. .. 3 1.4 Thedoublependulum .............................. 4 Exercises .......................................... .. 6 2 Work and potential energy 9 Exercises .......................................... .. 12 3 A single particle in a conservative force field 13 3.1 The principle of conservation of energy . ..... 13 3.2 Thescalarcase ................................... 14 3.3 Stability....................................... 16 3.4 Thephaseportraitofasimplependulum . ... 16 Exercises .......................................... .. 17 4 TheKapitsa pendulum 19 4.1 Theinvertedpendulum ............................. 19 4.2 Averaging out the fast oscillations . ...... 19 4.3 Stabilityanalysis ............................... ... 22 Exercises .......................................... .. 23 5 Lagrangian mechanics 25 5.1 Newtonianmechanics .............................. 25 5.2 Holonomicconstraints............................ .. 26 5.3 Generalizedcoordinates .......................... ... 29 5.4 Virtual displacements, virtual work, and generalized force....... 30 5.5 External versus reaction forces . ..... 32 5.6 The equations of motion for a holonomic system . ... -

Fundamental Governing Equations of Motion in Consistent Continuum Mechanics
Fundamental governing equations of motion in consistent continuum mechanics Ali R. Hadjesfandiari, Gary F. Dargush Department of Mechanical and Aerospace Engineering University at Buffalo, The State University of New York, Buffalo, NY 14260 USA [email protected], [email protected] October 1, 2018 Abstract We investigate the consistency of the fundamental governing equations of motion in continuum mechanics. In the first step, we examine the governing equations for a system of particles, which can be considered as the discrete analog of the continuum. Based on Newton’s third law of action and reaction, there are two vectorial governing equations of motion for a system of particles, the force and moment equations. As is well known, these equations provide the governing equations of motion for infinitesimal elements of matter at each point, consisting of three force equations for translation, and three moment equations for rotation. We also examine the character of other first and second moment equations, which result in non-physical governing equations violating Newton’s third law of action and reaction. Finally, we derive the consistent governing equations of motion in continuum mechanics within the framework of couple stress theory. For completeness, the original couple stress theory and its evolution toward consistent couple stress theory are presented in true tensorial forms. Keywords: Governing equations of motion, Higher moment equations, Couple stress theory, Third order tensors, Newton’s third law of action and reaction 1 1. Introduction The governing equations of motion in continuum mechanics are based on the governing equations for systems of particles, in which the effect of internal forces are cancelled based on Newton’s third law of action and reaction. -

Energy and Equations of Motion in a Tentative Theory of Gravity with a Privileged Reference Frame
1 Energy and equations of motion in a tentative theory of gravity with a privileged reference frame Archives of Mechanics (Warszawa) 48, N°1, 25-52 (1996) M. ARMINJON (GRENOBLE) Abstract- Based on a tentative interpretation of gravity as a pressure force, a scalar theory of gravity was previously investigated. It assumes gravitational contraction (dilation) of space (time) standards. In the static case, the same Newton law as in special relativity was expressed in terms of these distorted local standards, and was found to imply geodesic motion. Here, the formulation of motion is reexamined in the most general situation. A consistent Newton law can still be defined, which accounts for the time variation of the space metric, but it is not compatible with geodesic motion for a time-dependent field. The energy of a test particle is defined: it is constant in the static case. Starting from ”dust‘, a balance equation is then derived for the energy of matter. If the Newton law is assumed, the field equation of the theory allows to rewrite this as a true conservation equation, including the gravitational energy. The latter contains a Newtonian term, plus the square of the relative rate of the local velocity of gravitation waves (or that of light), the velocity being expressed in terms of absolute standards. 1. Introduction AN ATTEMPT to deduce a consistent theory of gravity from the idea of a physically privileged reference frame or ”ether‘ was previously proposed [1-3]. This work is a further development which is likely to close the theory. It is well-known that the concept of ether has been abandoned at the beginning of this century. -

Chapter 6 the Equations of Fluid Motion
Chapter 6 The equations of fluid motion In order to proceed further with our discussion of the circulation of the at- mosphere, and later the ocean, we must develop some of the underlying theory governing the motion of a fluid on the spinning Earth. A differen- tially heated, stratified fluid on a rotating planet cannot move in arbitrary paths. Indeed, there are strong constraints on its motion imparted by the angular momentum of the spinning Earth. These constraints are profoundly important in shaping the pattern of atmosphere and ocean circulation and their ability to transport properties around the globe. The laws governing the evolution of both fluids are the same and so our theoretical discussion willnotbespecifictoeitheratmosphereorocean,butcanandwillbeapplied to both. Because the properties of rotating fluids are often counter-intuitive and sometimes difficult to grasp, alongside our theoretical development we will describe and carry out laboratory experiments with a tank of water on a rotating table (Fig.6.1). Many of the laboratory experiments we make use of are simplified versions of ‘classics’ that have become cornerstones of geo- physical fluid dynamics. They are listed in Appendix 13.4. Furthermore we have chosen relatively simple experiments that, in the main, do nor require sophisticated apparatus. We encourage you to ‘have a go’ or view the atten- dant movie loops that record the experiments carried out in preparation of our text. We now begin a more formal development of the equations that govern the evolution of a fluid. A brief summary of the associated mathematical concepts, definitions and notation we employ can be found in an Appendix 13.2. -

Lagrangian Mechanics - Wikipedia, the Free Encyclopedia Page 1 of 11
Lagrangian mechanics - Wikipedia, the free encyclopedia Page 1 of 11 Lagrangian mechanics From Wikipedia, the free encyclopedia Lagrangian mechanics is a re-formulation of classical mechanics that combines Classical mechanics conservation of momentum with conservation of energy. It was introduced by the French mathematician Joseph-Louis Lagrange in 1788. Newton's Second Law In Lagrangian mechanics, the trajectory of a system of particles is derived by solving History of classical mechanics · the Lagrange equations in one of two forms, either the Lagrange equations of the Timeline of classical mechanics [1] first kind , which treat constraints explicitly as extra equations, often using Branches [2][3] Lagrange multipliers; or the Lagrange equations of the second kind , which Statics · Dynamics / Kinetics · Kinematics · [1] incorporate the constraints directly by judicious choice of generalized coordinates. Applied mechanics · Celestial mechanics · [4] The fundamental lemma of the calculus of variations shows that solving the Continuum mechanics · Lagrange equations is equivalent to finding the path for which the action functional is Statistical mechanics stationary, a quantity that is the integral of the Lagrangian over time. Formulations The use of generalized coordinates may considerably simplify a system's analysis. Newtonian mechanics (Vectorial For example, consider a small frictionless bead traveling in a groove. If one is tracking the bead as a particle, calculation of the motion of the bead using Newtonian mechanics) mechanics would require solving for the time-varying constraint force required to Analytical mechanics: keep the bead in the groove. For the same problem using Lagrangian mechanics, one Lagrangian mechanics looks at the path of the groove and chooses a set of independent generalized Hamiltonian mechanics coordinates that completely characterize the possible motion of the bead. -
Force-Based Element Vs. Displacement-Based Element
Force-based Element vs. Displacement-based Element Vesna Terzic UC Berkeley December 2011 Agenda • Introduction • Theory of force-based element (FBE) • Theory of displacement-based element (DBE) • Examples • Summary and conclusions • Q & A with web participants Introduction • Contrary to concentrated plasticity models (elastic element with rotational springs at element ends) force-based element (FBE) and displacement- based element (DBE) permit spread of plasticity along the element (distributed plasticity models). • Distributed plasticity models allow yielding to occur at any location along the element, which is especially important in the presence of distributed element loads (girders with high gravity loads). Introduction • OpenSees commands for defining FBE and DBE have the same arguments: element forceBeamColumn $eleTag $iNode $jNode $numIntgrPts $secTag $transfTag element displacementBeamColumn $eleTag $iNode $jNode $numIntgrPts $secTag $transfTag • However a beam-column element needs to be modeled differently using these two elements to achieve a comparable level of accuracy. • The intent of this seminar is to show users how to properly model frame elements with both FBE and DBE. • In order to enhance your understanding of these two elements and to assure their correct application I will present the theory of these two elements and demonstrate their application on two examples. Transformation of global to basic system Element u p u p p aT q v = af u GeometricTran = f q3,v3 q1,v1 v q Basic System q2,v 2 Displacement-based element • The displacement-based approach follows standard finite element procedures where we interpolate section deformations from an approximate displacement field then use the PVD to form the element equilibrium relationship. -
Angular Kinematics Contents of the Lesson
Angular Kinematics Contents of the Lesson Angular Motion and Kinematics Angular Distance and Angular Displacement. Angular Speed and Angular Velocity Angular Acceleration Questions. Motion “change in the position of an object with respect to some reference frame.” Planes and Axis. Angular Motion “Rotation of a object around a central imaginary line” Characteristics: ◦ Axis of rotation. ◦ Whole object moves. Identify the angular motion Angular motion in the human body “most of movement are angular” In the human body; ◦ Joint= Axis of rotation. ◦ Body segment= object or rotatory body. ◦ Initial position= anatomical position. Kinematics; Angular Kinematics “Description of Angular Motion” Seeks to answer? “How much something has rotated?” “How fast something is rotating?” etc. Units of measurements Degrees. Radian Units of measurement Revolutions 1 revolution= 1 circle= 360 degrees= 2휋.radians Angular Distance “Sum of all angular changes undergone by a rotatory body” Unit: degrees, radian revolution. Angular Displacement “difference between the initial and final position of a rotatory body around an axis of rotation with regards to direction.” Direction= counter clockwise or clockwise In Human movement= Flexion,Extension,etc. What will be the angular displacement? Angular Speed “Scalar quantity” “angular distance covered divided by time interval over which the motion occurred” Angular Velocity “Vector quantity” “rate of change of angular position or angular displacement w.r.t time” Angular speed and Velocity Angular speed = degree/sec, rad/sec, or revolution/sec. Angular Velocity= degree/sec, rad/sec, or revolution/sec counterclockwise, clockwise or flexion or extension, etc. Angular Acceleration “Rate of change of angular velocity w.r.t time.” Unit= degree/sec² Calculate acceleration.